 如何略微了解量子定位
如何略微了解量子定位
基于量子定位導航系統原理,設計并分析了基于3顆衛星的星基量子定位導航系統的測距與定位過程,包括星地光鏈路的建立、量子糾纏光的發射與接收、到達時間差的獲取、量子定位導航系統的測距,以及用戶坐標的計算與導航,并對量子定位導航系統中的每個過程的實現進行了詳細的闡述。
全球定位系統(Global Positioning System,GPS)是通過測量用戶接收機接收到衛星星歷信號的傳播時間,計算出衛星與用戶之間的距離。由于衛星與用戶之間的時鐘無法完全同步,存在鐘差,用戶利用該方法需獲取到4顆衛星與自身的距離,再根據距離與坐標的關系,聯立方程組,解算出用戶的空間坐標,實現對用戶的定位[1]。量子定位導航系統(Quantum Positioning System,QPS)是在GPS的基礎上,利用具有量子糾纏特性的糾纏光取代了電磁波,通過測量相互關聯的兩束糾纏光的到達時間差(Time Difference Of Arrival,TDOA),再根據獲取的TDOA解算出衛星與用戶的距離以及用戶的空間坐標[2]。另外,糾纏光的糾纏度、帶寬、光譜、功率以及脈沖中光子數都會影響QPS的精度,光子數越多,QPS的定位精度越高[3]。
根據糾纏光子對發生器在衛星端還是地面端的不同,可以將QPS分為星基(satellite-based)QPS和地基(earth-based)QPS。作者所在研究小組提出了基于3顆衛星的QPS[4],利用3顆量子衛星實現對用戶的定位。當其工作于星基模式時,衛星上的糾纏光子對發生器發射兩束糾纏光,其中一束沿星地光鏈路到達用戶,并從用戶處反射回衛星,被衛星上的一個單光子探測器接收;另一束直接發射向衛星上的另一個單光子探測器,完成糾纏光子對的發射與接收。此時衛星內部直接發射向單光子探測器的糾纏光一直在衛星內部,利用兩路糾纏光的TDOA計算出兩路糾纏光的光程差就是衛星與地面的距離的2倍。根據3顆衛星得到的3個TDOA,分別計算出3顆衛星到用戶的距離,通過聯立解算獲得的3個距離方程,計算用戶的空間坐標。
本文基于對3顆衛星的星基QPS的測距與定位完整過程的分析,進行了系統結構的設計。首先在星地之間建立星地光鏈路;之后針對衛星發射的量子糾纏光,分別接收沿著星地光鏈路發射向用戶,再沿原路返回衛星,被單光子探測器接收的信號光,以及直接被單光子探測器接收的閑置光。通過符合計數,再采用最小二乘法進行數據擬合,獲取到信號光和閑置光的TDOA,最后根據3顆衛星發射的糾纏光獲取到的TDOA聯立方程組,解算出衛星到用戶的距離和用戶空間坐標,并通過對用戶的不間斷定位,獲取用戶的運動軌跡,實現對用戶的導航。
本文結構如下:第1節為星地光鏈路的建立;第2節為糾纏光TDOA的獲取;第3節為基于TDOA的量子測距、定位與導航;第4節為結論。
1星地光鏈路的建立
星基QPS的測距與定位過程可以分成2個部分:星地光鏈路的建立,以及利用量子糾纏光動態通信進行的導航定位。星地光鏈路的建立是為量子糾纏光信號在衛星與用戶之間傳播提供精準的光鏈路,包括信標光發射、捕獲、跟蹤和瞄準4個過程,這4個子過程都是通過捕獲、跟蹤及瞄準(Acquisition Tracking and Pointing,ATP)系統實現。基于量子糾纏光的測距、定位與導航是根據建立好的星地光鏈路,采用量子糾纏光動態通信進行測距、定位和導航,其工作過程分為量子糾纏光的發射與接收、糾纏光TDOA的獲取,以及基于TDOA的量子測距、定位與導航3個部分。
星地光鏈路的建立過程如圖1所示,其中,上半部分為衛星端ATP系統,下半部分為地面端ATP系統,圖中綠色實線及區域代表信標光光束,藍色虛線代表電信號。ATP系統由信標光模塊、粗跟蹤模塊、精跟蹤模塊以及超前瞄準模塊四部分構成。其中,粗跟蹤模塊由光學天線、二維轉臺、粗跟蹤探測器以及粗跟蹤控制器組成[5];精跟蹤模塊由快速反射鏡(Fast Steering Mirror,FSM)、精跟蹤探測器和精跟蹤控制器組成[5]。
