") 霍爾無(wú)刷電機(jī)中位置檢測(cè)中斷實(shí)現(xiàn)
霍爾無(wú)刷電機(jī)中位置檢測(cè)中斷實(shí)現(xiàn)
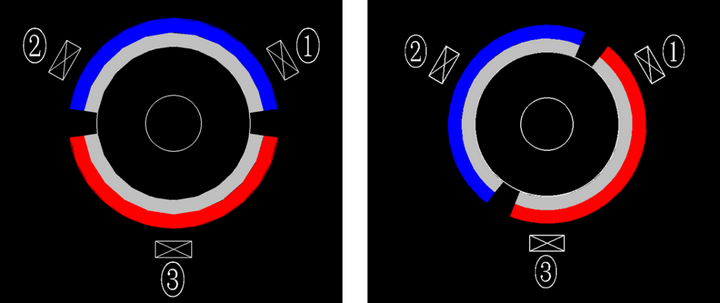
有感霍爾無(wú)刷電機(jī)轉(zhuǎn)子的位置檢測(cè)主要通過(guò)霍爾傳感器來(lái)實(shí)現(xiàn),通過(guò)處理器的異或功能可以講霍爾傳感器發(fā)出的三路180°的信號(hào)處理為一路60°的信號(hào)。通過(guò)檢測(cè)該信號(hào)就可以對(duì)傳感器的電角度位置進(jìn)行計(jì)算,轉(zhuǎn)子每轉(zhuǎn)過(guò)60°的點(diǎn)角度,就會(huì)在處理器中對(duì)轉(zhuǎn)子位置進(jìn)行更新。

其具體的程序如圖,當(dāng)處霍爾無(wú)刷電機(jī)理器檢測(cè)到轉(zhuǎn)子位置角的跳變信號(hào)時(shí),會(huì)首先判斷中斷是否為捕獲中斷,如果該中斷不是捕獲中斷而是更新中斷,在判斷出更新中斷中的判斷超時(shí)后,處理器會(huì)確定轉(zhuǎn)子位置角沒(méi)有發(fā)生改變,轉(zhuǎn)子電角度的值保持不變。

如果檢測(cè)到終端為捕獲中斷,則處理器會(huì)對(duì)轉(zhuǎn)子位置電角度進(jìn)行更新,同時(shí)改變捕獲極性。在進(jìn)行轉(zhuǎn)子位置檢測(cè)的過(guò)程中,需不斷的對(duì)定時(shí)器分頻值進(jìn)行調(diào)整,以保證計(jì)數(shù)器的時(shí)鐘是一個(gè)合適的值,確保轉(zhuǎn)子位置角檢測(cè)的精度。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
無(wú)刷電機(jī)
+關(guān)注
關(guān)注
58文章
847瀏覽量
46045
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
霍爾元件在空調(diào)電機(jī)中的應(yīng)用
霍爾元件在空調(diào)電機(jī)中的應(yīng)用主要體現(xiàn)在以下幾個(gè)方面: 一、檢測(cè)與控制電機(jī)轉(zhuǎn)速 霍爾元件作為磁傳感器
霍爾開(kāi)關(guān)在各種電機(jī)上的應(yīng)用
是無(wú)刷直流電機(jī)中必不可少的部件,用于檢測(cè)轉(zhuǎn)子的位置,以實(shí)現(xiàn)換相控制。 工作原理:霍爾開(kāi)關(guān)通過(guò)感應(yīng)

霍爾傳感器在三相直流無(wú)刷電機(jī)中的安裝使用
在三相直流無(wú)刷電機(jī)中,通常會(huì)使用三個(gè)霍爾傳感器來(lái)檢測(cè)轉(zhuǎn)子的位置,這三個(gè)霍爾傳感器的安裝通常有兩種
淺談無(wú)刷電機(jī)的工作流程
上一期的芝識(shí)課堂,我們跟大家一起分析了無(wú)刷電機(jī)的四個(gè)功能單元,并詳細(xì)分析了PWM和逆變器單元的工作情況,今天我們繼續(xù)來(lái)熟悉無(wú)刷電機(jī)工作流程中另外兩個(gè)重要的部分——轉(zhuǎn)子位置

