 電子發燒友App
電子發燒友App


在過去的數十年中,從汽車工業的發展趨勢看,汽車制造對于舒適度、效率、環境友好性的要求不斷提升,對于性能和汽車安全性的期望值也不斷提高。在這一趨勢的帶動下,汽車中的電子子系統以及連接這些子系統的配線的數量大幅增加。線纜的增多導致汽車重量增加,當然也增加了成本。不過,在八十年代初期,Bosch公司推出了CAN總線網絡,這種總線網絡有效降低了線路連接的復雜度,減輕了線纜重量并節省了成本,因而被廣泛用于汽車工業。
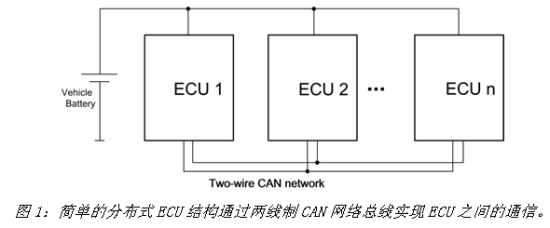
汽車制造從集中控制系統到分布式控制系統的轉變有助于汽車廠商達到降低汽車重量和成本的目標。集中控制系統通過大量線纜將所有執行裝置、傳感器以及開關連接到控制系統,而分布式管理系統將電子控制單元(ECU)放置在需要控制的位置,通過總線系統進行相互通信(例如:兩線制CAN總線網絡)(圖1)。
?
CAN網絡由多個收發器模塊組成,這些收發器通過一對總線鏈接。每個模塊為一個CAN收發器,用于支持協議控制器(微控制器、狀態機或模塊內的其它處理引擎)和物理介質(線纜)之間的物理層互聯。這種新型CAN總線設計需要快速標準化,以確保來自不同廠商的ECU之間正確通信。ISO(國際標準化組織)在1993年首先對其實行了標準化定義,并在2003年和2007做出了進一步修正。目前的ISO 11898標準已經被原始設備制造商(OEM)作為現行標準采用,用于所有汽車內部的CAN通信。
為滿足ISO標準并提供正確的總線電平,大部分CAN收發器總線驅動器需要5V電源供電。但電子系統的主電源通常不能滿足子系統的電源要求。這種情況下,提供的系統電源通常不能直接為CAN收發器供電,例如,系統可能只提供一個3.3V電源。有時由于空間限制無法容納最合適的電源數量;有時則由于發熱問題而無法直接從電池產生5V電壓,特別是在電池電壓較高的CAN通信系統中(如:汽車中采用雙電池的情況,或者24V卡車系統)。
可以利用電壓轉換器產生所要求的電源電壓,對于低功耗、結構簡單的低成本設計,電荷泵通常是最佳的選擇。它不需要昂貴的電感或額外的半導體器件,而且易于使用。
.電荷泵的選擇
1. 收發器電源
目前市面上已有簡單、功能成熟的CAN收發器,有些收發器需要單電源供電,而有些收發器需要多路電源供電。為了使來自不同ECU供應商的模塊之間能夠正確地互操作,并實現遵循ISO 11898標準的高速CAN通信,絕大多數模塊需要一個滿足最大容限要求的5V電源。
有些收發器還帶有內置I/O電平適配器。利用協議控制器的電源(作用在收發器單獨的電源引腳),電平適配器按比例調整收發器的I/O電平,使其達到控制器電平。由此,收發器可直接連接工作在5V以下的控制器,無需任何膠合邏輯。
低功耗管理收發器支持本地和遠程喚醒,因此帶有另外一個電源引腳。該引腳必須由汽車電池持續供電且消耗的電流很小。因而ECU要求高速CAN總線即使在點火鑰匙“關閉”的條件下也必須保持有效工作。
關于CAN收發器其它引腳的功能描述,請參考選定器件的數據資料。
2. 電源電流
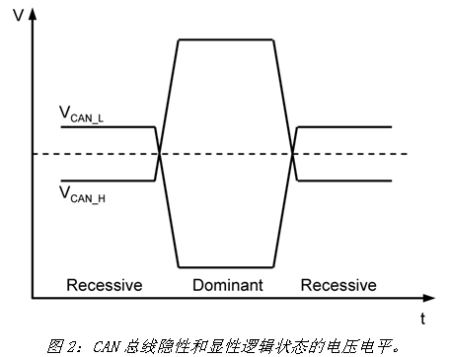
CAN總線通常處于兩個邏輯狀態之一:隱性或顯性(圖2)。正常通信模式下,收發器在顯性狀態下需要最大的輸入電流,隱性狀態所需的輸入電流最小。此時I/O電平適配器和遠程喚醒功能所消耗的電流可以忽略,因為它們通常消耗的是微控制器電源和汽車電池的電流,而且數值非常小。
?
