汽車CAN總線設(shè)計(jì)規(guī)范對(duì)于CAN節(jié)點(diǎn)的輸入電容有著嚴(yán)格的規(guī)定,每個(gè)節(jié)點(diǎn)不允許添加過多容性器件,否則節(jié)點(diǎn)組合到一起后,會(huì)導(dǎo)致總線波形畸變,通訊錯(cuò)誤增加。
2015-05-19 14:52:16 4365
4365 CAN總線設(shè)計(jì)規(guī)范對(duì)于CAN節(jié)點(diǎn)的輸入電壓閾值有著嚴(yán)格的規(guī)定,如果節(jié)點(diǎn)的輸入電壓閾值不符合規(guī)范,則在現(xiàn)場(chǎng)組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表 1所示,為測(cè)試標(biāo)準(zhǔn)“ISO 11898-2輸出電壓標(biāo)準(zhǔn)”。
2015-07-09 10:54:096517 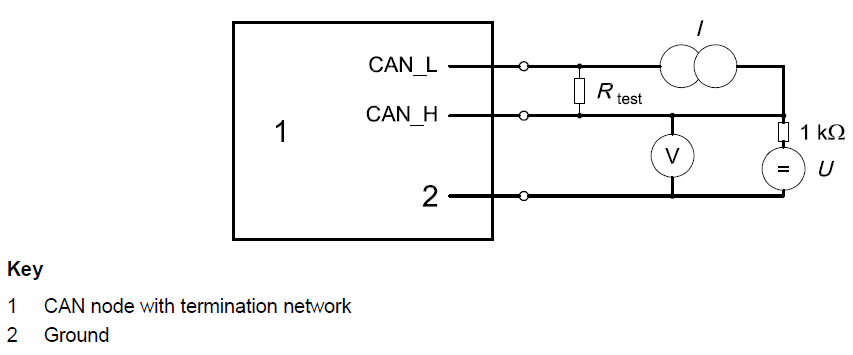
CAN總線設(shè)計(jì)規(guī)范對(duì)于CAN節(jié)點(diǎn)的差分電平位信號(hào)特征著嚴(yán)格的規(guī)定,如果節(jié)點(diǎn)的差分電平位信號(hào)特征不符合規(guī)范,則在現(xiàn)場(chǎng)組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障
2015-10-07 19:00:0911154 
CAN-bus網(wǎng)絡(luò)中原則上不允許兩個(gè)節(jié)點(diǎn)具有相同的ID段,但如果兩個(gè)節(jié)點(diǎn)ID段相同會(huì)怎樣呢?
2017-08-31 15:38:462299 在CAN-bus電路設(shè)計(jì)中,理論上收發(fā)器支持節(jié)點(diǎn)數(shù)最多可做到110個(gè),但實(shí)際應(yīng)用中往往達(dá)不到這個(gè)數(shù)量。今天我們就來談?wù)勅绾瓮ㄟ^合理的CAN-bus總線設(shè)計(jì),保證CAN網(wǎng)絡(luò)中的通訊的可靠性和節(jié)點(diǎn)數(shù)量。
2017-09-05 09:24:4920865 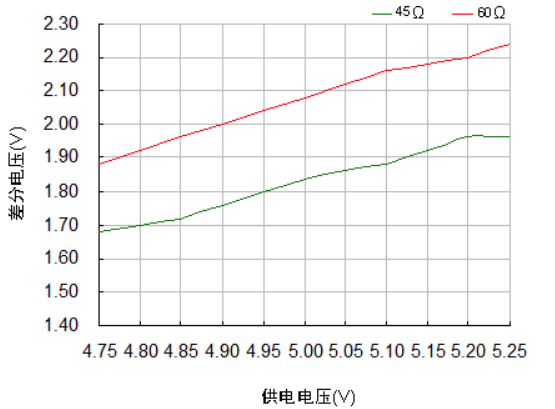
在CAN網(wǎng)絡(luò)中,所有節(jié)點(diǎn)的數(shù)據(jù)收發(fā)共享一條總線。當(dāng)面對(duì)未知的多節(jié)點(diǎn)CAN總線網(wǎng)絡(luò)時(shí),如何準(zhǔn)確分析各節(jié)點(diǎn)間的通信協(xié)議呢?
