 如何為機器人制作氣動系統
如何為機器人制作氣動系統
步驟1:為什么選擇氣動?
氣動使用壓縮空氣完成任務的系統。任何使用連接到壓縮機的工具(例如牙醫鉆頭或城市公交車(門))的人都經歷過氣動系統。好吧,那太好了,但是為什么我要使用它呢?
實際上非常容易設置,并且它們有助于快速更改。當比賽當天發生故障時,更換或添加新零件確實很容易,它們也非常強大,最大允許60psi的氣壓(無論如何對于FIRST比賽)足以完成大多數任務。氣動裝置相對較輕(我們的整個系統約為10磅),它們不需要太多的電池電量。氣動也更易于設計,您無需將鏈條和皮帶與特殊的殼體或其他任何東西對齊。缺點:它們確實占用了空間,并且需要更多的編程才能使壓縮機和螺線管達到功能,它們還需要大量的零件投資,因為該系統需要所有零件才能正常工作(一個夯錘不是像電動機那樣的獨立零件)。
想象一下將電動機或任何其他電子元件接線,但是,您只需擁有一組可在任何地方使用的管子,而不是正負管,就無需使用規格(電線尺寸)或要剝線的電線,也不需要任何工具即可將它們放在一起(無需進行任何焊接和焊接)熱收縮)。我認為我們所有人都很難將正確尺寸的螺絲刀安裝到正確的插槽中,并“恰好”將其擰緊,以使電線保持在原位。所有這些都可以(在大多數情況下)拋棄,氣動簡單而清潔(與液壓不同)。
如果您自己執行此操作,則無需進行任何編程(會有所幫助),因為它們都是閥門
第2步:您需要什么
所以您需要什么? (我根據2014年FIRST氣動手冊中的內容對此進行了改編)。
壓縮機:這是一種將所有空氣壓縮在一起的裝置,它是所有氣動裝置的基礎。它在操作過程中會變得很熱,因此請確保它附近有一個風扇,并且不要靠近電纜或氣動電纜,因為它會熔化絕緣層并在氣動電纜中插入孔。它還會引起大量振動,因此在將其安裝到機器人上時要考慮到這一點,因此請勿將其放在負責自動操作的攝像機旁邊。同樣,在接線時,它會通過 20安培保險絲或斷路器流過電流(FIRST僅表示斷路器,但我們的保險絲管理得很好,安全檢查員也不介意)。我們從氣動套件中獲得的壓縮機是 Viair 090C ,如果您選擇不使用該壓縮機,那么大多數經驗豐富的團隊將使用另一種壓縮機,因為這支壓縮機開始死亡時,當變熱時,運行時間大約為五分鐘,而冷卻時間約為半小時。 請勿向后接線壓縮機,因為壓縮機會損壞,就像是led而不是電動機。您可以訂購一個此處
您還需要一個尖峰繼電器來控制壓縮機。