總線出現故障時,電源電流會顯著增大,特別是在CAN_H線與地短路時。大多數收發器都會把短路電流限制在一個特定的最大值。為了防止電源電壓跌落,最好按照這種情況下的電流要求定義電荷泵的輸出電流規格。
基于上述考慮,為了給CAN收發器提供適當的電源,要求電荷泵必須保持5V輸出電壓,并滿足收發器數據資料中的標稱電壓容限,最小輸出電流必須支持CAN_H短路到地的情況。
利用MAX1759電荷泵為MAX13041收發器供電
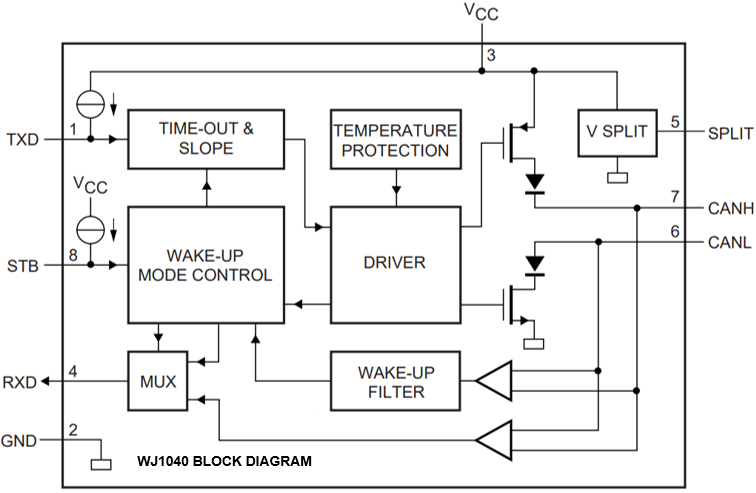
市場上可以找到多種傳統的CAN收發器和電荷泵器件,本文主要關注MAX13041 HS CAN收發器和MAX1759 buck/boost穩壓型電荷泵的設計,解決收發器供電問題。收發器通過VCC引腳供電,為支持標準的ISO 11898 CAN通信,VCC必須保持在4.75V與5.25V之間(標稱工作電壓范圍)。該電壓在總線(CAN-H,CAN-L)之間建立正確的通信信號,并在IC處于正常工作模式時為接收電路供電。
收發器的VI/O輸入使能3.3V I/O微控制器的接口電路,在控制器和收發器的接收/發送 (RxD/TxD)級建立正確的電平。當然,當與5V控制器通信時,VI/O引腳也可以由5V電源供電。
VBAT引腳(通常連接到汽車12V電池)為具有極低靜態電流的喚醒檢測電路供電。根據CAN總線的信息,該引腳可以控制MAX13041從休眠模式喚醒。關于其它引腳的詳細說明,請參考MAX13041數據資料。
正常通信模式下,MAX13041在顯性狀態需要的最大輸入電流(VCC引腳)為80mA,隱性狀態(圖2)下為10mA。流入VI/O和VBAT的電流可忽略不計。當總線出現故障時,VCC電源電流將顯著增大,特別是當CAN_H信號線與地短路時。MAX13041將短路電流限制在IO(SC) = 95mA。
基于上述考慮,為了滿足CAN收發器的供電要求,電荷泵必須具有穩定的5V輸出電壓,確保符合電壓容限的要求,最小輸出電流為95mA。
1. 電荷泵要求
MAX1759架構允許輸入電壓高于或低于穩壓輸出值。而本應用中,電荷泵僅作為升壓轉換器工作。當VIN低于VOUT時,電荷泵作為穩壓型升壓倍壓器工作。輕載下,電荷泵僅在需要維持負載的供電能量時進行開關操作,消耗很小的靜態電流。輕載時,輸出電壓紋波不會增大。
有關電荷泵其它特性的詳細說明,請參考MAX1759數據資料。
2. 實現3.3V方案
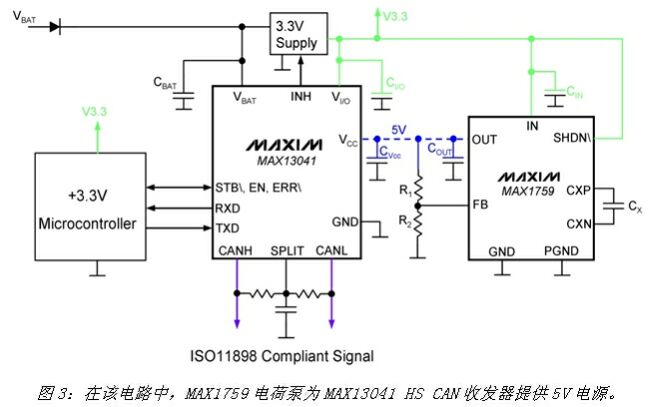
從圖3電路可以看出,用電荷泵為MAX13041供電非常簡單。只需要把MAX1759連接到CAN收發器的VCC輸入(藍色虛線所示),即可產生滿足容限和輸出電流要求的5V輸出電壓。該配置允許其它電路采用低壓供電。本示例中,外部3.3V電源(綠色)為電荷泵(IN)、微控制器以及收發器的VI/O電平轉換器供電。拉高電荷泵的/SHDN,使器件置于ON狀態。MAX1759數據資料詳細介紹了關于輸入/輸出(CIN, COUT)電容和飛電容(CX)的選擇。
?
