 電子發燒友App
電子發燒友App


隨著電子技術的發展,出現了多種PWM技術,其中包括:相電壓控制PWM、脈寬PWM法、隨機PWM、SPWM法、線電壓控制PWM等,而在鎳氫電池智能充電器中采用的脈寬PWM法,它是把每一脈沖寬度均相等的脈沖列作為PWM波形,通過改變脈沖列的周期可以調頻,改變脈沖的寬度或占空比可以調壓,采用適當控制方法即可使電壓與頻率協調變化。可以通過調整PWM的周期、PWM的占空比而達到控制充電電流的目的。
模擬信號的值可以連續變化,其時間和幅度的分辨率都沒有限制。9V電池就是一種模擬器件,因為它的輸出電壓并不精確地等于9V,而是隨時間發生變化,并可取任何實數值。與此類似,從電池吸收的電流也不限定在一組可能的取值范圍之內。模擬信號與數字信號的區別在于后者的取值通常只能屬于預先確定的可能取值集合之內,例如在{0V,5V}這一集合中取值。
模擬電壓和電流可直接用來進行控制,如對汽車收音機的音量進行控制。在簡單的模擬收音機中,音量旋鈕被連接到一個可變電阻。擰動旋鈕時,電阻值變大或變小;流經這個電阻的電流也隨之增加或減少,從而改變了驅動揚聲器的電流值,使音量相應變大或變小。與收音機一樣,模擬電路的輸出與輸入成線性比例。
盡管模擬控制看起來可能直觀而簡單,但它并不總是非常經濟或可行的。其中一點就是,模擬電路容易隨時間漂移,因而難以調節。能夠解決這個問題的精密模擬電路可能非常龐大、笨重(如老式的家庭立體聲設備)和昂貴。模擬電路還有可能嚴重發熱,其功耗相對于工作元件兩端電壓與電流的乘積成正比。模擬電路還可能對噪聲很敏感,任何擾動或噪聲都肯定會改變電流值的大小。
