 電子發燒友App
電子發燒友App


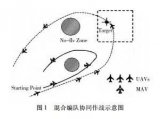
近年來,無人機具有低成本、無人員傷亡、設備簡單、操作方便和靈活可靠等特點被廣泛應用。其可以近距離對地面目標有選擇性和針對性地實施觀測,并且可以進入敵方陣地進行監視,提高情報的可靠性和時效性。在軍事偵察和民用測量上采用一定的編隊隊形進行飛行,可以擴大偵察和搜索的范圍。多架無人機編隊飛行協同偵察時,通過調整相機在無人機上的安裝角度,可對目標的全方位立體拍照,實現地面目標的偵察和監視。
單架無人機采用先進控制策略可實現實時的高精度姿態控制,完成軌跡追蹤,但是多無人機編隊飛行執行任務的成功率和抗突發事件的能力要比單架飛機飛行高。例如,在某次任務的執行過程中,有一架飛機出現故障不能繼續工作,那么它可以返回進行維修,而其余飛機仍舊按照原來的計劃保持編隊飛行,使任務得以圓滿完成。但是現有的科技水平還無法支持完全意義上的多無人機編隊自主決策功能,幾乎不能實現較高程度智能化集群式大規模協同編隊飛行,因此深入開展信息感知技術、數據融合技術、任務分配技術、航跡規劃技術、編隊控制技術、通信組網技術和虛擬/實物驗證實驗平臺技術等多項技術的研究,以及多項技術間協同研究,對中國實現美國空軍發布的2016年—2036年小型無人機發展規劃中“蜂群”、“編組”、“忠誠僚機”和誘餌等多無人機協同編隊具有重要指導意義。
協同編隊飛行任務描述
為了達到多無人機協同編隊飛行的擴大任務范圍、提高任務執行效率和完成質量、增強在高危環境中的作戰能力、提升系統對環境自適應能力、擴展任務能力等多個目標,必須研究多無人機的狀態感知和數據融合、任務分配和航跡規劃、編隊控制和通信組網等多個技術,并研究多項技術間的協同作用。
多無人機協同編隊執行危險任務是一種必然趨勢。進行多無人機協同編隊,首先要進行信息感知,并對多源信息進行融合;其次對各種任務進行分配和決策;進而對每架無人機進行航跡規劃生成期望的軌跡;然后利用先進的編隊控制方法和隊形設計技術實現多機編隊飛行任務;在編隊控制設計過程中,需要考慮多無人機之間的組網通信問題;最后,搭建模擬多無人機協同編隊飛行虛擬仿真平臺和實物演示平臺,驗證編隊控制算法的可行性和有效性。
任務分配
無人機飛行的環境日益復雜及于無人機性能等要求的提高,對無人機編隊任務分配的時效性、處理位置環境能力、求解速度等提出了更高的要求。
2010年,美國麻省理工學院大學Mcgrew等,針對固定速度一對一作戰機動問題,用近似動態規劃技術進行求解,該方法針對快速變化的戰術情況能夠提供快速響應,并在室內完成了飛行試驗,對算法進行了驗證。2011年,印度Sujit等。針對兩個無人機的未知區域協同搜索問題展開研究,考慮了無人機通信范圍、傳感器探測范圍、油量限制及補給站位置等約束條件,采用博弈論的方法對該問題進行了求解,仿真結果表明基于博弈論的方法對于未知環境的搜索效率很高。2011年,美國波爾圖大學Manathara等,針對多無人機作戰的最優資源分配問題,針對多種異構無人機設計了任務分配策略,并采用啟發式算法進行求解。2014年,美國珀杜大學Kim等針對異構無人機的編隊區域搜索和任務分配問題,提出了一種基于響應閾值模型的概率決策機制的分布式方法,考慮了環境的不確定性,實現了快速靈活的無人機區域搜索和任務分配。2015年馬來西亞科技大學Wei等,針對傳統粒子群算法求解過程中求解過慢或易陷入局部極小的問題,提出了一種雙級任務分配方法,通過雙極任務分配結構自適應的條件搜索效率,相比傳統粒子群算法提高了求解的可靠性、搜索精度和搜索效率,最終提高了任務分配的求解速度。
航跡規劃