2018-02-27 09:29:2715232 
“ 總線關(guān)閉(bus off)是CAN節(jié)點(diǎn)比較重要的錯(cuò)誤處理機(jī)制。那么,在總線關(guān)閉狀態(tài)下,CAN節(jié)點(diǎn)的恢復(fù)流程是怎樣的?又該如何理解節(jié)點(diǎn)恢復(fù)流程的“快恢復(fù)”和“慢恢復(fù)”機(jī)制?本文將為大家詳細(xì)分析總線
2020-08-04 11:16:0013380 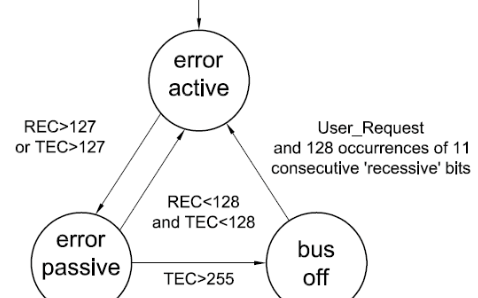
基于CAN總線的智能節(jié)點(diǎn)主程序流程如圖3所示,其發(fā)送方式通過查詢實(shí)現(xiàn),而發(fā)送數(shù)據(jù)方式通過中斷來實(shí)現(xiàn)。智能節(jié)點(diǎn)的主程序主要包括系統(tǒng)及外設(shè)初始化、CAN控制器初始化、數(shù)據(jù)發(fā)送、數(shù)據(jù)接收部分。
2021-03-13 12:34:073297 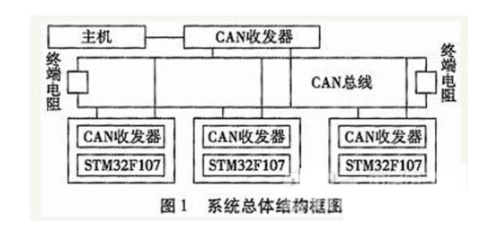
請(qǐng)教一下,CAN總線的問題,目前有個(gè)項(xiàng)目,總結(jié)點(diǎn)數(shù)大概在200個(gè)左右,一根總線的話總長(zhǎng)度在400米左右。看了兩款CAN總線驅(qū)動(dòng)器TJA1050T和MCP2551,最大節(jié)點(diǎn)數(shù)好像都只有110個(gè)左右
2015-07-18 16:26:33
請(qǐng)教一下,CAN總線的問題,目前有個(gè)項(xiàng)目,總結(jié)點(diǎn)數(shù)大概在200個(gè)左右,一根總線的話總長(zhǎng)度在400米左右。看了兩款CAN總線驅(qū)動(dòng)器TJA1050T和MCP2551,最大節(jié)點(diǎn)數(shù)好像都只有110個(gè)左右
2015-07-18 16:23:23
總線上的節(jié)點(diǎn)都可以決定自己是否需要總線上的數(shù)據(jù)。市場(chǎng)上常用的收發(fā)器(例如: VP230、TJA1040、TCAN337等)多為ISO11898標(biāo)準(zhǔn)。在此標(biāo)準(zhǔn)中,對(duì)于CAN的信號(hào)邏輯1和0的產(chǎn)生:當(dāng)
2019-07-01 19:20:56
CAN卡又叫做CAN總線分析儀,同星TOSUN智能科技又對(duì)它進(jìn)行細(xì)致分類,USBCAN卡,CAN總線網(wǎng)關(guān),CAN總線轉(zhuǎn)換器等等。主要功能就是起著通信協(xié)議轉(zhuǎn)換的作用,使設(shè)備之間傳輸無(wú)障礙,順利收發(fā)
2022-08-10 11:33:54
can節(jié)點(diǎn),理論上,STM32就可以接入100多個(gè)串口設(shè)備了。但是,只使用一個(gè)【can串口】模塊,是無(wú)法使串口設(shè)備與STM32通信的,因?yàn)閱纹瑱C(jī)都是TTL電平(0~3.3或5V),是無(wú)法與can總線(差分電平2.3V)通信的,所以必須有一個(gè)模塊能夠把單片機(jī)發(fā)出的信號(hào)轉(zhuǎn)換為CAN
2021-08-19 07:14:58
想申請(qǐng)Embedded Pi開發(fā)板,做個(gè)智能傳感器節(jié)點(diǎn)。項(xiàng)目描述:主要利用STM32單片機(jī)開發(fā)智能傳感器節(jié)點(diǎn),采用Embedded Pi開發(fā)板以及相關(guān)的單片機(jī)外圍器件構(gòu)成系統(tǒng),可以對(duì)不同類型的傳感器信號(hào)進(jìn)行采集,以多種傳輸方式與上位機(jī)進(jìn)行通信,如rs-485、CAN、無(wú)線等。從而構(gòu)建多用途傳感節(jié)點(diǎn)。
2015-11-24 09:33:21
基于32位ARM7的CAN節(jié)點(diǎn)設(shè)計(jì)
2013-03-31 10:48:13
,在標(biāo)準(zhǔn)格式中,短幀的字節(jié)數(shù)為8個(gè),因此傳輸時(shí)間短,受干擾的概率低,重新發(fā)數(shù)據(jù)幀的時(shí)間短,并且每幀信息都有CBC校驗(yàn)及其他檢錯(cuò)措施,這樣可以保證極低的數(shù)據(jù)出錯(cuò)率。CAN總線上的節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重時(shí),可以自動(dòng)
2018-11-13 10:38:08
智能節(jié)點(diǎn)硬件系統(tǒng)該怎樣去設(shè)計(jì)?智能節(jié)點(diǎn)軟件系統(tǒng)該怎樣去設(shè)計(jì)?
2021-05-14 06:04:23
基于Mega8單片機(jī)的CAN總線智能節(jié)點(diǎn)設(shè)計(jì)
2012-08-20 13:24:27
說明:這是我的畢業(yè)設(shè)計(jì),基于STM32的CAN總線通信節(jié)點(diǎn)設(shè)計(jì)。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
使用MCP2515以及TJA1050構(gòu)成CAN節(jié)點(diǎn)通信使用can收發(fā)器TJA1050芯片和CAN協(xié)議控制器MCP2515構(gòu)成CAN節(jié)點(diǎn),這里選用PIC16F877A型號(hào)單片機(jī)作為外部輸入連接裝置
2021-11-25 07:13:01
如何準(zhǔn)確測(cè)量CAN節(jié)點(diǎn)的信號(hào)邊沿參數(shù)?
2021-05-08 06:27:36
CANScope分析儀是什么?如何快速判斷CAN總線的故障節(jié)點(diǎn)?