泄壓閥:這是必須完全通過黃銅與空氣壓縮機連接的部件(如果執行此操作,則應遵循FIRST規則您自己并沒有關系),這是一種機械安全措施,當壓力過高時,該措施會泄漏空氣。可以通過移動螺紋環來調整它。(我將在后面介紹)。我們得到的是一個Norgren,它運作完美,您可以在此處訂購自己的。
安裝泄壓閥所需的其他連接器:將1/8英寸npt外螺紋(國家管道螺紋)連接到1/4英寸內螺紋連接器,請在此處訂購1。在這里。可以在此處訂購1男2女1/8npt。您也可以使用三重1/8npt母型連接器 * 和公對公1/8in npt的公制連接器 * (AndyMark不出售這些部件,但我建議使用因為它們比2母1母連接器具有更廣泛的用途,所以*這些鏈接未經測試用于演示,我們在本地找到了我們的產品。
壓力開關:當電子元件作為傳感器時,當壓力超過120psi(據說,我們的壓力從80-110psi跳至任何地方)時,它會向程序發送信號,以關閉壓縮機。可以使用1/8英寸npt黃銅連接器(上面的鏈接*)將其連接到系統的其余部分。您可以在此處訂購一個。
氣罐):用于存放壓縮空氣,以備后用。您可能會希望盡可能多地安裝在機器人上。請注意不要讓白色的戰車螺紋端口,因為它們有爆炸的趨勢。黑色戰車為我們的團隊服務良好。您可以從這里訂購。
調節器:這些將壓力限制在下游的任何組件,多個調節器意味著您可以擁有組件在不同的壓力下運行。進行過水肺潛水的任何人都使用過這些呼吸器,它們阻止了水箱中的空氣(120psi)爆炸到您的嘴中。底部有一個箭頭,顯示了空氣應該流過它們的方向。如果將它們放入,則一旦超過指定壓力,壓力就會從調節器中泄漏出來。我們在調節器的頂部印有說明,并能夠向下按以鎖定旋鈕并阻止壓力改變。可以從這里訂購它們。
壓力表:這些顯示系統內部的壓力,我建議獲取3 -4 ,具體取決于您計劃擁有多少條不同的壓力線。這些直接擰入調節器。您可以在這里訂購它們。
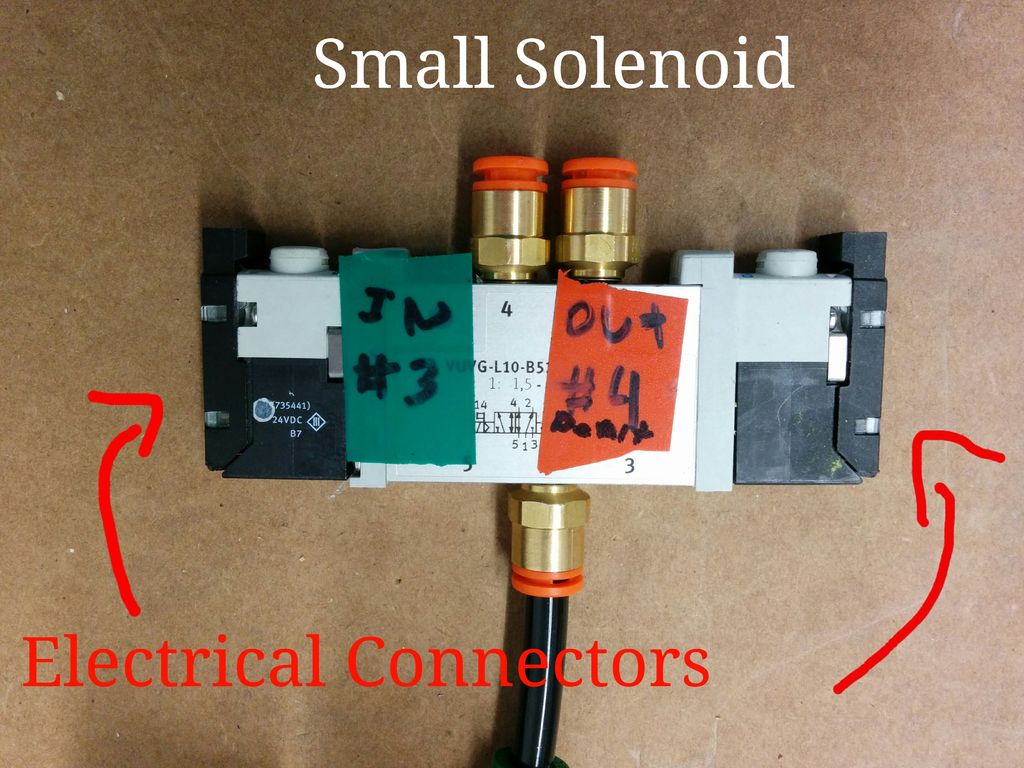
電磁閥:這些就像電氣系統中的斷路器或晶體管。當它們被觸發(從程序中)時,它們將氣流從一個端口切換到另一個端口,有些是雙向作用的,可以雙向控制,有些則沒有,一旦信號消失,它們就會自動切換回去。 這些允許對氣動撞錘進行遠程控制。我們使用的是FESTO閥門,我們有兩種尺寸,孔(孔)越大,空氣流動越快 》通過閥門(首先,您可以擁有的最大孔徑為3/8英寸)。因此,如果您需要速度,請使用更大的閥門。小型電線可以從此處訂購,如果您不想使用MacGyver的方式將電線連接到它們,則每個電磁鐵需要幾對 以及電線。您還需要其中的三個 較小的推動力以連接每個小型電磁閥的配件,或者您可以從此處 訂購它們的包裝。 我相信這是一個較大的螺線管,但是我們沒有訂購,而是在本地購買的。