為了確保復雜環境中多無人機編隊能夠安全、快速到達任務區域,降低被敵方雷達捕獲、摧毀的概率,需要設計滿足一定約束條件及性能指標最優的編隊航跡。
2013年,英國諾森比亞大學的Kothari等,采用機會約束方法來處理系統環境和環境態勢感知中的不確定性,再通過快速隨機搜索樹方法獲取了多無人機魯棒最優路徑。2015年,北京航空航天大學的段海濱等,將無人機全局路徑規劃問題轉化為三維空間含約束的優化問題,并采用改進的差分進化算法進行求解,克服了傳統差分進化算法容易陷入局部極小的問題,相比傳統方法提高了無人機路徑的約束處理能力、路徑質量和魯棒性。2016年,加拿大魁北克大學的Berger等,針對異構飛行器的靜態目標搜索問題,建立新的整數線性和二次規劃模型,降低了計算復雜度,采用線性規劃算法求解,以輕微的計算代價獲得了包含異構飛行器的近似最優解。2016年,沈陽航空航天大學的梁宵等,在復雜環境下對移動目標的路徑跟蹤問題,采用滾動時域優化結合人工勢場法,獲取無人機的前進方向,實時給出針對移動目標的最優軌跡。
在實際飛行過程中,需要考慮編隊避撞問題。2014年,伊朗伊斯蘭阿扎德大學的Shorakaei等,將無人機之間避撞作為性能指標,采用基于概率的環境建模方法,研究了多無人機協同搜索問題,并運用平行遺傳算法進行求解,設計了二維及三維的最優路徑。遺傳算法的優點是易于與其他算法相結合,并充分發揮自身迭代的優勢,缺點是運算效率不高,不如蟻群等算法有先天優勢。2013年,華中科技大學的丁明躍等,針對海上無人機路徑規劃問題,提出了一種基于量子行為粒子群優化的混合差分進化算法,用于在不同威脅環境下生成一條安全和可飛的路徑。粒子群算法模擬鳥群飛行捕食行為,相比遺傳算法規則更為簡單,求解速度更快,但容易陷入局部收斂。
編隊控制
編隊隊形設計與調整
隊形設計。在實際任務執行中,多無人機以不同的隊形形成編隊,如楔隊、梯隊、橫隊、縱隊和V形等,可以實現協同偵察、防御和進攻等復雜任務。合理有效的隊形設計可以延長無人機編隊飛行距離、節省燃料消耗、增加編隊靈活性,這大大提高其安全性與任務完成率。2011年,英國機械工程師協會的報告指出V字隊形最高可節省12%的燃料,這種編隊模式用于跨洋飛行或長途飛行的客機編隊,大大延長了飛行距離并節省燃料消耗。從任務需求的角度出發,新加坡南洋理工大學的朱森強等,針對多無人機固定區域的資源探測問題,設計了一種圓形編隊隊形,這種隊形不僅能擴大探測半徑,還能有效提高探測資源區域的效率,有效地完成了多無人機協同探測任務。從編隊靈活性出發,2015年,英國貝爾法斯特女王大學Lau等,針對多無人機任意隊形設計問題,通過提出基于張拉整體結構隊形建模方法,得到多種穩定隊形,這種隊形構造方法實現了隊形的靈活調整,并使多無人機適應了外界環境的變化。
2009年,復旦大學研究團隊,指出實際空戰中,編隊戰術通常是以基本的兩機編隊為單元,按照層級的概念建立起大規模的飛機編隊。僚機在長機的前15°到后20°區域形成一字編隊隊形時,具有良好的攻擊性和防御性,適合于高空;僚機在長機后30°到60°的區域時,整體操縱性良好,適合于低空。
編隊飛行控制方法
在多無人機編隊執行偵察和防御等任務時,需要多無人機保持一定隊形編隊飛行到任務執行區域。編隊保持的控制方法主要有leader-follower方法、基于行為法、虛擬結構法、圖論法和基于一致性方法,每種編隊方法適應不同環境,各有優缺點。