3. 電磁兼容性
電磁兼容(EMC)是CAN通信網絡的一個設計挑戰,特別是當采用開關型穩壓器供電時。CAN系統的網絡配線是一個關鍵問題,由于CAN收發器的CAN_H和CAN_L引腳是連接整個汽車總線網絡的接口。設計時如果不謹慎,可能從CAN電源產生較大干擾,干擾信號通過收發器,經過總線最終進入其它ECU,或進入鄰近的線纜。這種干擾將造成通信故障或系統其它控制單元之間的傳輸故障。
基于這一考慮,我們測試了采用MAX1759電荷泵供電的MAX13041的EMC特性,并與采用經過濾波的5V電源供電的收發器的EMC特性進行比較。由此,我們可以看到電荷泵的EMC干擾和電荷泵對CAN總線傳輸電源干擾的抑制能力。在本測試中,我們主要考慮兩個方面:電磁抗擾(EMI)和電磁輻射(EME)。
4. 電磁抗擾測試(EMI)
ISO 11452規范規定了幾種抗RF干擾的測試方法,包括大電流注入(BCI)、橫向電磁波室(TEM-cell)、帶狀線以及直接電源注入(DPI)。
由于DPI方法具有較好的可重復性(采用精心設計的測試板),并且測試工作量不大,因此我們選用了該方法。DPI測試原理非常簡單:向總線電纜注入特定的經過調制或未經調制的交流電壓,通過收發器的RXD引腳檢測傳輸數據的信號完整性。這種方法還便于比較不同廠商的設計,可以在獨立的實驗室測試CAN收發器(如IBEE)。
5. 測試裝置
測試裝置(圖4)包括三個焊接在PCB上的相同收發器,其中一個收發器由MAX1759電荷泵供電,節點1作為發送器,用于仿真CAN數據的比特流模板,數據由所有收發器接收并在RxD端口進行監測。對于Rx1至Rx3輸出以及TxD1輸入的RF去耦,采用1k?電阻。每個收發器IC的VCC和VBAT電源端口采用陶瓷電容(C = 100nF)緩沖。喚醒引腳的電阻為33k?。將EN引腳和/STB引腳置于高電平,使器件處于正常工作模式。節點1的VCC電壓由MAX1759電荷泵產生,電荷泵由3.3V供電。3.3V電源還用作節點1收發器的VI/O電壓。

?