2021-05-20 06:44:41
本文將給出一種采用通用微控制器(MCU)和獨(dú)立CAN控制器和收發(fā)器為核心的智能節(jié)點(diǎn),完成與汽車系統(tǒng)之間的通信和控制由數(shù)字信號(hào)處理器DSP2407為控制芯片的直流變轉(zhuǎn)速空調(diào)控制器的運(yùn)行,并且整個(gè)空調(diào)系統(tǒng)已成功地運(yùn)行在以燃料電池為動(dòng)力的試驗(yàn)汽車當(dāng)中。
2021-05-17 07:00:29
CAN總線是一種串行數(shù)據(jù)通信協(xié)議,其通信接口中集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對(duì)數(shù)據(jù)的成幀處理。CAN協(xié)議的一個(gè)最大特點(diǎn)是廢除了傳統(tǒng)的站地址編碼,而代之以對(duì)通信數(shù)據(jù)塊編碼,采用這種方法可使網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制,還可使不同的節(jié)點(diǎn)同時(shí)收到相同的數(shù)據(jù)。
2019-10-28 08:31:56
項(xiàng)目中需要用一款STM32的MCU做CAN中繼,關(guān)鍵是需要在接收到數(shù)據(jù)的同時(shí)需要轉(zhuǎn)發(fā),轉(zhuǎn)發(fā)用的CAN節(jié)點(diǎn)ID要與被轉(zhuǎn)發(fā)的CAN節(jié)點(diǎn)ID一致。因此有這樣的疑問。
2019-02-15 07:45:54
LonWorks智能通信節(jié)點(diǎn)的硬件結(jié)構(gòu)是如何構(gòu)成的? 怎樣去設(shè)計(jì)LonWorks智能通信節(jié)點(diǎn)的軟件結(jié)構(gòu)?
2021-05-25 06:55:00
作為構(gòu)建基于分析儀器網(wǎng)絡(luò)的基礎(chǔ),介紹了一種基于TMS32。。812的氣體分析儀器作為CAN總線網(wǎng)絡(luò)智能節(jié)點(diǎn)的設(shè)計(jì)方法。首先設(shè)計(jì)氣體分析儀器的結(jié)構(gòu)框圖和硬件接口電路,軟件設(shè)計(jì)部
2009-03-18 10:37:48 29
29 文章介紹了一種基于CAN 總線的煤礦瓦斯報(bào)警節(jié)點(diǎn)系統(tǒng)的設(shè)計(jì),給出了基于CAN 總線的智能監(jiān)控節(jié)點(diǎn)網(wǎng)絡(luò)的一般結(jié)構(gòu),著重介紹了節(jié)點(diǎn)系統(tǒng)的軟硬件設(shè)計(jì)。關(guān)鍵詞:煤礦; 瓦斯傳感器;
2009-03-30 16:40:4647 基于P87 C591的CAN總線系統(tǒng)智能節(jié)點(diǎn)設(shè)計(jì)Design of CAN System Intelligent Node Based on P87C591
給出了基于帶CAN控制器的單片8位微控制器P87C591的智能節(jié)點(diǎn)的硬件電路及軟件結(jié)構(gòu),詳細(xì)介
2009-03-30 16:55:4945 CAN 總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站。智能節(jié)點(diǎn)能通過編程設(shè)置工作方式、ID地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN 通信控制器組成。本文介紹這類節(jié)點(diǎn)的硬
2009-05-13 16:11:3952 介紹CAN 總線控制器SJA1000; 給出其在CAN 總線系統(tǒng)節(jié)點(diǎn)中的應(yīng)用方法、節(jié)點(diǎn)電路原理圖及初始化程序; 針對(duì)應(yīng)用SJA1000 容易出現(xiàn)的問題進(jìn)行了解說。
2009-05-13 16:43:3262 介紹一種以8051 微控制器和82527 獨(dú)立CAN 總線控制器為核心組成的CAN 總線智能傳感器節(jié)點(diǎn)的設(shè)計(jì)方法, 并給出其硬件原理圖和初始化程序。
2009-05-14 15:59:5414 CAN 總線作為一種現(xiàn)場(chǎng)總線,應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節(jié)點(diǎn)設(shè)計(jì)方法,并對(duì)軟硬件進(jìn)行了相應(yīng)的說明。關(guān)鍵詞:CAN 總線,SJA1000,單片機(jī)CAN(C
2009-05-25 13:26:1259 本文簡(jiǎn)單介紹了目前CAN網(wǎng)冗余的幾種方式,提出了網(wǎng)狀冗余的全新冗余方式;給出了應(yīng)用在電源模塊控制系統(tǒng)中,基于具有ARM7TDMI內(nèi)核的32位微控制器的CAN總線網(wǎng)狀冗余節(jié)點(diǎn)設(shè)計(jì)方案
2009-05-26 16:02:1910 現(xiàn)場(chǎng)總線是目前自動(dòng)化技術(shù)發(fā)展的一個(gè)熱點(diǎn)。本文介紹基于CAN總線的分布式控制網(wǎng)絡(luò)系統(tǒng)的設(shè)計(jì)方法,給出了Intel 80C196KC+SJA1000和PIC16F877+MCP2510兩種典型的CAN總線智能節(jié)點(diǎn)的硬件電