leader-follower法。Leader-follower方法是目前多無人機編隊控制中最常用的方法之一。leader跟蹤一個預先給定的軌跡,follower和leader軌跡保持一定構型,并速度達到一致。leader可以看成是目標追蹤的對象,或是整個多智能體的共同利益。賓西法尼亞大學的Desai團隊對該方法做了大量理論和實驗上的研究工作。2012年,該團隊Turpin等研究了改進的leader-follower編隊方法,其中每架無人機從與之通信的其他無人機中間接獲取跟蹤的leader的狀態。2015年,該團隊Saska等,基于機載視覺感知設備和leader-follower方法實現了非GPS定位密集編隊飛行。目前,該團隊研究還包括多智能體協作規劃、避障、協作抓取和運輸等理論工作。
基于行為法。基于行為的編隊方法是定義無人機的幾種基本控制行為,如跟隨、避障和隊形構成等,對定義的幾種行為進行加權得到編隊控制方法。這使系統中的每個單體都具備依據自身決策來協同其他單體完成目標或任務的能力。
受生物群體社會行為的啟發,越來越多團隊通過分析生物系統的行為規律研究多無人機編隊飛行。1999年,美國杜克大學Reif等,針對編隊中個別成員因故障而失效使得傳感器獲得的信息傳輸不完整的問題,提出了一種類似于行為的電勢場方法,實現了存在個別成員故障失效情況下的編隊。2003年,美國Jadbabaie等,對基于行為法進行了深入的分析,提出了最近鄰協調思想。2009年,Kim等,提出了一種基于反饋線性化方法設計的分布式行為控制器。2015年,北京航空航天大學研究團隊,提出了一種基于鴿群特性的編隊控制方法,該方法利用圖論和勢場函數理論對編隊中的拓撲結構和群體中的主從關系進行定義,實現了對無人機緊密編隊飛行的仿真。
在傳感器數據錯誤或缺乏的情況下,基于行為法的多無人機編隊能夠綜合考慮多無人機協同編隊飛行中的多個行為,有效整合各種行為,從而使整個編隊仍然可以保持。該方法根據預設信息和觸發條件來形成控制指令,因此降低了編隊的適應性和靈活性。
虛擬結構法。虛擬結構法是一種集中式控制方法,由美國加利福尼亞大學Lewis等,在1997年首次提出。將編隊作為一個虛擬剛體,在編隊中設定一個虛擬長機或虛擬幾何中心,隊中所有無人機都參照虛擬長機或虛擬幾何中心運動。
2001年,美國楊百翰大學Beard等,針對航天器的編隊問題,綜合利用虛擬結構、“長機-僚機”及行為方法的合成,實現了航天器在深度空間的編隊飛行。2002年,美國加州理工學院Saber等,針對編隊隊形快速定位及隊形穩定問題,提出了基于二維空間的虛擬長機和幾何中心的編隊結構。
虛擬結構法避免了,領航跟隨者方法中領航無人機出現故障或毀機時編隊無法保持的缺點。而且該方法通過把編隊誤差反饋加到控制器,得到了較高的編隊控制精度。然而,合成虛擬長機和獲取鄰機位置,需要較高的通信質量和強計算能力,這使得編隊可靠性較差。而且此方法要求編隊飛行必須剛性運動,限制了實際飛行的應用范圍。
圖論法。圖論法利用拓撲圖上的頂點來描述單個無人機,兩點之間的邊用來表述無人機間的關聯/約束拓撲關系,例如感知、通信或控制連接等,將控制理論引入圖中,可以構建編隊控制策略。
剛性圖論在編隊中應用取得了比較大的進展。一般來講,剛性圖處理的對象是無向圖,即無人機之間的聯系是雙向的。在很多實際情況中,為了簡潔通信量,多無人機系統常常利用有向圖表示。2007年,比利時魯汶大學Hendrickx等,等提出了有向剛性的概念,給出了有向剛性的定義并給出了生成有向剛性圖的策略。該團隊在2D剛性圖的基礎上延伸到3D甚至更高維數,給出高維空間上的剛性圖與有向圖持久性的充分必要條件。2013年,澳大利亞莫納什大學Barca等,引入圖論到多機器人編隊中,完善領航者-追隨者的多機器人控制機制,使多機器人形成二維編隊而不需要彼此通信。
2016年,美國路易斯安那州立大學Ramazani等,針對不同平面運動個體間的協同控制問題,利用剛性圖論分別對單積分和雙積分模型進行了協同仿真實驗。燕山大學羅小元等,針對多智能體最優剛性編隊問題,設計了最優持久編隊自動生成算法,生成了最優持久編隊。