插入閥(球閥):這些是手動方式要控制空氣流量,您將至少需要 一個,以便通過安全檢查。 獲得很多(4-5),因為您會發現自己想要一種快速的方法來阻塞氣動裝置的某些端口,而不必將一堆黃銅配件和插頭組裝在一起。可以從此處 訂購。我們的團隊使用了一些黃銅管,我認為它們已包含在套件中,但看來AndyMark不再出售它們。
推入連接配件:這些是將所有組件連接在一起的零件。 獲取大量這些內容(50-60),它們都應該 1/8英寸npt和1/4英寸推進行連接。它們具有各種形狀和尺寸,有直管,肘管,流量控制管(它們有點像調節器,但它們會改變速度而不是壓力), y連接器的連接, T型連接的連接 ,或打包交易。其中一些已被保護,但其他(以及您使用了兩次以上的磁帶)將需要 Teflon膠帶(請注意,如果您購買其他商品,則密度較低),有一個正確的方法來貼上特氟龍膠帶(我沒有制作視頻)。
管道:這是空氣將流過的管道,以到達各個氣動部件。這也是使您的機器人在比賽中脫穎而出的機會,高級團隊可以使用各種瘋狂的彩色半透明或在黑暗的管道中發光。除了所有的笑話,顏色的確有助于區分高壓線和低壓線,或者哪個管連接到哪個氣缸,因此最好使一種顏色(最好是黑色)(最好是黑色)和一堆其他顏色的較小角色。所有管子應外徑的1/4 。我們的工具包是所有團隊都能獲得的零件套件,但是您可以在此處
氣壓缸(柱塞)訂購:這是所有其他零件的用途,它們使用存儲的氣壓擴展(或收縮)以完成任務。有所有形狀和尺寸,孔(即圓柱體的寬度)決定了圓柱體可以施加的力(越大,壓力可以作用的平方英寸越大,因此施加的力就越大)請注意,大口徑氣缸(2“)并不是一個好主意,因為它們會慢慢填充,并且會消耗掉您存儲的大量空氣。我們的團隊使用的氣缸分別為1和1/4英寸。行程/行程(氣缸的運動時間)將確定氣缸的時間,我再次建議將其保持較小,因為較大的氣缸不能很好地適應機器人和所有FIRST團隊每年都會獲得兩個免費的 Bimba氣瓶,在零件套件中有一張應使用的優惠券,即使您當年不使用它們也是如此。可以儲存零件以備后用。您也可以從此處訂購零件,但請務必檢查零件是否有(最大的1/8“螺紋。
如果您在機器人技術方面一直走得很遠,很可能已經有了這些其他工具,但以防萬一:
小月牙扳手
內六角扳手(英制和公制)
剪線鉗
副手柄
這是很多東西,但是請相信我,這是值得的,它將打開各種您團隊的設計思路。而且一切都可以在明年重復使用,因此您實際上只需要購買一次。
步驟3:氣動的工作方式