2009-06-01 10:33:0124 現(xiàn)場(chǎng)總線是目前自動(dòng)化技術(shù)發(fā)展的一個(gè)熱點(diǎn)。本文介紹基于CAN 總線的分布式控制網(wǎng)絡(luò)系統(tǒng)的設(shè)計(jì)方法,給出了Intel 80C196KC+SJA1000 和PIC16F877+MCP2510兩種典型的CAN總線智能節(jié)點(diǎn)的硬件電路
2009-06-12 15:51:0521 CAN總線具有配置靈活、應(yīng)用范圍廣的特點(diǎn),C8051f040單片機(jī)功能強(qiáng)大,集成了CAN總線控制器。本文提出了一種基于C8051f040的CAN總線系統(tǒng)智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了相應(yīng)的硬件和軟件
2009-06-17 11:18:4723 本文給出了一種由MCP250505 構(gòu)成的無(wú)需外加CPU 的CAN 總線節(jié)點(diǎn)的設(shè)計(jì)方案,介紹了CAN 總線網(wǎng)絡(luò)節(jié)點(diǎn)的硬件設(shè)計(jì)和軟件設(shè)計(jì),并對(duì)MCP25050 的特性以及相關(guān)協(xié)議作了詳細(xì)分析。實(shí)驗(yàn)表明,
2009-06-22 08:41:4319 CAN總線上的智能節(jié)點(diǎn)是網(wǎng)絡(luò)上報(bào)文的接收和發(fā)送站,一般由單片機(jī)和可編程的CAN通信控制器組成。本文介紹了一種新型的獨(dú)立CAN 通信控制器MCP2515;給出其在CAN總線系統(tǒng)智能節(jié)
2009-06-26 10:38:51140 討論了現(xiàn)場(chǎng)總線技術(shù)和Web 技術(shù)的優(yōu)越性,提出了基于Web 的CAN 網(wǎng)絡(luò)儲(chǔ)油罐群遠(yuǎn)程監(jiān)控系體系結(jié)構(gòu)并給出了其實(shí)現(xiàn)原理,分析了基于CAN 的智能節(jié)點(diǎn)軟硬件設(shè)計(jì)思想,重點(diǎn)研究了基于WebS
2009-06-29 08:24:4110 針對(duì)潛水電機(jī)工作環(huán)境復(fù)雜、故障率高、影響參數(shù)多等特點(diǎn),本文介紹了一種基于CAN總線的潛水電機(jī)分布式監(jiān)控系統(tǒng)的設(shè)計(jì)方案;給出了智能監(jiān)控節(jié)點(diǎn)的硬件電路、軟件軟初始化
2009-07-01 15:00:4115 介紹了一種基于CAN 總線、采用雙CPU 結(jié)構(gòu)的智能控制節(jié)點(diǎn)的設(shè)計(jì),說明了該智能控制節(jié)點(diǎn)的工作原理并詳細(xì)闡述了其所具備的功能、硬件組成和軟件實(shí)現(xiàn)。此控制節(jié)點(diǎn)結(jié)構(gòu)新穎,采
2009-07-08 15:19:5814 本文在將嵌入式實(shí)時(shí)操作系統(tǒng)μCOS-II 移植到S3C44B0 的基礎(chǔ)上,將CAN 總線通訊程序作為一個(gè)模塊植入μCOS-II 之中,形成一個(gè)CAN 總線智能節(jié)點(diǎn)。闡述了CAN 總線智能節(jié)點(diǎn)的設(shè)計(jì)思想,硬件
2009-08-06 10:35:3314 本文介紹了基于CAN 總線的嵌入式控制系統(tǒng)底層網(wǎng)絡(luò)中的現(xiàn)場(chǎng)智能節(jié)點(diǎn)的設(shè)計(jì),研究了其網(wǎng)絡(luò)體系結(jié)構(gòu)及功能,并對(duì)智能節(jié)點(diǎn)的通信功能進(jìn)行了詳細(xì)分析。基于現(xiàn)場(chǎng)總線的控制系統(tǒng)
2009-08-07 08:52:5622 CAN(Control Area Network)總線技術(shù)是一種支持分布式實(shí)時(shí)控制的高安全性的串行總線。本文對(duì)CAN 控制網(wǎng)絡(luò)中重要的現(xiàn)場(chǎng)設(shè)備--智能節(jié)點(diǎn)的具體實(shí)現(xiàn)進(jìn)行的研究,主要包括智能節(jié)點(diǎn)的軟件
2009-08-14 09:07:1811 該文介紹了CAN總線的基本特點(diǎn)和智能節(jié)點(diǎn)數(shù)字量及開關(guān)量輸入輸出的設(shè)計(jì)實(shí)現(xiàn),并給出了軟件編制的方法。隨著計(jì)算機(jī)科學(xué)的發(fā)展和以其為核心的 4C技術(shù)(計(jì)算機(jī)技術(shù)、自
2009-08-18 09:00:5313 關(guān)鍵詞 LM3S2016、CTM系列隔離CAN收發(fā)器摘 要 基于32位Luminary ARM的CAN節(jié)點(diǎn)設(shè)計(jì)
2009-11-07 14:16:4113 CAN總線是一種應(yīng)用廣泛的實(shí)時(shí)性現(xiàn)場(chǎng)總線,提出了基于具有ARM7TDMI內(nèi)核的32位微控制器的CAN總線智能節(jié)點(diǎn)設(shè)計(jì)方案。詳細(xì)介紹了ARM控制器(LPC2294)的特點(diǎn)、智能節(jié)點(diǎn)的結(jié)構(gòu)以及系統(tǒng)軟