通過以數字方式控制模擬電路,可以大幅度降低系統的成本和功耗。此外,許多微控制器和DSP已經在芯片上包含了PWM控制器,這使數字控制的實現變得更加容易了。
基本原理
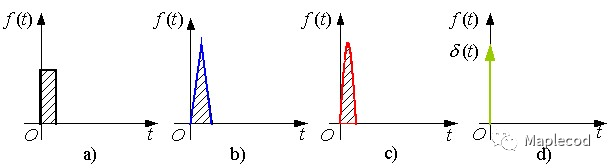
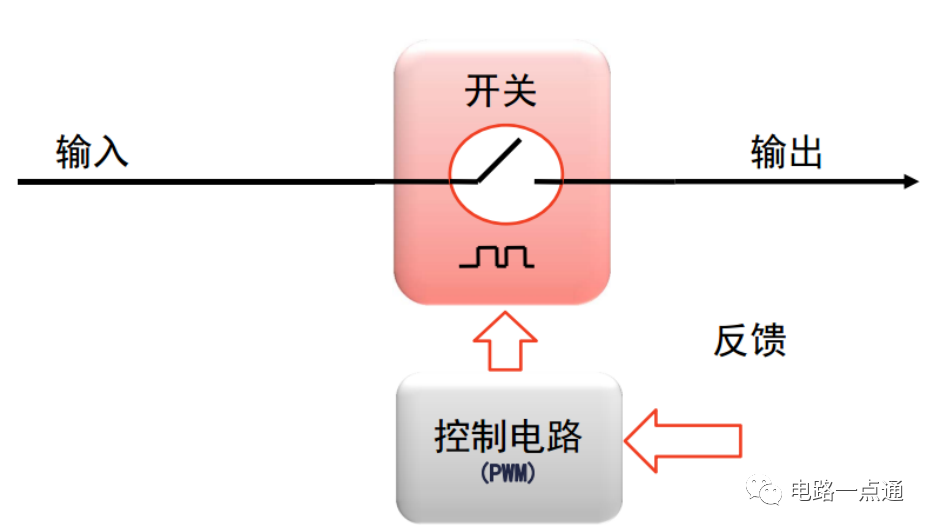
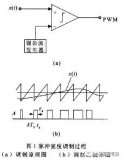
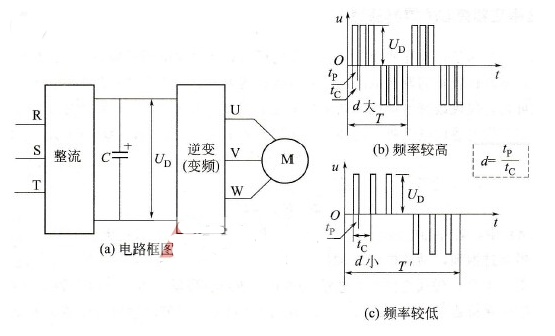
脈寬調制(PWM)基本原理:控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等的脈沖,用這些脈沖來代替正弦波或所需要的波形。也就是在輸出波形的半個周期中產生多個脈沖,使各脈沖的等值電壓為正弦波形,所獲得的輸出平滑且低次諧波少。按一定的規則對各脈沖的寬度進行調制,即可改變逆變電路輸出電壓的大小,也可改變輸出頻率。
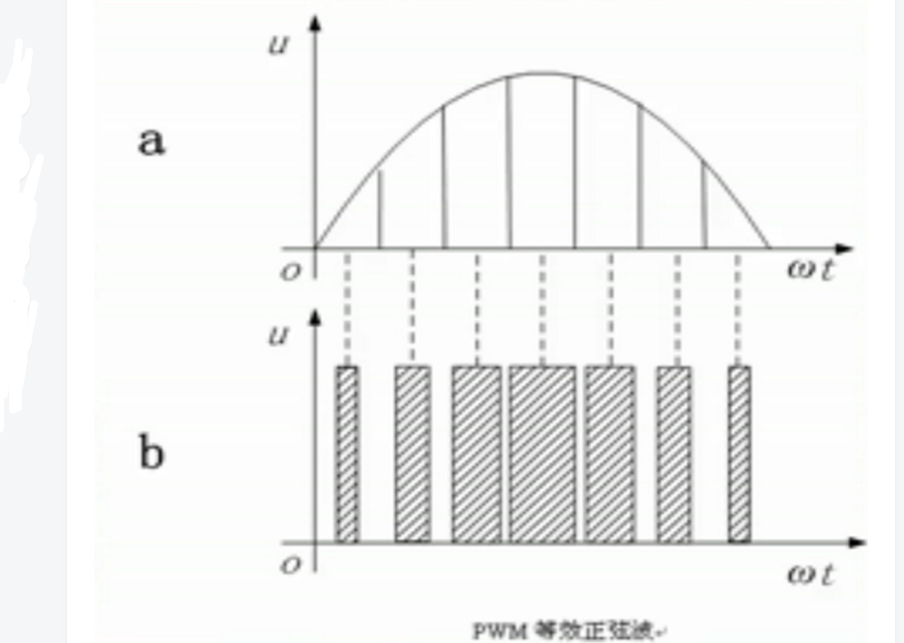
例如,把正弦半波波形分成N等份,就可把正弦半波看成由N個彼此相連的脈沖所組成的波形。這些脈沖寬度相等,都等于 π/n ,但幅值不等,且脈沖頂部不是水平直線,而是曲線,各脈沖的幅值按正弦規律變化。如果把上述脈沖序列用同樣數量的等幅而不等寬的矩形脈沖序列代替,使矩形脈沖的中點和相應正弦等分的中點重合,且使矩形脈沖和相應正弦部分面積(即沖量)相等,就得到一組脈沖序列,這就是PWM波形。可以看出,各脈沖寬度是按正弦規律變化的。根據沖量相等效果相同的原理,PWM波形和正弦半波是等效的。對于正弦的負半周,也可以用同樣的方法得到PWM波形。