利用剛性圖可以表示任意隊形,且圖論有成熟的理論作為研究基礎,但是仿真研究實現較難。
一致概念最早出現在計算機分布式計算網絡化的動態系統中。2004年,美國加利福尼亞大學Saber等,得到多智能體系統一致收斂的充要條件是拓撲圖是連通的。2005年,任偉等,證明了有向網絡拓撲只要存在生成樹結構,則所智能體可實現全局一致收斂。任偉等和Jadbabaie等研究得到動態網絡拓撲下多智能體實現一致性收斂的充要條件:在任意時間段的網絡拓撲都有一個生成樹結構,則多智能體可實現一致性收斂任偉等,進而將一致性控制引入到多智能體編隊控制系統中。2009年,韓國首爾大學Seo等,針對多無人機時變編隊問題,采用基于一致性反饋線性化方法,保證了多無人機按照給定時變隊形進行編隊飛行。2013年,東南大學研究團隊等通過有限時間一致性算法處理了有領航者和無領航者的編隊控制問題。
基于一致性進行分布式大規模編隊具有良好的靈活性和適應性,同時編隊魯棒性也不會因某架無人機損傷或毀機而降低。同時改變的是不依賴某一控制單元,并且某架無人機發生故障對整體隊形不會有太大影響。但是分布式控制算法比較復雜,對通信信道容量及通信時延的要求較高,目前的所設計的編隊控制器不能長時間保障所有無人機收斂到一致狀態。
為了避免幾種方法缺點,人們提出了很多綜合多種方法優點的改進方法。2016年,波蘭比亞韋斯托克科技大學Kownacki針對多無人機編隊過程中機間通信問題,提出一種結合虛擬結構、leader-follower方法及基于行為的編隊方法,提高了無人機編隊飛行過程中機間信息共享的可靠性和吞吐量。其他編隊控制方法還有模型預測控制、模糊邏輯、神經網絡技術、信息感知視覺傳感器等方法,可以實現機群間通信不完整情況下編隊飛行。
編隊重構及避撞
多無人機編隊重構包括隊形切換及缺少一架或多架無人機時新編隊隊形的重構,在隊形重構過程中必須考慮機間避撞。例如,多無人機編隊飛行執行任務時,需要規避雷達、電磁干擾、敵機和較大障礙物,變換合適的隊形可以增加任務完成率。實現無人機編隊重構的方法有:1)勢能域函數方法;2)滾動時域法;3)模型預測法;4)生物算法;5)最優控制法。
2010年,新加坡南洋理工大學Lie等,針對固定翼無人機編隊重構控制問題,給出最終的編隊位置和重構時間,設計了帶有防撞機制的滑模跟蹤控制器,最終實現了安全隊形重構。2015年,印度特里凡得瑯工程學院Rajasree等,針對無障礙物多無人機編隊重構問題,通過合適地選擇時變編隊向量形成任意期望編隊,實現了環形編隊中一架出現故障時編隊的重構情況。2016年,加拿大女王大學Hafez等,針對無人機協同編隊重構問題,采用基于學習的模型預測控制方法,實現了無人機形成緊密編隊安全繞過靜止障礙物。2016年,新加坡國立大學廖峰團隊,應用勢能域函數方法對垂直起降無人機系統外環設計了編隊及重構控制器,又對內環設計魯棒跟蹤控制器,實現了垂直起降無人機編隊飛行與重構問題。
在國內,2012年,北京航空航天大學研究團隊,采用基于鴿群優化方法,設計了終端狀態和控制動作能量約束下的多無人機編隊重構控制器,實現了最優的多無人機編隊重構。2014年,該團隊利用滾動時域方法將多無人機編隊全局重構問題轉化成幾個在線局部最優問題,利用差分進化(DE)算法優化各無人機控制序列,最終使多無人機形成新的隊形。2015年,大連理工大學彭會軍等,提出了一種新的辛迭代數值算法,以獲得最佳的解決方案的非線性滾動時域控制策略,使得多無人機在編隊重構過程中更快速形成編隊并且對參數具有強魯棒性。2016年,沈陽航空航天大學研究團隊,通過設計編隊重構時的安全距離,將編隊重構問題轉化成帶有約束的時間最優控制問題。2016年,景德鎮陶瓷學院研究團隊等,提出了自主重構的內點算法,將編隊重構問題最終轉化成標準非線性單目標最優化問題。
