 電子發燒友App
電子發燒友App


TOP5 無人機技術各模塊詳解與技術分析
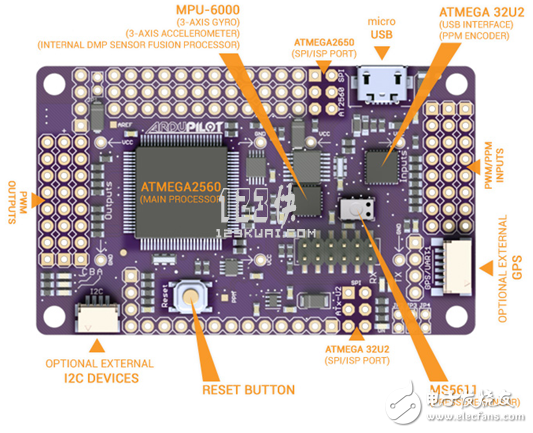
如今無人機成為了展會最大的熱點之一,大疆(DJI)、Parrot、3D Robotics、AirDog等知名無人機公司都有展示他們的最新產品。甚至是英特爾、高通的展位上展出了通信功能強大、能夠自動避開障礙物的飛行器。無人機在2015年已經迅速地成為現象級的熱門產品,甚至我們之前都沒有來得及細細研究它。與固定翼無人機相比,多軸飛行器的飛行更加穩定,能在空中懸停。主機的硬件結構及標準的遙控器的結構圖如下圖。

四軸飛行器系統解析圖

遙控器系統解析圖
以上只是標準產品的解剖圖,有些更加高級的如針對航模發燒友和航拍用戶們的無人機系統,還會要求有云臺、攝像頭、視頻傳輸系統以及視頻接收等更多模塊。
飛控的大腦:微控制器
在四軸飛行器的飛控主板上,需要用到的芯片并不多。目前的玩具級飛行器還只是簡單地在空中飛行或停留,只要能夠接收到遙控器發送過來的指令,控制四個馬達帶動槳翼,基本上就可以實現飛行或懸停的功能。意法半導體高級市場工程師介紹,無人機/多軸飛行器主要部件包括飛行控制以及遙控器兩部分。其中飛行控制包括電調/馬達控制、飛機姿態控制以及云臺控制等。目前主流的電調控制方式主要分成BLDC方波控制以及FOC正弦波控制。
高通和英特爾推的飛控主芯片
CES上我們看到了高通和英特爾展示了功能更為豐富的多軸飛行器,他們采用了比微控制器(MCU)更為強大的CPU或是ARM Cortex-A系列處理器作為飛控主芯片。例如,高通CES上展示的Snapdragon Cargo無人機是基于高通Snapdragon芯片開發出來的飛行控制器,它有無線通信、傳感器集成和空間定位等功能。Intel CEO Brian Krzanich也親自在CES上演示了他們的無人機。這款無人機采用了“RealSense”技術,能夠建起3D地圖和感知周圍環境,它可以像一只蝙蝠一樣飛行,能主動避免障礙物。英特爾的無人機是與一家德國工業無人機廠商Ascending Technologies合作開發,內置了高達6個英特爾的“RealSense”3D攝像頭,以及采用了四核的英特爾凌動(Atom)處理器的PCI- express定制卡,來處理距離遠近與傳感器的實時信息,以及如何避免近距離的障礙物。這兩家公司在CES展示如此強大功能的無人機,一是看好無人機的市場,二是美國即將推出相關法規,對無人機的飛行將有嚴格的管控。
Paul Neil說:xCORE多核微控制器擁有數量在8到32個之間的、頻率高達500MHz 的32位RISC內核。xCORE 器件也帶有Hardware Response I/O接口,它們可提供卓越的硬件實時I/O性能,同時伴隨很低的延遲。“這種多核解決方案支持完全獨立地執行系統控制與通信任務,不產生任何實時操作系統(RTOS)開銷。xCORE微控制器的硬件實時性能使得我們的客戶能夠實現非常精確的控制算法,同時在系統內無抖動。xCORE多核微控制器的這些優點,正是吸引諸如無人機/多軸飛行器這樣的高可靠性、高實時性應用用戶的關鍵之處。”多軸飛行器需要用到四至六顆無刷電機(馬達),用來驅動無人機的旋翼。而馬達驅動控制器就是用來控制無人機的速度與方向。原則上一顆馬達需要配置一顆8位MCU來做控制,但也有一顆MCU控制多個BLDC馬達的方案。
多軸無人機的EMS/傳感器
于用 MEMS傳感器測量角度變化,一般要選擇組合傳感器,既不能單純依賴加速度計,也不能單純依賴陀螺儀,這是因為每種傳感器都有一定的局限性。比如說陀螺儀輸出的是角速度,要通過積分才能獲得角度,但是即使在零輸入狀態時,陀螺依然是有輸出的,它的輸出是白噪聲和慢變隨機函數的疊加,受此影響,在積分的過程中,必然會引進累計誤差,積分時間越長,誤差就越大。這就需要加速度計來校正陀螺儀,因為加速度計可以利用力的分解原理,通過重力加速度在不同軸向上的分量來判斷傾角。由于沒有積分誤差,所以加速度計在相對靜止的條件下可以校正陀螺儀的誤差。但在運動狀態下,加速度計輸出的可信度就要下降,因為它測量的是重力和外力的合力。較常見的算法就是利用互補濾波,結合加速度計和陀螺儀的輸出來算出角度變化。
ADI亞太區微機電產品市場和應用經理表示,ADI產品主要的優勢就是在各種惡劣條件下,均可獲得高精度的輸出。以陀螺儀為例,它的理想輸出是只響應角速度變化,但實際上受設計和工藝的限制,陀螺對加速度也是敏感的,就是我們在陀螺儀數據手冊上常見的deg/sec /g的指標。對于多軸飛行器的應用來說,這個指標尤為重要,因為飛行器中的馬達一般會帶來較強烈的振動,一旦減震控制不好,就會在飛行過程中產生很大的加速度,那勢必會帶來陀螺輸出的變化,進而引起角度變化,馬達就會誤動作,最后給終端用戶的直觀感覺就是飛行器并不平穩。
隨著無人機的功能不斷增加,GPS傳感器、紅外傳感器、氣壓傳感器、超聲波傳感器越來越多地被用到無人機上。方案商已經在利用紅外和超聲波傳感器來開發出可自動避撞的無人機,以滿足將來相關法規的要求。集成了GPS傳感器的無人機則可以實現一鍵返航功能,防止無人機飛行丟失。而內置了GPS功能的無人機,可以在軟件中設置接近機場或航空限制的敏感地點,不讓飛機起飛。










 工商網監
工商網監
評論