2009-12-01 14:27:3518 CAN總線是一種應(yīng)用極為普及的現(xiàn)場(chǎng)總線。文中提出了一種CAN總線通信接口的設(shè)計(jì)方案。CAN總線智能節(jié)點(diǎn)用單片機(jī)AT89S52和SJA1000控制器為核心組成。分別從硬件電路設(shè)計(jì)和SJA1000軟件
2010-01-25 15:04:2251 基于CAN技術(shù)的DeviceNet是一種低成本的通信總線,它將各種工業(yè)設(shè)備連接到網(wǎng)絡(luò)。離散量輸入模塊是一個(gè)采用DeviceNet總線進(jìn)行通信的離散量輸入節(jié)點(diǎn)。主要闡述了基于DevieeNet智能節(jié)點(diǎn)
2010-04-27 08:32:3928 摘要:CAN總線上的節(jié)點(diǎn)是網(wǎng)絡(luò)上的信息接收和發(fā)送站;智能節(jié)點(diǎn)能通過編程設(shè)置工作方式、ID、地址、波特率等參數(shù)。它主要由單片機(jī)和可編程的CAN通信控制器組成。本文介紹這類節(jié)
2010-12-20 22:18:4044 針對(duì)當(dāng)前CAN總線及J1939協(xié)議在汽車電子中的廣泛應(yīng)用,給出一種通過配置在低成本CAN I/O擴(kuò)展器MCP2502X/05X器件上實(shí)現(xiàn)J1939協(xié)議的CAN總線節(jié)點(diǎn)的設(shè)計(jì)方法。詳細(xì)介紹擴(kuò)展節(jié)點(diǎn)的配置方法和
2010-12-29 18:08:4528 ?摘要:介紹了一種用單片機(jī)ADμC812、CAN總線控制器SJA1000和CAN總線驅(qū)動(dòng)器POA82C250組成的CAN總線智能節(jié)點(diǎn)的設(shè)計(jì)方案,給出了該節(jié)點(diǎn)的硬件結(jié)構(gòu)和軟件設(shè)計(jì)方法,同時(shí)介紹
2006-03-11 11:47:39949 
SPMC65單片機(jī)在CAN總線智能節(jié)點(diǎn)中的應(yīng)用
本文主要介紹如何使用SPMC65P2404A單片機(jī)設(shè)計(jì)開發(fā)CAN總線
2009-09-19 10:45:14700 
基于CAN總線的溫度檢測(cè)節(jié)點(diǎn)設(shè)計(jì)
在對(duì)電子點(diǎn)火模塊的測(cè)試中,為了模擬電子點(diǎn)火系統(tǒng)的真實(shí)工況,電子點(diǎn)火模塊往往被置于高于常溫的環(huán)境下進(jìn)行電子點(diǎn)火實(shí)驗(yàn),
2010-01-12 11:13:132061 
本文重點(diǎn)就模擬量輸入模塊和開關(guān)量輸入模塊的設(shè)計(jì),采用具有CAN接口的C8051F550單片機(jī)作為系統(tǒng)設(shè)計(jì)的從節(jié)點(diǎn),用來采集模擬量和開關(guān)量,實(shí)現(xiàn)與上位機(jī)中央控制器的通信。
2011-08-11 11:03:001806 
基于對(duì)CAN 總線控制器的功能分析, 并應(yīng)用Verilog語(yǔ)言進(jìn)行軟件設(shè)計(jì), 從而實(shí)現(xiàn)CAN節(jié)點(diǎn)之間的通信功能。
2012-04-28 09:56:5413818 
CAN總線是一種應(yīng)用廣泛的實(shí)時(shí)性現(xiàn)場(chǎng)總線。本文提出了一種基于具有ARM7DMI內(nèi)核的32位ARM微控制器LPC2294的CAN總線智能節(jié)點(diǎn)設(shè)計(jì)方案。詳細(xì)介紹了ARM微控制器LPC2294和隔離CAN收發(fā)器CTM1050T的特
2012-05-29 09:27:063583 
本文主要介紹CAN總線智能節(jié)點(diǎn)的簡(jiǎn)單設(shè)計(jì)。智能節(jié)點(diǎn)由89C5l型單片機(jī)、SJA1000型總線控制器、82C250型總線驅(qū)動(dòng)器及PC構(gòu)成。在實(shí)際應(yīng)用中可以連接不同的傳感器件,完成數(shù)據(jù)的采集和傳輸。
2012-09-06 17:07:088509 
應(yīng)用51單片機(jī)為控制核心結(jié)合其他的器件設(shè)計(jì)了一種能連接于CAN總線上的智能節(jié)點(diǎn)。通過單片機(jī)控制CAN總線控制器SJA1000,并進(jìn)一步通過CAN總線收發(fā)器PCA82C250,實(shí)現(xiàn)該智能節(jié)點(diǎn)與CAN總線的
2013-01-10 16:54:57120 本文介紹了CAN總線的發(fā)展歷史,并對(duì)其優(yōu)點(diǎn)及主要技術(shù)指標(biāo)進(jìn)行了詳述,最后就其具體應(yīng)用給出了實(shí)例。
2015-11-19 10:26:167 CAN總線上的智能節(jié)點(diǎn)是網(wǎng)絡(luò)上報(bào)文的接收和發(fā)送站一般由單片機(jī)和可編程的通信控制器組成 本文介紹了一種新型的獨(dú)立CAN 通信控制器給出其在CAN 總線系統(tǒng)智能節(jié)點(diǎn)中的一個(gè)應(yīng)用實(shí)例" 硬件設(shè)計(jì)給出了節(jié)點(diǎn)的電路原理圖" 軟件設(shè)計(jì)給出了系統(tǒng)程序的設(shè)計(jì)流程圖"并對(duì)其作了簡(jiǎn)要的說明。