無(wú)刷電機(jī)和空心杯電機(jī)哪個(gè)好?
和換向器的電機(jī)。它通過(guò)電子換向器(通常是霍爾傳感器)來(lái)控制電機(jī)的磁場(chǎng),從而實(shí)現(xiàn)無(wú)接觸的換向。無(wú)刷電機(jī)的轉(zhuǎn)子通常由永磁材料制成,而定子則包含繞
無(wú)刷電機(jī)驅(qū)動(dòng)方案的應(yīng)用
:
有刷電機(jī):電流換向是通過(guò)碳刷在換向器上的物理移動(dòng)來(lái)實(shí)現(xiàn)的。
無(wú)刷電機(jī):電流換向是通過(guò)電子電路根據(jù)轉(zhuǎn)子的位置來(lái)改變電流的方向。
效率:
有刷電
發(fā)表于 10-21 16:00
開(kāi)關(guān)磁阻電機(jī)中的霍爾傳感器的作用
開(kāi)關(guān)磁阻電機(jī)(Switched Reluctance Motor,簡(jiǎn)稱SRM)是一種無(wú)刷電機(jī),它通過(guò)改變定子繞組的電流來(lái)控制轉(zhuǎn)子的位置和速度。在開(kāi)關(guān)磁阻電機(jī)的控制系統(tǒng)
使用霍爾效應(yīng)傳感器針對(duì)篡改和移動(dòng)終點(diǎn)位置檢測(cè)實(shí)現(xiàn)限制檢測(cè)
電子發(fā)燒友網(wǎng)站提供《使用霍爾效應(yīng)傳感器針對(duì)篡改和移動(dòng)終點(diǎn)位置檢測(cè)實(shí)現(xiàn)限制檢測(cè).pdf》資料免費(fèi)下載
發(fā)表于 09-10 10:06
?0次下載

無(wú)刷電機(jī)正反轉(zhuǎn)怎么調(diào)
無(wú)刷電機(jī)的正反轉(zhuǎn)調(diào)整方法主要涉及到電機(jī)相線和霍爾信號(hào)線的連接調(diào)整。以下是一些具體的步驟和方法: 一、通過(guò)調(diào)換連接項(xiàng)線實(shí)現(xiàn)正反轉(zhuǎn) 拆下電機(jī)項(xiàng)線
直流無(wú)刷電機(jī)的控制方式有哪些
直流無(wú)刷電機(jī)是一種采用電子換向器代替?zhèn)鹘y(tǒng)機(jī)械換向器的電動(dòng)機(jī)。與傳統(tǒng)的有刷直流電機(jī)相比,直流無(wú)刷電機(jī)具有更高的效率、更低的噪音、更長(zhǎng)的壽命以及更寬廣的調(diào)速范圍等優(yōu)點(diǎn)。直流無(wú)刷電機(jī)通常由永
關(guān)于霍爾無(wú)刷電機(jī)速度失控的問(wèn)題求解
霍爾無(wú)刷電機(jī)最大的轉(zhuǎn)速是1000轉(zhuǎn),24V,通過(guò)ST的MotorControl Workbench上位機(jī)設(shè)置電機(jī)啟動(dòng)速度800轉(zhuǎn) 電機(jī)轉(zhuǎn)速正常,(每次啟動(dòng)都是800轉(zhuǎn)的速度)然后按st
發(fā)表于 04-28 07:34
stm32的foc是怎么檢測(cè)到無(wú)感無(wú)刷電機(jī)的轉(zhuǎn)子的位置的?
大家好,一般驅(qū)動(dòng)無(wú)感無(wú)刷電機(jī),都是靠BEMF反電勢(shì)來(lái)檢測(cè)轉(zhuǎn)子的位置的,典型電路就是幾個(gè)電阻分壓加幾個(gè)電容濾波。
但我在stm32的電機(jī)驅(qū)動(dòng)開(kāi)發(fā)板上,沒(méi)有發(fā)現(xiàn)這個(gè)電路。
請(qǐng)教,stm
發(fā)表于 04-28 06:03
無(wú)霍爾三相無(wú)刷電機(jī)在運(yùn)行過(guò)程中異常停止,且停止后電流增大的原因?
無(wú)霍爾三相無(wú)刷電機(jī)在運(yùn)行過(guò)程中異常停止,且停止后電流增大。各位大神,該怎么檢測(cè)引起這種情況的原因?
發(fā)表于 04-22 06:02
如何通過(guò)電機(jī)的霍爾傳感器讀取位置實(shí)現(xiàn)位置環(huán)控制?
如何通過(guò)電機(jī)的霍爾傳感器讀取位置實(shí)現(xiàn)位置環(huán)控制
發(fā)表于 03-19 08:04
如何通過(guò)電機(jī)的霍爾傳感器讀取位置實(shí)現(xiàn)位置環(huán)控制?
如何通過(guò)電機(jī)的霍爾傳感器讀取位置實(shí)現(xiàn)位置環(huán)控制
發(fā)表于 03-06 07:18





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論