在PWM波形中,各脈沖的幅值是相等的,要改變等效輸出正弦波的幅值時,只要按同一比例系數改變各脈沖的寬度即可,因此在交-直-交變頻器中,PWM逆變電路輸出的脈沖電壓就是直流側電壓的幅值。
根據上述原理,在給出了正弦波頻率,幅值和半個周期內的脈沖數后,PWM波形各脈沖的寬度和間隔就可以準確計算出來。按照計算結果控制電路中各開關器件的通斷,就可以得到所需要的PWM波形。
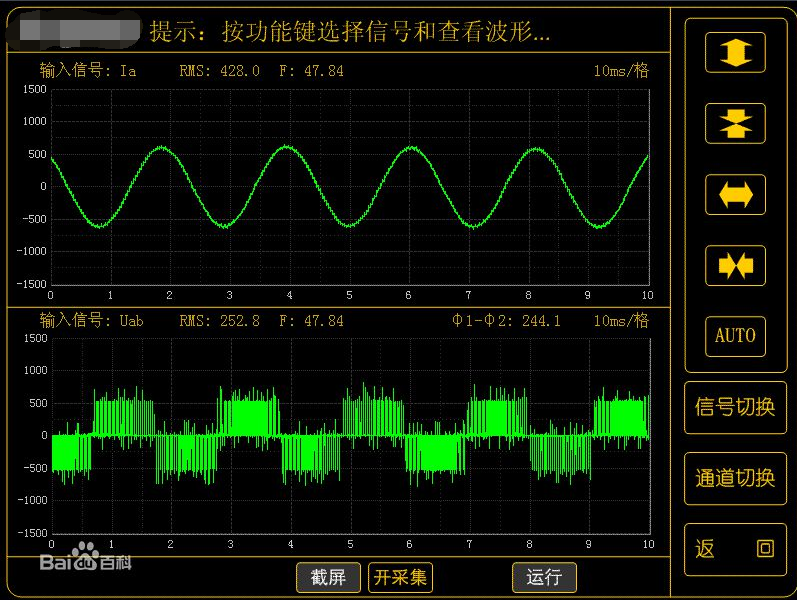
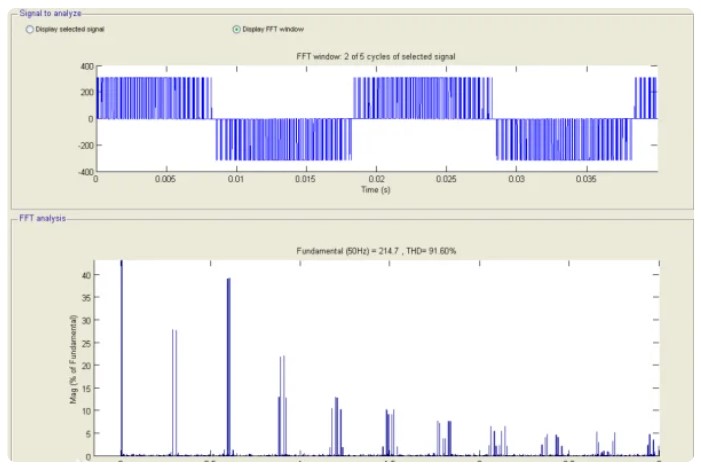
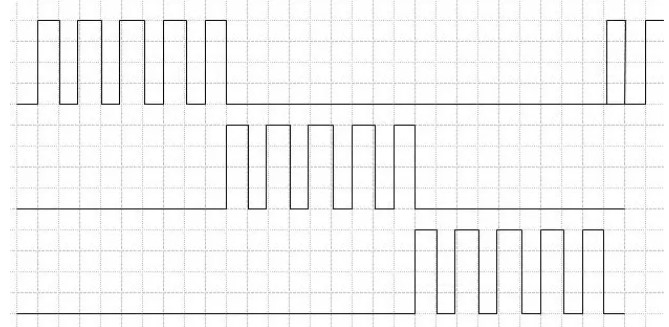
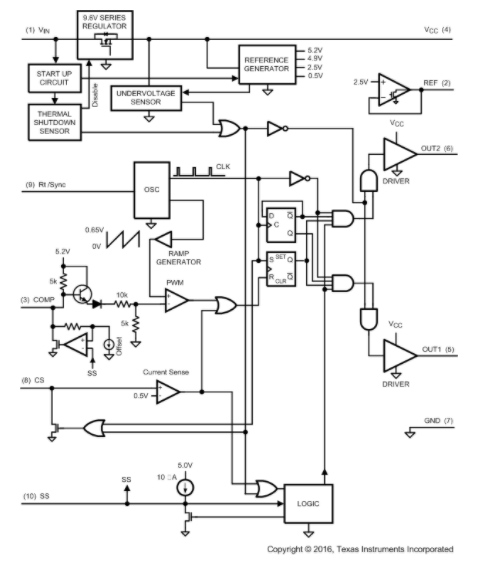
下圖為變頻器輸出的PWM波的實時波形。
特點:
簡單靈活 動態響應好
應用:
電動機控制(比如機器人內的電機控制,STM32中一個芯片可以控制很多電機)、功率控制、
轉換原理:
將模擬的信號(連續的曲線)分割,計算每塊地面積,轉換成數字信號的面積(不同的面積有不同的寬度,這也就是寬度調制這個名字的由來)
PWM輸出源和輸出數量
STM32除了TIM6,7(基本定時器),TIM1,8可以產生7路,共14路;通用定時器TIM2,3,4,5每個4路,共16路,所以STM32可以產生30路PWM輸出。
控制原理
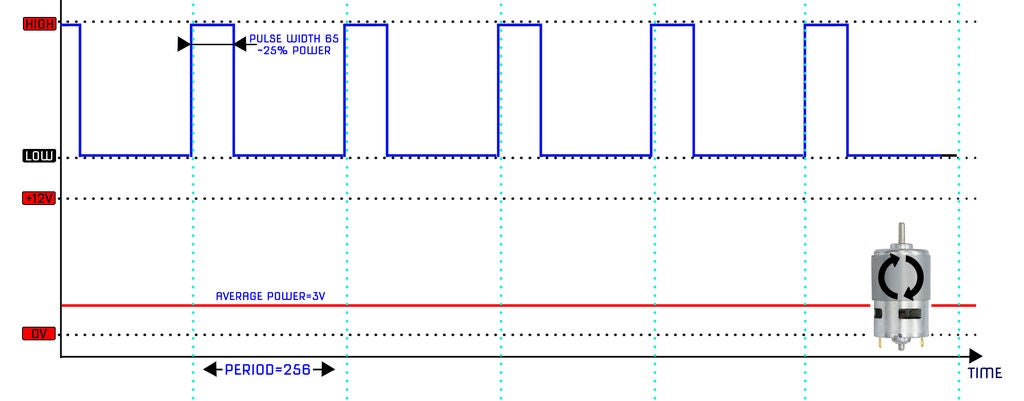
占空比:高電平持續時間占總時間的比例。
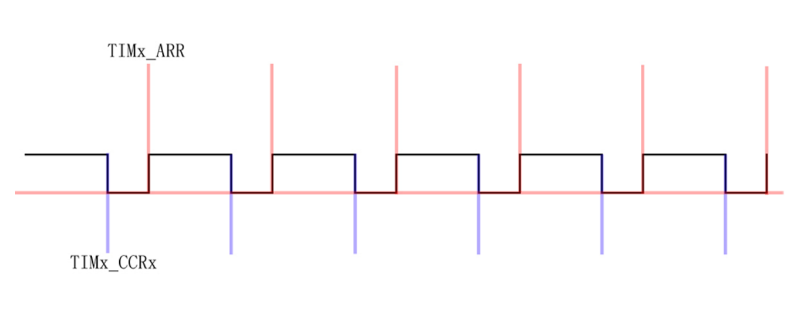