電荷泵輸出電容C1為10μF,飛電容C2為330nF,IN輸入引腳采用10μF電容去耦。測試電路中,總線端接采用60? R4電阻進行中心端接。對稱的RF耦合/去耦采用RC并聯網絡,由R5/R6=120?、C3/C4=4.7nF組成。外部3.3V、5V、12V電源由標準電源提供,通過濾波網絡進行濾波。
6. 測試步驟
對正常工作模式下的CAN收發器MAX13041進行測試,在第一輪測試中,所有收發器采用標準VCC = 5V電源供電;第二輪測試中,其中一個收發器由電荷泵供電(圖4)。模板發生器產生占空比為50%的500kbps方波,仿真節點1的TXD引腳的CAN信號(交替的0-1-0數據)。RF輸入HF發生器(HF1)對CAN總線注入一個固定頻率的調幅(AM)交流電壓,功率為36dBm,用于模擬干擾信號。
為評估抑制特性,在饋入TXD的干擾信號的影響下,用示波器比較網絡中三個收發器的Rx信號。根據所允許的±0.9V最大電壓偏差和±0.2μs最大時間偏差確定屏蔽值,覆蓋整個TXD信號波形。
如果達到失效條件(例如,如果一個收發器的RXD信號超出了所確定的屏蔽窗口),將所注入的RF功率降至0.2dBm,并按照特定的頻率步長重復相同測試,直到解除失效狀態。然后,記錄當前的功率值并調整到下一頻率步長。測試頻率范圍覆蓋10MHz至100MHz。
7. DPI測試結果
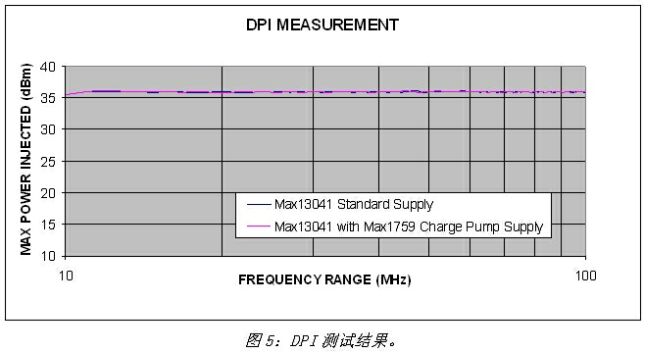
圖5所示為標準5V電源作用在VCC為MAX13041供電時的測試結果(藍色),以及由電荷泵為MAX13041供電時的測試結果(粉色)。X軸表示頻率范圍,Y軸表示沒有發生失效的情況下作允許的最大注入功率。
?
藍線和粉線幾乎相同,表明該電路的EMI特性主要取決于CAN收發器本身的EMI敏感度,而非電荷泵的EMI敏感度。因此,當電路受到任何EMI干擾時,為MAX13041 CAN收發器供電的MAX1759電荷泵不會明顯影響電路性能。
8. 輻射測試(EME)
輻射測試在同一個電路板進行,除了將功率注入電路(HF發生器)替換為頻譜分析儀外,測試裝置與DPI測試相同。測試也是在CAN收發器正常工作模式下進行。第一輪測試在所有收發器采用標準VCC = 5V電源供電條件下進行;第二輪測試在一個CAN節點由電荷泵供電的條件下進行。在CAN TXD輸入作用一個方波信號(仿真500kbps的傳輸比特流),CAN總線的輻射由頻譜分析儀在100kHz至1GHz頻率范圍內進行測量和記錄,無需示波器(圖4)。
9. 輻射測試結果
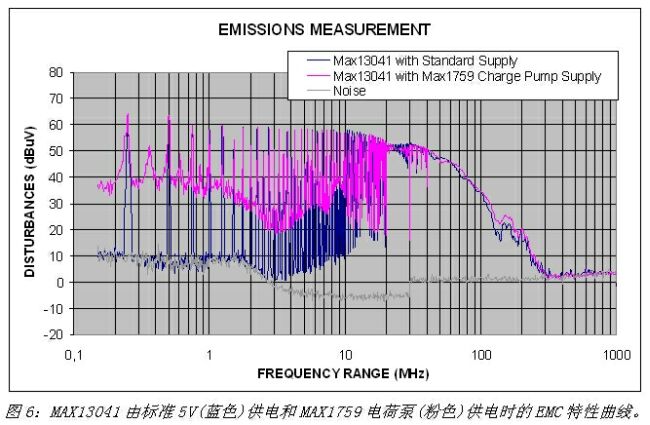
圖6給出了標準5V電源作用在VCC為MAX13041供電的測試結果(藍色),以及電荷泵供電條件下的MAX13041測試結果(粉色)。X軸表示頻率范圍,Y軸表示干擾信號電平。
?
與采用標準5V供電的MAX13041 (藍色)相比,藍線峰值和粉線峰值(其中一個收發器由電荷泵供電)幾乎相同。表明電路的輻射特性主要取決于CAN收發器的輻射兼容性,而非電荷泵。測試結果表明,采用電荷泵為CAN收發器供電并沒有明顯影響系統整體的EMC特性。如果選擇其他半導體廠家的收發器或電荷泵,最好對所選器件進行類似測試,因為每個供應商的產品性能有所不同。
本文小結
在CAN應用中,實現電磁兼容目標是極具挑戰性的設計問題,特別是當收發器由開關穩壓器(電荷泵)供電時。但是,本文推薦的電荷泵不會對電路的EMC特性產生明顯影響。對于要求以低成本實現低功耗、低電壓工作的應用,系統設計人員在沒有現成的5V電源的情況下,可以采用電荷泵給CAN收發器供電。









 工商網監
工商網監
評論