2016-04-01 09:41:020 本書首先簡(jiǎn)要敘述了現(xiàn)場(chǎng)總線技術(shù)的基礎(chǔ)——計(jì)算機(jī)網(wǎng)絡(luò);其后的內(nèi)容覆蓋了CAN技術(shù)的國(guó)際標(biāo)準(zhǔn)、幾類有代表性的CAN器件、CAN智能節(jié)點(diǎn)的硬件和軟件設(shè)計(jì)(包括在單片機(jī)和PC機(jī)上)、組網(wǎng)中的CAN網(wǎng)關(guān)和網(wǎng)橋
2016-04-05 13:43:280 本書首先簡(jiǎn)要敘述了現(xiàn)場(chǎng)總線技術(shù)的基礎(chǔ)——計(jì)算機(jī)網(wǎng)絡(luò);其后的內(nèi)容覆蓋了CAN技術(shù)的國(guó)際標(biāo)準(zhǔn)、幾類有代表性的CAN器件、CAN智能節(jié)點(diǎn)的硬件和軟件設(shè)計(jì)(包括在單片機(jī)和PC機(jī)上)、組網(wǎng)中的CAN網(wǎng)關(guān)和網(wǎng)橋
2016-04-05 13:48:040 基于PIC18F458的CAN總線節(jié)點(diǎn)開發(fā)_張逸群。
2016-05-06 11:29:316 CAN總線通訊已經(jīng)從汽車電子行業(yè)逐漸向各行各業(yè)鋪開使用了,例如軌道交通、礦井監(jiān)控等。在設(shè)計(jì)CAN總線接口電路時(shí)需要注意,
對(duì)于提高CAN總線節(jié)點(diǎn)的可靠性而言,離不開隔離、總線阻抗匹配、總線保護(hù)等,在設(shè)計(jì)CAN節(jié)點(diǎn)時(shí)要注意這些點(diǎn)以提高總線電路可靠性和安全性。
2016-06-08 11:41:272862 下面小編將以圖文的方式告訴大家如何模擬CAN總線節(jié)點(diǎn),不足之處還望大神們積極補(bǔ)充。
2017-09-21 14:44:4312 總線式的網(wǎng)絡(luò)通信有缺點(diǎn):只能夠一條直線或曲線,不能夠開叉,不能夠環(huán)形閉合。開叉布線的問題可以通過加HUB來解決。本文介紹的是如何通過CAN的HUB來實(shí)現(xiàn)3個(gè)CAN節(jié)點(diǎn)的環(huán)形網(wǎng)絡(luò)通信。
2017-10-05 18:36:277996 
在CAN-bus電路設(shè)計(jì)中,理論上收發(fā)器支持節(jié)點(diǎn)數(shù)最多可做到110個(gè),但實(shí)際應(yīng)用中往往達(dá)不到這個(gè)數(shù)量。這里我們談?wù)勅绾瓮ㄟ^合理的CAN-bus總線設(shè)計(jì),保證CAN網(wǎng)絡(luò)中的通訊的可靠性和節(jié)點(diǎn)
2017-11-12 10:42:012 CAN-bus網(wǎng)絡(luò)中原則上不允許兩個(gè)節(jié)點(diǎn)具有相同的ID段,但如果兩個(gè)節(jié)點(diǎn)ID段相同會(huì)怎樣呢? 實(shí)驗(yàn)前,我們首先要對(duì)CAN報(bào)文的結(jié)構(gòu)組成、仲裁原理有清晰的認(rèn)識(shí)。 一、CAN報(bào)文結(jié)構(gòu) 目前使用最廣
2017-11-12 10:52:428 CAN節(jié)點(diǎn)的設(shè)計(jì)主要是CAN通信控制器與微處理器之間、CAN總線收發(fā)器與物理總線之間的電路的設(shè)計(jì)。微控制器主要負(fù)責(zé)CAN控制器的初始化,進(jìn)行與CAN控制器的數(shù)據(jù)傳遞,并按照預(yù)定的程序進(jìn)行處理;CAN
2018-04-10 09:25:001201 
技術(shù)的國(guó)際標(biāo)準(zhǔn)、幾類有代表性的CAN器件、CAN智能節(jié)點(diǎn)的硬件和軟件設(shè)計(jì)(包括在單片機(jī)和PC機(jī)上)、組網(wǎng)中的CAN網(wǎng)關(guān)和網(wǎng)橋的設(shè)計(jì)、CAN的應(yīng)用技術(shù)實(shí)例;最后較詳細(xì)地介紹了基于CAN的網(wǎng)絡(luò)高層協(xié)議中最流行的CANopen和DeviceNet以及時(shí)間觸發(fā)CAN(TTCAN)的基本原理及其主要結(jié)構(gòu)。
2018-11-12 10:35:572606 
嵌入式CAN智能節(jié)點(diǎn)以PIC16F874單片機(jī)作為嵌入式微控制器,以MCP2510作為 CAN控制器,以PCA82C250作為CAN收發(fā)器,具有現(xiàn)場(chǎng)/遠(yuǎn)程控制功能。根據(jù)用戶的需求,嵌入式CAN智能
2020-03-03 08:02:002214 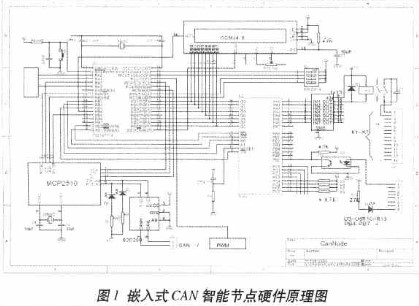
CAN智能節(jié)點(diǎn)的設(shè)計(jì)涉及2個(gè)方面:需要實(shí)現(xiàn)的功能;如何實(shí)現(xiàn)CAN通信。因此本文基于AT91RM9200和MCP2510提出的CAN智能節(jié)點(diǎn)的設(shè)計(jì)框架如圖1所示。在此首先介紹主要芯片的特性,然后再說明智能節(jié)點(diǎn)的設(shè)計(jì)原理。
2018-08-30 09:48:294248 MCP25l0是Microchip公司生產(chǎn)的一種獨(dú)立的可編程CAN控制器芯片。本文將介紹新型的獨(dú)立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點(diǎn)中的應(yīng)用實(shí)例。