其他編隊重構的思路還有:2009年,捷克布拉格捷克理工大學Spinka等,設計了一個新的分布式分層結構,實現了故障時遙控自動駕駛多無人機重構;2014年,巴西圣克魯斯州立大學Giacomin等,提出了一種分段算法,算法重新配置了每架無人機的緯度,并利用導航協助每架無人機完成編隊重構。
信息感知與數據融合
無人機通過紅外探測儀,攝像機和雷達等機載傳感器設備對周圍環境進行探測,實現對空地環境的感知,無人機還具有編隊內部感知能力,來保持編隊構型和實現協同編隊飛行,提高多無人機編隊安全性和可靠性。無人機將感知信息進行機間共享,通過信息處理與數據融合實現無人機編隊協同感知,從而獲得更廣的探測范圍和更加精確全面的環境信息,完成多無人機協同編隊偵察等任務。
多無人機編隊協同感知必須解決無人機異質傳感器多源信息的融合處理問題,實現無人機對環境準確高效的判讀。2007年,葡萄牙里斯本技術大學Lima等,針對自主傳感器和機器人網絡對目標的協同定位問題,采用貝葉斯方法解決多傳感器信息融合問題以及廣義傳感器網絡自身狀態估計問題,提升了對觀測目標協同定位的精確度。2008年,美國蒙特里海軍研究生院Lee,針對多傳感器信息融合問題,提出了一種新的不確定信息濾波器算法,該算法通過統計線性誤差傳播方法處理不確定數據,得到了未知信息的不確定性程度。2010年,國防科學技術大學王林等,針對多移動傳感器測量的融合估計問題,基于無色變換、交互多模型和信息濾波算法,提出了一種面向多無人機協同感知的分布式融合估計方法,而且無色變換能保證更高的估計精度,可以提高多無人機的融合估計性能。
無人機將感知信息進行機間共享,通過信息處理和數據融合技術實現無人機編隊協同感知,從而獲得更廣的探測范圍和更加精確全面的環境信息。2003年,澳大利亞悉尼大學Ridley等,在其專著里面設計了一種實時分布式機載數據融合系統,包括視覺傳感器和毫米波雷達,實現了對多個地面目標進行跟蹤。2007年,美國康奈爾大學Campbell等,針對多無人機的目標跟蹤問題,提出了一種基于平方根的sigma-point信息濾波算法,該算法通過數據融合實現了兩架無人機的目標跟蹤,并且該算法在數據丟失和出現延時也能提供準確信息,具有高實時性和強魯棒性。2008年,西安電子科技大學楊百勝等,針對多傳感器融合跟蹤問題,采用多個被動傳感器集中式融合跟蹤策略,提出了基于無跡卡爾曼濾波的被動多傳感器融合跟蹤算法,進行了3個被動站跟蹤的仿真研究,驗證了其算法比傳統EKF方法的跟蹤精度更高。
編隊通信
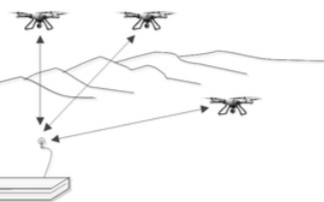
目前,多數國家仍采用地面站直接控制無人機,構建一種星型拓撲結構。多無人機通信組網的思想是:無人機不完全依賴地面站或衛星等設施的控制,將所有無人機看作一個整體,在多無人機間建立一個無線通信網絡,各無人機間相互配合,相互轉發指令、交換信息。該網絡打破了無人機之間沒有任何聯系與合作的傳統作戰思想,可以提高無人機的綜合作戰能力,減小作戰能耗。
2011年,澳大利亞新南威爾士大學Ahmed等,針對無人機與地面站、無人機與無人機之間的鏈路特性進行研究,為多無人機通信組網的設計提供了基礎。2013年,土耳其空軍學院Bekmezci等,從節點移動性、節點密度、拓撲變化頻率和功耗等方面,介紹了飛行自組網不同于其他自組織網絡,并分層總結了飛行自組網的相關協議。2016年,美國華盛頓大學Gupta等,研究了現有技術應用于航空網絡存在的問題,通過調研現有技術對航空網絡的可用性,研討了各種技術的優缺點,并從路由、無縫切換和節能領域進行了詳細分析
