") 微雪電子紅外循跡傳感器 紅外循跡巡線模塊介紹
微雪電子紅外循跡傳感器 紅外循跡巡線模塊介紹
ITR20001/T 紅外循跡傳感器模塊 智能小車機(jī)器人配件


PID控制算法 高靈敏度 抗干擾 性能穩(wěn)定
紅外循跡傳感器
產(chǎn)品簡(jiǎn)介
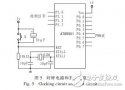
下面以接入MCU為例:
【一句話自我介紹】
我是紅外循跡傳感器,如果你要做循跡智能小車或機(jī)器人巡線,那么我是不錯(cuò)的選擇。
- 采用五路ITR20001/T紅外光探測(cè)器,高靈敏度、抗干擾、性能穩(wěn)定
- 模擬輸出精度更高,結(jié)合PID控制算法,使小車循跡更穩(wěn)定
- 工作電壓:3.3V ~ 5V
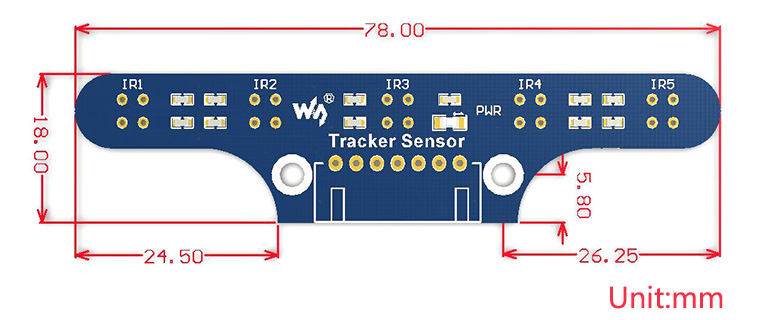
- 產(chǎn)品尺寸:78mm × 18mm
- 探頭間距:16mm
- 固定孔尺寸:3mm
- 感應(yīng)距離:1cm ~ 5cm
- 循跡智能小車或機(jī)器人巡線等
下面以接入MCU為例:
- VCC:接3.3V ~ 5V
- GND:接GND
- IR1:接MCU.IO (通道1,模擬量輸出)
- IR2:接MCU.IO (通道2,模擬量輸出)
- IR3:接MCU.IO (通道3,模擬量輸出)
- IR4:接MCU.IO (通道4,模擬量輸出)
- IR5:接MCU.IO (通道5,模擬量輸出)
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6086瀏覽量
35613 -
微雪電子
+關(guān)注
關(guān)注
9文章
873瀏覽量
6794
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
紅外循跡小車的設(shè)計(jì)資料分享
/******************************************************************紅外循跡小車V1.0作者:Railgun Boom~時(shí)間:2020.11.19交流群:1033131250
發(fā)表于 01-05 07:50
紅外循跡傳感器PID循跡算法的相關(guān)資料分享
紅外循跡傳感器PID循跡算法前一段時(shí)間參加了一個(gè)小車循跡競(jìng)速的比賽,獲得了一個(gè)還行的成績(jī),所以在這里想把里面的核心部分PID尋
發(fā)表于 01-14 08:03
PID紅外循跡的相關(guān)資料分享
高電平,模塊燈熄滅,且ADC最大,數(shù)字量輸出為1,即若檢測(cè)到為001則就是小車偏左了,最右邊那個(gè)傳感器移動(dòng)到黑色地
發(fā)表于 01-14 06:18
紅外PID循跡模塊的原理是什么
寫(xiě)在前面?關(guān)于紅外PID循跡模塊的原理我之前寫(xiě)過(guò)一篇博客,大家沒(méi)看過(guò)的話可以點(diǎn)此鏈接查看:PID循跡模塊原理。此
發(fā)表于 01-14 07:35
如何去實(shí)現(xiàn)一種基于三路循跡模塊的智能小車設(shè)計(jì)呢
紅外傳感器巡線的基本原理是什么?如何去實(shí)現(xiàn)一種基于三路循跡模塊的智能小車設(shè)計(jì)呢?
發(fā)表于 01-20 06:26
基于紅外傳感器ST188的自動(dòng)循跡小車設(shè)計(jì)
設(shè)計(jì)了一種以紅外傳感器ST188、AT89S51為控制核心的自動(dòng)循跡小車,系統(tǒng)采用單片機(jī)AT89S51產(chǎn)生PWM波調(diào)控小車速度,紅外傳感器ST188對(duì)路面黑色軌跡進(jìn)行檢測(cè),并將檢測(cè)到的信號(hào)反饋給
發(fā)表于 03-04 16:20
?940次下載
基于紅外光電傳感器和語(yǔ)音識(shí)別技術(shù)的智能循跡小車設(shè)計(jì)_張兢
基于紅外技術(shù)的智能小車系統(tǒng)基于紅外光電傳感器和語(yǔ)音識(shí)別技術(shù)的智能循跡小車設(shè)
發(fā)表于 05-09 16:11
?5次下載
微雪電子紅外接近傳感器 紅外避障模塊簡(jiǎn)介
紅外接近傳感器
能發(fā)射紅外線 也能接收反射回來(lái)的紅外線 靈敏度可調(diào) 可用于機(jī)器人循跡、避障小車和流水線計(jì)數(shù)等
型號(hào) Infrared P

使用以雙灰度傳感器實(shí)現(xiàn)的曲線循跡以及矩形循跡的資料說(shuō)明
豐富包括電動(dòng)機(jī)的焊接、紅外遙控模塊調(diào)試、以L298N實(shí)現(xiàn)的電機(jī)調(diào)速及正反轉(zhuǎn)、灰度傳感器的調(diào)試、循跡方案及arduino代碼設(shè)計(jì)。在圓滿完成循跡
發(fā)表于 12-23 08:00
?12次下載
紅外循跡傳感器PID循跡算法
紅外循跡傳感器PID循跡算法前一段時(shí)間參加了一個(gè)小車循跡競(jìng)速的比賽,獲得了一個(gè)還行的成績(jī),所以在這里想把里面的核心部分PID尋
發(fā)表于 01-14 11:04
?36次下載

串口直輸型PID紅外循跡模塊/PID循跡
寫(xiě)在前面?關(guān)于紅外PID循跡模塊的原理我之前寫(xiě)過(guò)一篇博客,大家沒(méi)看過(guò)的話可以點(diǎn)此鏈接查看:PID循跡模塊原理。此
發(fā)表于 01-14 11:07
?10次下載
紅外循跡傳感器模塊設(shè)計(jì)原理圖及PCB文件
紅外循跡傳感器模塊設(shè)計(jì)原理圖PCB及說(shuō)明書(shū)文件
發(fā)表于 05-25 15:45
?13次下載
CW32模塊使用 紅外循跡傳感器
紅外循跡傳感器采用TCRT5000紅外反射傳感器,一種集發(fā)射與接收于一體的光電傳感器,它由一個(gè)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論