2019-09-26 08:01:002804 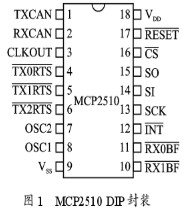
CAN總線設(shè)計(jì)規(guī)范對(duì)于CAN節(jié)點(diǎn)的信號(hào)邊沿各項(xiàng)參數(shù)都有著嚴(yán)格的規(guī)定,如果不符合規(guī)范,則在現(xiàn)場(chǎng)組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點(diǎn)間出現(xiàn)通信故障。具體要求如表 1所示,為測(cè)試標(biāo)準(zhǔn)“GMW3122信號(hào)邊沿標(biāo)準(zhǔn)”。
2019-05-17 15:18:10986 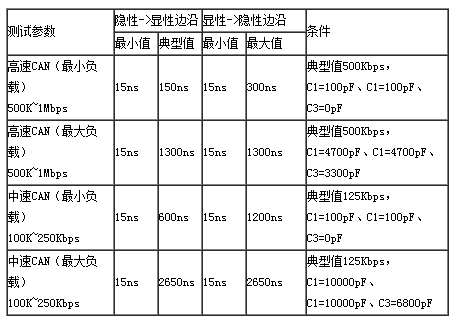
本文提出了以CAN總線構(gòu)成現(xiàn)場(chǎng)控制網(wǎng)絡(luò)。CAN總線的通信速率最高可達(dá)1 Mbps/40 m,掛接的設(shè)備可達(dá)110個(gè)。另外信號(hào)的傳輸采用短幀結(jié)構(gòu),這樣傳輸時(shí)間短,受干擾的概率低。并且一旦網(wǎng)絡(luò)中某個(gè)節(jié)點(diǎn)
2020-03-16 10:30:34906 
控制器局域網(wǎng)CAN(Controller Aera Network)是德國(guó)Bosch公司在80年代初為解決現(xiàn)代汽車中大量的控制與測(cè)試儀器之間的數(shù)據(jù)交換而提出的一種串行數(shù)據(jù)通信協(xié)議。他是多主總線,通信
2020-04-04 11:14:00968 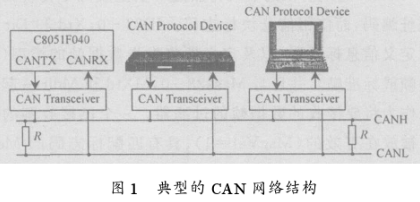
一種由8051單片機(jī)和82527獨(dú)立CAN總線控制器為核心構(gòu)成的智能節(jié)點(diǎn)電路,在普通傳感器基礎(chǔ)上形成可接收8路模擬量輸入和智能傳感器節(jié)點(diǎn)。
2020-04-19 11:22:001645 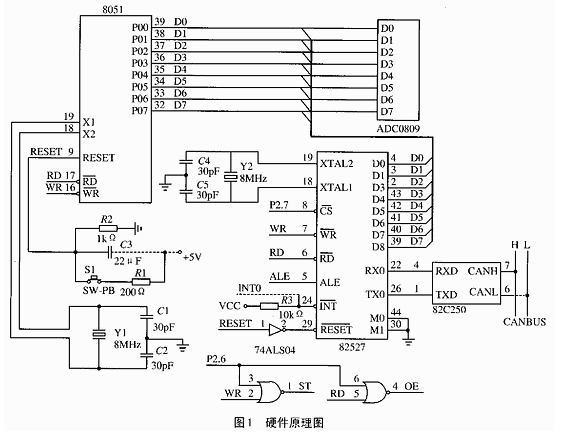
CAN總線節(jié)點(diǎn)軟件的設(shè)計(jì)與實(shí)現(xiàn)說明。
2021-04-19 16:59:1020 MCP2510是Microchip公司生產(chǎn)的一種獨(dú)立的可編程CAN控制器芯片。本文將介紹新型的獨(dú)立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點(diǎn)中的應(yīng)用實(shí)例。
2021-06-23 15:16:333451 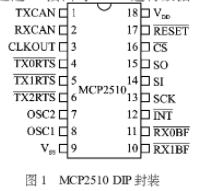
CAN一致性測(cè)試在于縮小CAN總線節(jié)點(diǎn)間的差異,提高總線抗干擾能力,從而保障設(shè)備CAN網(wǎng)絡(luò)系統(tǒng)的穩(wěn)定。因此,CAN節(jié)點(diǎn)一致性測(cè)試就顯得尤為重要,本文將重點(diǎn)對(duì)幾個(gè)測(cè)試項(xiàng)進(jìn)行講解。 零部件CAN節(jié)點(diǎn)質(zhì)量
2021-08-23 11:03:334477 CAN節(jié)點(diǎn)的穩(wěn)定性、可靠性和安全性得益于其強(qiáng)大的錯(cuò)誤管理機(jī)制。那么,CAN節(jié)點(diǎn)為什么能感知錯(cuò)誤?又是如何響應(yīng)錯(cuò)誤?您是否能清晰地想象出這一過程?本文將為大家詳細(xì)分析CAN節(jié)點(diǎn)錯(cuò)誤管理的工作
2021-10-20 09:49:232013 
使用MCP2515以及TJA1050構(gòu)成CAN節(jié)點(diǎn)通信使用can收發(fā)器TJA1050芯片和CAN協(xié)議控制器MCP2515構(gòu)成CAN節(jié)點(diǎn),這里選用PIC16F877A型號(hào)單片機(jī)作為外部輸入連接裝置
2021-11-16 20:21:0541 說明:這是我的畢業(yè)設(shè)計(jì),基于STM32的CAN總線通信節(jié)點(diǎn)設(shè)計(jì)。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-12-24 19:30:1046 在低功耗 Bluetooth? PEPS 系統(tǒng)中添加 CAN 節(jié)點(diǎn)
2022-10-31 08:24:011 本文介紹了評(píng)估"控制器局域網(wǎng)"(CAN)收發(fā)器的正確系統(tǒng)級(jí)測(cè)試方法。通過展示在多CAN節(jié)點(diǎn)系統(tǒng)中執(zhí)行不同CAN節(jié)點(diǎn)之間的數(shù)據(jù)傳輸時(shí)如何避免實(shí)際數(shù)據(jù)傳輸問題,解釋了此種測(cè)試方法
2023-06-10 16:50:34712 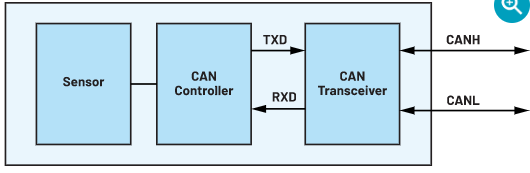
一般來說,CAN總線2可以掛載的節(jié)點(diǎn)數(shù)量10到110之間。下面采用了64個(gè)節(jié)點(diǎn)測(cè)試數(shù)據(jù)傳輸?shù)男阅埽霈F(xiàn)的問題如下。
2023-06-14 09:42:231191 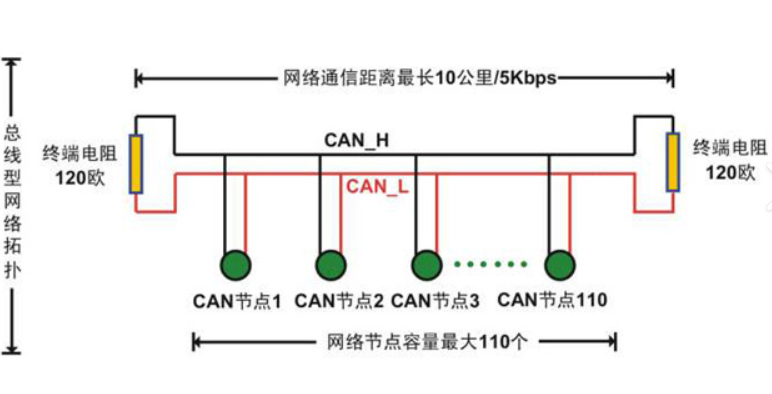