編隊仿真平臺
搭建滿足多無人機協同編隊仿真的多無人機仿真平臺,對于加快開發周期,降低多無人機編隊試驗成本,具有十分重要的意義。當前國內外已有一些針對無人機編隊或多無人機仿真系統的研究,主要分為如下4類。
單系統仿真平臺。利用C++開發出了Multi無人機2系統,用于協同控制研究。美國陸軍研究所Garcia基于商用飛行模擬器軟件 X-Plane和MATLAB開發的多無人機仿真平臺,實現了4臺無人機編隊仿真。清華大學周昊等,基于多 Agent 技術開發出了名為無人機sim的仿真平臺,采用分層的體系結構,在單系統內將算法、內核和顯示完全分離,實現了多無人機的仿真, 此類系統成本較低,又可以驗證無人機機群控制及協同規劃算法,但與真實無人機編隊的分布式體系結構不符,不能有效仿真無人機編隊協同任務規劃的全過程。
基于 HLA(high level architecture)架構的分布式系統仿真平臺。HLA是由美國國防部在90年代末提出的,是目前分布式系統仿真的主要技術之一。基于 HLA 的仿真不需要處理底層通信傳輸、仿真運行管理的細節,實驗者可將主要精力放在具體的仿真功能實現上。部分公司開發出基于HLA 的仿真平臺,比如 VR-Forces、 FLAMES等,它們對底層的RTI進行了封裝,提供了更加靈活強大的 API 函數,降低了開發難度。合肥工業大學研究團隊開發出了基于VR-Force的分布式的無人機編隊協同任務規劃仿真系統,能夠仿真多種任務場景下的無人機編隊協同任務規劃過程,以幫助驗證不同類型的協同任務規劃算法,仿真展示度高,但是也帶來了較高的建設成本。
自主開發的多飛行器編隊分布式虛擬系統仿真平臺。該類平臺是對除了HLA架構以外所有的分布式仿真平臺的概括。天津大學研究團隊開發的多飛行器編隊仿真平臺,由模型計算機、系統主控計算機、視景顯示計算機、PC104控制器、無線AP/路由器以及Wi-Fi無線通信模塊組成。模型計算機采用xPC仿真環境,運行單飛行器動力學以及環境模型;系統主控計算機發出任務指令,并監控整個系統的運行;視景顯示計算機實時地進行視景顯示;PC104控制器運行飛行控制算法,實現對單飛行器的控制;無線AP/路由器作為系統無線網絡的中轉站,實現信息交換;Wi-Fi無線通信模塊使有線通信方式轉為無線連接。實現了對于多飛行器編隊系統的實時仿真、視景顯示、算法驗證、通信組網等功能。 該團隊突破了xPC平臺和dSPACE平臺兩項關鍵技術, 實現了對于多無人機編隊飛行控制算法的半實物仿真驗證與性能評估。此類平臺靈活度較大,可以有效對協同控制算法和軌跡優化算法進行仿真驗證,但內部通信機制和管理機制的搭建,需要自主研發,具有一定難度。
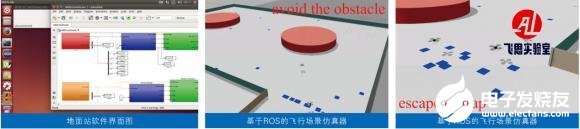
整自主開發的多無人機編隊分布實物系統仿真平臺,整個系統由室內定位系統、多無人機、ZigBee無線傳輸以及地面站組成。首先室內定位系統借助紅外攝像頭對各無人機上的標記點進行抓拍,通過解算實時地計算出每架無人機的當前位置,并以TCP/IP協議的方式傳送給地面站;地面站借助ROS通信機制,在接收定位系統數據的同時運行相關決策算法,計算出每架無人機下一時刻的期望位置,并通過ZigBee無線通信發送出去;無人機通訊網絡以分布式、自組網的形式進行搭建,每架無人機均可與地面站通信,同時彼此間也可以進行數據交互;各無人機接收地面站傳來的數據,提取自身當前位置與期望位置,運行機載控制算法,驅動無人機運動到設定的位置,如此循環往復,最終實現多無人機編隊飛行的仿真驗證。目前該平臺已突破XBEE分布式網絡和PIXHAWK開源飛控兩項關鍵技術,并成功嵌入人工勢場法、圖論法等編隊理論算法。在室內也已實現定點、直線、圓等常用隊形演示,同時在飛行過程中可實時對無人機編隊進行隊形切換。 該平臺可以為多無人機飛行過程算法提供數據支持,并可以直接充當演示效果。所以,該平臺可以很好的為理論研究服務,避免不必要的經費投入。