氣動通過控制壓縮空氣的流量來工作。電子設備控制電子流動的方式幾乎相同。氣動使用閥門來控制空氣流動,這些閥門可以由其他壓縮空氣源觸發(但是在FIRST比賽中禁止使用此類閥),也可以由電力或手動觸發(這些不是很有用)但適用于機器人)。由電控制的閥稱為螺線管,因為它們利用電流感應磁場,該磁場使金屬碎片運動并迫使空氣以特定方式運動。
最簡單的氣動系統只有一個手動控制閥。任何使用過空氣釘子的人都使用過這樣的系統。空氣壓縮機壓縮并存儲空氣,然后當用戶拉動扳機時,釋放空氣并將釘子釘入木材(或任何釘子)。
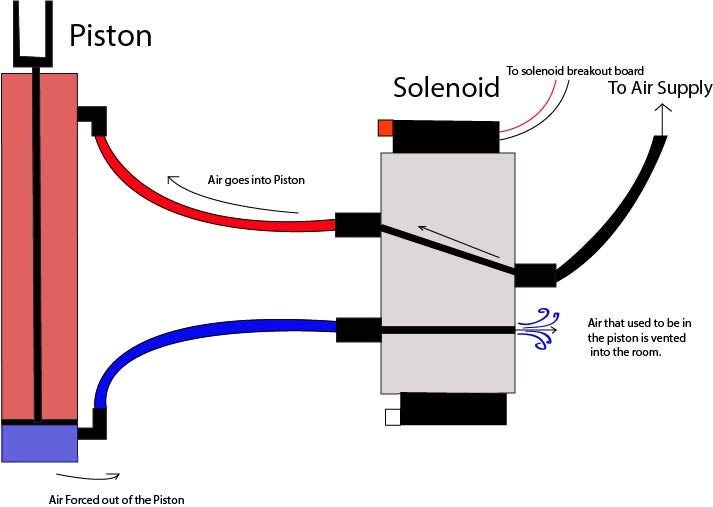
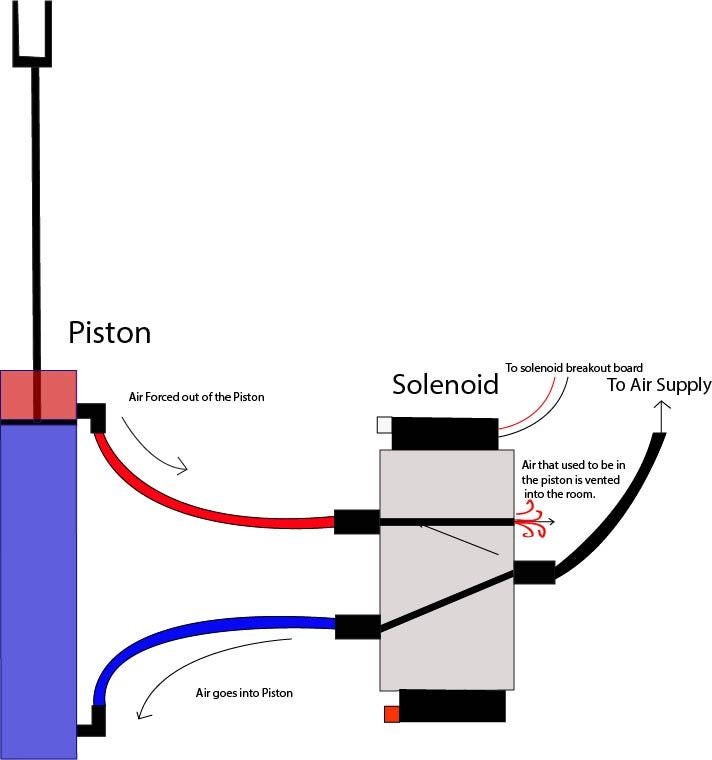
我們在FIRST機器人中使用的閥屬于電磁閥。第一張圖片顯示了雙作用螺線管如何通過向氣缸的頂部填充空氣來將活塞推入向下位置。第二張圖片顯示了當程序觸發電磁閥時,活塞如何伸出。
就是這樣,氣動實際上非常簡單。就像一切一樣,盡管氣動系統會變得非常復雜,但是對于機器人而言,簡單的系統運行良好,沒有理由使其變得非常復雜。
第4步:基本設置
FIRST比賽所需的基本氣動系統如下
壓縮機---》泄壓閥---》儲氣罐---》壓力表---》壓力開關---》球閥
-將壓縮機連接到尖峰繼電器上,使用20安培保險絲。再次使用20安培斷路器將尖峰繼電器連接到配電板上。將pwm電纜連接到Spike,然后詢問您的編程人員cRIO(I/O板上)的哪個端口將另一端插入。 (圖1)
-將1/8“ npt外螺紋與1/8” npt外螺紋連接器擰入壓縮機,確保在所有螺紋連接處都貼上特氟龍膠帶。 (圖2-6)
-將1/8“ npt黃銅T型連接器之一擰入1/8” npt連接器的裸露端。 (圖7)
-將1/8“ npt到1/4” npt擴大器擰到泄壓閥的基座上。 (圖9)
-將泄壓閥組件擰入黃銅T型連接器的“頂部”。 (圖10)
-可選-調整泄壓閥的方向,使其靠近壓縮機,以節省空間。 (圖11)
-將直的1/8“ npt擰到1/4”的螺紋,以將接頭連接到黃銅T型連接器的最后一個孔中,然后將一根管子推入,然后將其推入管道的裸露端到空氣儲存罐中。 (圖12-13)
-將一根管子推入儲氣罐的遠端,并通過1/8“推將其連接以將配件連接到帶螺紋的1/8” npt T -連接器。
-將量規插入該黃銅T型連接器的頂部(圖14-15)
-組裝另一個帶螺紋的1/8“ npt T型連接器它可以推動將兩個“底部”端口上的配件連接起來,并將壓力開關擰入“頂部”端口中。(圖16)
-將剛剛創建的組件連接到T- (pic 17)