點(diǎn)擊上方 藍(lán)字 關(guān)注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機(jī)和外圍擴(kuò)展芯片, 給出了CAN 總線通信節(jié)點(diǎn)的詳細(xì)設(shè)計(jì)方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設(shè)計(jì)實(shí)現(xiàn)通信
2023-06-18 11:15:011796 本文介紹了評(píng)估“控制器局域網(wǎng)”(CAN)收發(fā)器的正確系統(tǒng)級(jí)測(cè)試方法。通過展示在多CAN節(jié)點(diǎn)系統(tǒng)中執(zhí)行不同CAN節(jié)點(diǎn)之間的數(shù)據(jù)傳輸時(shí)如何避免實(shí)際數(shù)據(jù)傳輸問題,解釋了此種測(cè)試方法的優(yōu)越之處。閱讀本文后,讀者將對(duì)CAN系統(tǒng)有更好的了解,并能夠?yàn)樘囟ǖ亩?b class="flag-6" style="color: red">節(jié)點(diǎn)CAN系統(tǒng)選擇合適的CAN收發(fā)器。
2023-07-10 09:56:46662 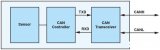
電子發(fā)燒友網(wǎng)站提供《基于SJA1000的CAN節(jié)點(diǎn)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-13 11:40:370 電子發(fā)燒友網(wǎng)站提供《基于ARM和CAN總線的電氣信號(hào)采集節(jié)點(diǎn)的設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-13 11:31:031 電子發(fā)燒友網(wǎng)站提供《基于單片機(jī)CAN總線AO智能節(jié)點(diǎn)設(shè)計(jì).ppt》資料免費(fèi)下載
2023-10-20 10:02:070 電子發(fā)燒友網(wǎng)站提供《基于CAN總線的智能節(jié)點(diǎn)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-20 14:44:320 電子發(fā)燒友網(wǎng)站提供《機(jī)載CAN總線節(jié)點(diǎn)的模塊化設(shè)計(jì)與實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-31 10:15:400 電子發(fā)燒友網(wǎng)站提供《基于CAN總線EPB駐車電流采集節(jié)點(diǎn)的設(shè)計(jì)與研究.pdf》資料免費(fèi)下載
2023-11-08 11:13:220 CAN總線最大能夠帶多少節(jié)點(diǎn)?CANFD相對(duì)于CAN2.0有哪些差異呢? CAN總線最大能夠帶多少節(jié)點(diǎn)? CAN總線是一種廣泛應(yīng)用于汽車領(lǐng)域的多主機(jī)串行通信總線。CAN總線使用CSMA/CR
2024-01-31 14:08:59543 找到CAN總線(故障)節(jié)點(diǎn)的三種辦法? CAN總線是現(xiàn)代汽車電子系統(tǒng)中常見的通信協(xié)議,用于車載電子設(shè)備之間的數(shù)據(jù)傳輸。在汽車的CAN總線系統(tǒng)中,每個(gè)節(jié)點(diǎn)都扮演著重要的角色。然而,由于各種原因,有時(shí)候
2024-02-02 10:35:10457 一般來說,大部分CAN總線連接的節(jié)點(diǎn)數(shù)量在10個(gè)到100個(gè)之間。
2024-02-19 14:27:57439
 電子發(fā)燒友App
電子發(fā)燒友App


 并進(jìn)一步構(gòu)成自動(dòng)化系統(tǒng),從而實(shí)現(xiàn)基本的控制、補(bǔ)償、計(jì)算、參數(shù)修改、報(bào)警、顯示、監(jiān)控、優(yōu)化及控管一體化的綜合自動(dòng)化功能。
并進(jìn)一步構(gòu)成自動(dòng)化系統(tǒng),從而實(shí)現(xiàn)基本的控制、補(bǔ)償、計(jì)算、參數(shù)修改、報(bào)警、顯示、監(jiān)控、優(yōu)化及控管一體化的綜合自動(dòng)化功能。

 MSP430將寫數(shù)據(jù)到MCP2510的發(fā)送緩存并控制其發(fā)送,此后,在接收緩存收到數(shù)據(jù)后,INT引腳將產(chǎn)生低電平中斷以通知MSP430,MSP430響應(yīng)中斷后將讀取數(shù)據(jù),并和發(fā)送的數(shù)據(jù)進(jìn)行比較,以驗(yàn)證程序的可行性。需要注意的是,無(wú)論是對(duì)MCP2510的讀還是寫,都必須使它的CS引腳處于低電平。
MSP430將寫數(shù)據(jù)到MCP2510的發(fā)送緩存并控制其發(fā)送,此后,在接收緩存收到數(shù)據(jù)后,INT引腳將產(chǎn)生低電平中斷以通知MSP430,MSP430響應(yīng)中斷后將讀取數(shù)據(jù),并和發(fā)送的數(shù)據(jù)進(jìn)行比較,以驗(yàn)證程序的可行性。需要注意的是,無(wú)論是對(duì)MCP2510的讀還是寫,都必須使它的CS引腳處于低電平。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論