") 伺服電機(jī)的轉(zhuǎn)速范圍
伺服電機(jī)的轉(zhuǎn)速范圍
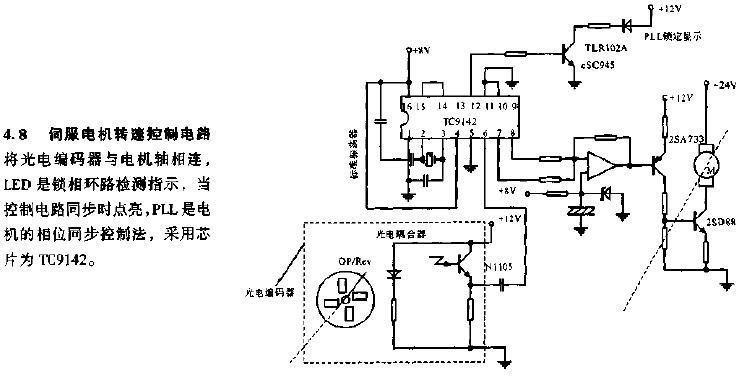
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動(dòng),驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(線數(shù)),是一個(gè)典型閉環(huán)反饋系統(tǒng),減速齒輪組由電機(jī)驅(qū)動(dòng),其終端(輸出端)帶動(dòng)一個(gè)線性的比例電位器作位置檢測,該電位器把轉(zhuǎn)角坐標(biāo)轉(zhuǎn)換為一比例電壓反饋給控制線路板,控制線路板將其與輸入的控制脈沖信號比較,產(chǎn)生糾正脈沖,并驅(qū)動(dòng)電機(jī)正向或反向地轉(zhuǎn)動(dòng),使齒輪組的輸出位置與期望值相符,令糾正脈沖趨于為0,從而達(dá)到使伺服電機(jī)精確定位的目的。
伺服電機(jī)從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn))需要200~400毫秒。伺服電機(jī)從靜止加速到其額定轉(zhuǎn)速3000RPM僅需幾毫秒,可用于要求快速啟停的控制場合。
當(dāng)伺服電機(jī)驅(qū)動(dòng)器接收到一個(gè)脈沖信號,它就驅(qū)動(dòng)伺服電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的。
伺服電機(jī)節(jié)能化和環(huán)保化也是小電機(jī)技術(shù)發(fā)展動(dòng)向之一,因此開發(fā)高效率電機(jī)已變成十分迫切的課題。近幾年,伺服電機(jī)的輸出密度已超過1.2kW/kg,效率已達(dá)到90%-97%。通過小電機(jī)高速化、運(yùn)用高性能磁性材料、采用高效率冷卻手段來達(dá)到提高電機(jī)的輸出密度和效率。日本、美國已有不少公司生產(chǎn)高效率電機(jī)并應(yīng)用到汽車領(lǐng)域。
伺服電機(jī)最高轉(zhuǎn)速是多少?
因伺服電機(jī)響應(yīng)速度快,轉(zhuǎn)速從0 RPM加速到2500 RPM僅需3 mS,而普通異步電機(jī)及定量泵轉(zhuǎn)速從0 RPM加速到1480RPM最少在0.2秒以上 也可以通俗的說:如果原來周期為50秒,改造后可降到48秒以下。相當(dāng)于提高生產(chǎn)效率5%以上,相當(dāng)于間接節(jié)電5%。綜合分析,采用伺服節(jié)能系統(tǒng)后,油泵電機(jī)能耗可降低55%以上,通常12個(gè)月左右可回收投資成本。節(jié)能有保障、電機(jī)節(jié)電率50%以上.
-
轉(zhuǎn)速
+關(guān)注
關(guān)注
3文章
122瀏覽量
22049 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2057瀏覽量
58190
發(fā)布評論請先 登錄
相關(guān)推薦
#硬聲創(chuàng)作季 #電機(jī)控制 #PLC 伺服電機(jī)轉(zhuǎn)速范圍控制在多少才算合適?
伺服電機(jī)轉(zhuǎn)速上不去
基于單片機(jī)的交流伺服電機(jī)轉(zhuǎn)速控制系統(tǒng)研究
伺服電機(jī)控制轉(zhuǎn)速與干擾防御措施
總結(jié):伺服電機(jī)控制轉(zhuǎn)速與干擾防御措施






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論