-組裝球閥,使其具有推動力以連接兩端的配件,并連接到帶有(圖18)
-將兩根電線連接到壓力開關的端子上并用膠帶包裹,然后將這兩根電線拼接成pwm電纜,僅使用連接到兩個外部引腳的pwm電纜,其余的中間電纜沒有連接到任何并應使用電工膠帶包裹。 (圖20)
-詢問您的程序員將pwm拼接電纜插入哪個端口,具體取決于每個團隊的程序。(圖21)
系統的所有部分在一起,我們只需要校準系統即可。
-打開機器人,壓縮機應該開始運行。
-觀察壓力表,當針達到120psi時轉動機器人
-調整泄壓閥上的螺栓,直到空氣開始從頂部的小孔漏出。
現在完成基本設置,下一步是完成
步驟5:添加高壓線
要向系統中添加一條高壓管,它實際上可以起作用,請從以下開始:
-切斷氣罐和壓力開關之間的管
-輸入將T型連接器插入到您剛剛通過切割管子而形成的空間中-將一根管子推入T型連接器的裸露孔中/*從此處開始,使管子的長度盡可能短節省空氣并使系統更快。 */
-將調節器推到從T型連接器延伸的那段管子上(將螺紋擰入以連接接頭),確保箭頭指向遠離管子的方向,而不是指向管子。
-將另一根管子(可能根據您的配色方案而定,使用不同的顏色)推入與該管子相對的端口中,箭頭應指向該管子,從此處開始系統中的氣壓將被設置通過調節器。
-將壓力計旋入調節器上其他兩個裸露的端口中的任意一個(確保已用特氟隆膠帶固定)。
-在裝有調節器的包裝中,應該有兩個小螺紋件,他們可能在頂部有一個艾倫(Allen)鑰匙形孔。用膠帶將其中之一包起來,然后將其穿入調節器的其余端口。
-通過擰緊m7螺紋推動器以將配件連接到端口中,從而設置電磁閥。
-將從調節器伸出的管子推入螺線管的“底部”,底部只有一按才能連接,頂部有兩個管子。
-將不同顏色的管子插入到電磁鐵的其余端口中電磁閥,一個將使氣缸伸出,一個將使其收縮。在打開壓縮機電源之前,我們不知道是哪一個。
-將這些管子放在推桿/執行器/氣缸的頂部和底部。氣缸需要推壓才能將配件擰入氣缸頂部和底部的孔中,我建議使用彎頭,因為它們具有自由旋轉的能力。
-打開壓縮機。請注意氣瓶可能會伸出,所以請不要靠近它,它不會快速射出,但請多加注意。
-如果柱塞伸出,則底部的氣管正在吸氣,如果它不是頂部的管道正在接收空氣。用一條膠帶標記正在通氣的試管。
-旋轉調節器頂部的旋鈕,并觀察連接到調節器上的壓力表以設置壓力。當您有所需的壓力時(在第一次比賽中,壓力不超過60),然后向下按調節器的旋鈕,這將阻止其旋轉并改變壓力。
-根據您的目的布置油管,您是否想要在打開機器人電源時使氣缸伸出以收縮嗎?