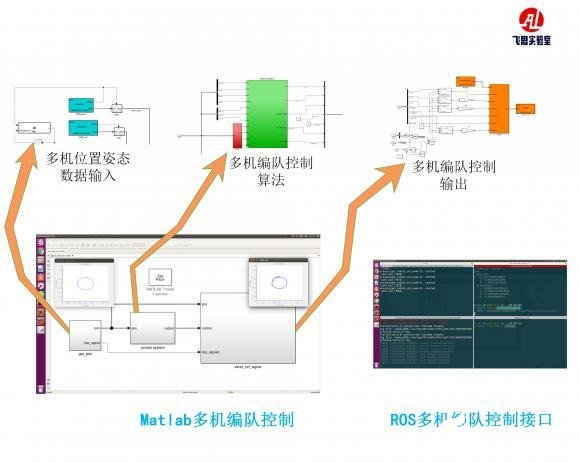
正如,飛思實驗室研發的這款基于室內光學定位系統的室內多旋翼控制平臺,不僅實現了室內無人機集群飛行、集群算法、編隊通信原理等教學實驗,能夠更有效的幫助教研工作者,專注于無人機多機協同編隊等無人機集群關鍵技術研究,檢驗理論成果,提升實驗效率,更能大大推動教學研一體化進程,加速教學、科研的進度。而且它是基于Matlab或ROS的飛行場景仿真器可較真實模擬真實飛行器的動態,并且可模擬節點通訊方式,方便后續仿真。Matlab或ROS的地面控制站可實時讀取基于ROS的飛行場景仿真器、光學室內定位系統節點,還能讀寫真實多旋翼飛行器節點,從而能夠在Matlab或ROS平臺下統一地從仿真到真實實驗,最終輕松完成多旋翼飛行器的控制。

可開設課程多樣化:
多旋翼濾波器設計;
多旋翼定點位置控制器設計;
多旋翼路徑跟隨控制器設計;
多旋翼跟蹤控制器設計;
多旋翼避障控制器設計;
多旋翼區域覆蓋決策設計;
多機編隊控制設計;
多機投遞決策設計。
系統組成:
光學室內定位系統多旋翼飛行器
基于Matlab或ROS的編隊控制站
實驗指導包(指導書、視頻、例程)

系統特點:
平臺統一,高效易用,強勢助力科研
身材Mini續航久,與平臺完美兼容
權威教科書級指導,制定行業標準
視頻和例程由淺入深,輕松上手
結論與展望
通過對近年來國內外多無人機協同編隊飛行控制幾個關鍵技術的進展的綜述,同時展望了每種關鍵技術發展趨勢,具體得出以下結論:
1)現有的任務分配和航跡規劃主要針對離線無人機編隊任務分配和航跡規劃展開研究,未來研究應圍繞復雜環境及有限通信環境下的無人機編隊實時任務分配和多異構無人機編隊實時協同航跡規劃展開。
2)多無人機編隊飛行的控制方法大部分實現了2維編隊,對于3維立體編隊的編隊控制策略研究很少。如何綜合利用各種編隊控制方法的優點,實現多無人機在復雜環境和突發情況下的編隊形成、保持與重構,是未來研究者所要追尋的目標。
3)針對無人機多傳感器數據融合問題的研究與實現主要停留在單個無人機攜帶的多傳感器進行數據融合,而對多無人機編隊所攜帶的多傳感器數據融合問題的研究較少,且大多停留在理論與算法研究上。如何通過合理利用多無人機編隊的多傳感器進行協同感知,擴大感知范圍,提升感知精度,是未來多無人機編隊需要研究重點問題。
4)編隊間的通信研究都是針對某一性能進行的改進,仍停留在理論層面,沒有應用在實際工程中;未來需要結合現有移動自組網技術建立通信標準構建無人機自組織網絡,實現無人機與其他平臺的互聯互通。
5)仿真平臺大部分是對已有算法的仿真和驗證,對多無人機編隊飛行實物演示驗證較少。編隊仿真平臺應以分布式結構為主流,針對實物硬件及虛擬軟件環境進行系統集成,推動并簡化計算,以便更好地適應多核技術迅速發展的背景。
總之,多無人機協同編隊飛行控制的理論雖然取得了豐富成果,但是隨著環境日益復雜和任務的多種多樣,各種多無人機協同編隊飛行關鍵技術也需要迅速發展。未來會出現異構多無人機之間的協同編隊,并且通信環境會異常復雜,感知約束也會隨環境的復雜而增大,迫切需要開展在感知約束和復雜通信環境下的強魯棒、高精度編隊控制設計研究。
責任編輯:gt










 工商網監
工商網監
評論