STM32 的PWM是TIMx_ARR寄存器確定頻率(周期)、由TIMx_CCRx寄存器確定占空比的信號
PWM模式:
脈沖寬度調制模式可以產生一個由 TIM1_ARR 寄存器確定頻率、由TIM1_CCRx寄存器確定占空比的信號。在 TIM1_CCMRx寄存器中的OCxM位寫入“110”(PWM 模式 1)或“111”(PWM 模式 2),【模式1,2選擇輸出的高低電平】能夠獨立地設置每個通道工作在 PWM模式,每個 OCx 輸出一路 PWM。必須通過設置 TIM1_CCMRx 寄存器 OCxPE 位使能相應的預裝載寄存器,最后還要設置 TIM1_CR1 寄存器的 ARPE 位使能自動重裝載的預裝載寄存器(在向上計數或中心對稱模式中)。
向上計數配置
當 TIM1_CR1 寄存器中的 DIR 位為低的時候執行向上計數。
在 PWM 模式 1,當 TIM1_CNT【計數器值】《 TIM1_CCRx 時 PWM 參考信號,OCxREF 為高,否則為低。如果 TIM1_CCRx中的比較值大于自動重裝載值(TIM1_ARR),則 OCxREF 保持為“1"。如果比較值為 0,則 OCxREF 保持為“0"。 圖 128 為 TIM1_ARR=8 時邊沿對齊的 PWM 波形實例
【不同的模式,1和0代表的電平高低不同,不是1是高,0是低】
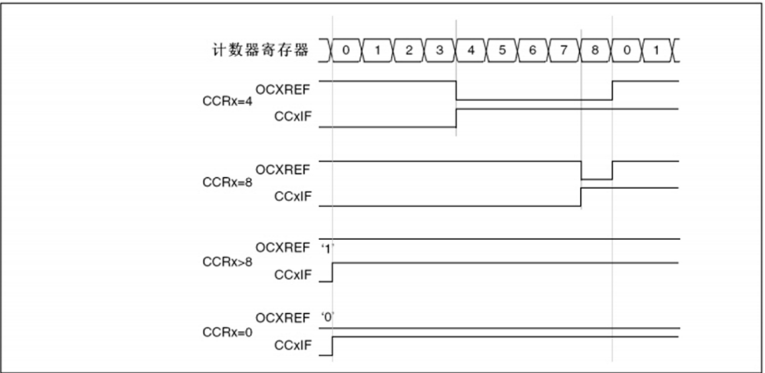
第一行是采用模式1的,模式2與模式1原理相同不過1和0代表的高低電平相反
還有向下計數模式(與向上技術模式相反),中央對齊模式,
最后,重點是要通過兩個寄存器TIMx_ARR寄存器,TIMx_CCRx寄存器控制















 工商網監
工商網監
評論