-將電線連接到螺線管的“左”和“右”端,可能需要將這些電線拼接成pwm電線以適合進入螺線管分線板,與程序員協商確定應將其插入哪個端口。
-現在,您的機器人具有升高和降低液壓缸的能力,這取決于您。/*該程序需要正確設置,但是我對它的了解不足以指導您,因此應該很快就會有關于對FIRST機器人進行編程的說明,因此請檢查一下。 */
步驟6:添加低壓線
添加低壓力管線與高壓管線完全相同,不同之處在于調節器設置為不同的壓力。
在高壓管線的T型連接器和壓力開關之間的管路中切出一個空間, a T型連接器:
-按照相同的步驟(步驟4)對調節器和電磁閥進行配管。
-調節調節器,使其壓力比前面的壓力低。
-繼續進行此操作您可以按照降壓順序處理任意數量的壓力線。/*順序不會影響系統,但是按照這種順序是常規的。一旦纏結在機器人的腹部,您可能希望對不同的行進行顏色編碼,以便輕松更改*/
第7步:常見問題
這是我的常見問題頁面,其中包含常見問題和上述問題的解決方案。如果您想添加一些內容,請發表評論。
泄漏了我該怎么辦?
所有的球閥都完全關閉,這對我們的團隊來說是很多問題了。
然后,如果您在嘈雜的地方(例如比賽),請聽一下空氣泄漏的地方。 ),您還有兩個選擇,一個裝滿肥皂水的噴霧瓶或一個大口徑的試管。如果使用肥皂水,請將其噴灑在任何可能泄漏的接頭附近,并注意是否有氣泡。如果您正在使用電子管,則將一端放在耳朵附近(或里面),另一端到處移動,直到聽到泄漏聲為止。肥皂水是更好的選擇,因為即使少量的壓縮空氣也會嚴重損壞您的耳膜。
大多數情況下,泄漏是由未完全嚙合或松動的連接配件推動引起的。確保完全壓住連接配件的推力,然后稍稍拉出以將內部的齒插入塑料中。
也可能是管道切成90度時,未直截的管子可能會泄漏。
如果仍然泄漏,請在螺紋連接處添加特氟龍膠帶。
如果仍然泄漏,請尋找損壞的電纜。它們可能被壓縮機熔化,被風扇割斷,被機器擠壓等。..
壓力上升到一定壓力然后泄漏了嗎?
這是兩件事之一:
1.)向后安裝調壓器,切換調壓器的方向,以設置系統開始泄漏之前達到的壓力。
2.)調節器后某處的連接器泄漏。在將調節器設置為系統泄漏的壓力后,檢查所有連接器。
點火時空氣是否從電磁閥中泄漏?
這是正常現象,輸入管兩側的孔是排氣口,用于排出先前存儲在活塞中的空氣。
還有其他問題,請查看Chief Delphi論壇并在此處發布問題。
FIRST競賽也承諾了一些加快活塞速度的方法,通常會將一些東西扔進某種類型的球門中,因此速度通常比活塞施加的力更重要。
》
(無特殊順序:
1。)獲取更大的電磁閥。
2。)獲得小口徑氣缸,這將減少流入活塞以使其完全伸展所需的空氣量。
2。 p》
3。)如果您的活塞需要快速向前移動,則拆下從氣缸前部端口到電磁閥的管路。這意味著空氣只需要流過電磁閥一次,但這也意味著您不能縮回氣缸。
4。)縮短從電磁閥到活塞的管路長度,這可以與使用小口徑氣缸的原理相同,移動的空氣更少。
5。)在螺線管之前但在調節器之后添加一個調壓罐(空氣存儲罐)。這樣可以提供60 psi的大量空氣。并且意味著空氣不必流經螺線管。不利的一面是,當您縮回鋼瓶時,您將用完油箱中的所有空氣。
6。)確保在FIRST比賽中將調節器設置為最大壓力60psi。
-
氣動
+關注
關注
0文章
26瀏覽量
16843
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
機器人是如何工作的 機器人工作原理解析





 工商網監
工商網監
評論