衛星端與地面端通過各自的信標光發射器相互發射信標光,利用ATP系統對對方發射的信標光實施捕獲、跟蹤和瞄準,建立起雙向瞄準的星地光鏈路[6]。其具體建立的過程為:首先,地面端作為信標光的發射方,衛星端作為捕獲方。地面端根據衛星的軌道信息,計算出衛星經過地面端所在位置上空的軌道及其時間段,隨后轉動粗跟蹤模塊中的二維轉臺,使其視軸指向此時經過地面端上空衛星的不確定區域,隨后令信標光發射器發射一束波長為800~900nm,散角較寬的信標光1a,覆蓋衛星端所在區域;衛星端同樣依據星歷表或GPS計算用戶的大致位置,通過二維轉臺調整光學天線的方位角和俯仰角,將粗跟蹤探測器的視軸指向用戶。隨后衛星端光學天線將對用戶所在的不確定區域進行掃描,并啟動粗跟蹤控制器調整信標光的掃描模式,通過掃描,地面端發射的上行信標光1a進入了衛星端粗跟蹤探測器視場,完成捕獲過程。之后衛星端轉入粗跟蹤階段,實現大范圍跟蹤信標光。粗跟蹤探測器探測上行信標光光軸的變化,主要是通過處理入射信標光光束在探測陣面上的光斑位置表征地面端方向。然后粗跟蹤控制器根據光軸變化量即光斑數據采用控制算法計算控制量,驅動二維轉臺電機,完成對光學天線指向的調整,將上行信標光引入精跟蹤模塊視場中,隨后進入精跟蹤階段。FSM先對經由光學天線輸出并經過準直透鏡處理的上行信標光3a進行反射,通過精跟蹤探測器的鏡頭后進入精跟蹤探測器,并在探測器上形成光斑。精跟蹤探測器將光斑信號轉換成在探測器上分布的電流信號,經由模數轉換形成數字的光斑能量信號。然后對分布的光斑能量信號進行采集,計算獲取精跟蹤角度誤差,并將誤差信號S3a傳遞給精跟蹤控制器。精跟蹤控制器經過一定的控制算法計算輸出控制信號S4a,控制FSM偏轉一定角度,使上行信標光能夠精確對準精跟蹤探測器中心,從而實現精跟蹤過程,達到入射光軸與主光學天線光軸精確對準。系統的粗跟蹤精度ΔθF=±0.5mrad[5],精跟蹤精度ΔθC=±2μrad[7]。當衛星端發射下行信標光后,地面端也先后工作在與上行信標光類似的捕獲、跟蹤和瞄準過程,此時,衛星端與地面端均處在跟蹤狀態。當星地兩端完成雙向跟蹤,就實現了星地光鏈路的建立與維持,可以進行下一步的量子糾纏光的發射與接收。
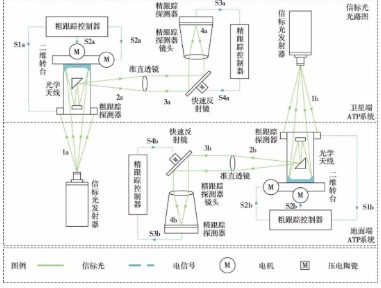
圖1星地光鏈路的建立過程
2糾纏光TDOA的獲取
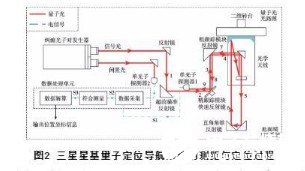
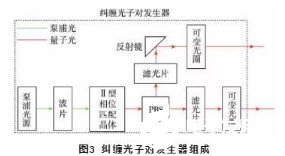
在所建立的已經精確對準的星地光鏈路上,基于量子糾纏光進行測距與定位是整個QPS工作的關鍵。一組三星星基QPS的測距與定位過程如圖2所示,其中,紅色實線代表量子糾纏光光束,藍色虛線代表電信號,其過程主要由糾纏光子對發生器、ATP系統、單光子探測器、數據處理單元四部分完成。其中,糾纏光子對發生器的組成如圖3所示,糾纏光子對發生器由泵浦光源、波片、II型相位匹配晶體、偏振分束器(Polarizing Beam Splitter,PBS)、濾光片、反射鏡及可變光圈組成[8];數據處理單元由數據采集、符合測量和數據解算3個模塊組成。下面通過量子糾纏光子對的發射與接收、糾纏光TDOA的求解,以及基于TDOA的量子測距、定位與導航來具體闡述基于量子糾纏光的測距與定位過程。
1)量子糾纏光子對的發射與接收
圖2中的紅線標注的為量子糾纏光子對的發射與接收過程:衛星端和地面端的ATP系統利用信標光建立星地光鏈路,衛星端開始進行量子糾纏光的發射與接收。發射過程為:糾纏光子對發生器產生相互關聯的信號光與閑置光,其中,信號光入射至超前瞄準反射鏡,超前瞄準模塊通過計算星地端相對運動產生的瞬時角度偏差,驅動超前瞄準反射鏡調整一個角度,從而實現對信號光角度偏差的補償;隨后信號光進入精跟蹤模塊的FSM,利用FSM反射至粗跟蹤模塊的反射鏡中,再反射至光學天線;光學天線將信號光7發射至地面端的角錐反射器中,從而完成量子糾纏光的精確發射。接收過程為:糾纏光子對中的信號光經由地面角錐反射器,原路徑返回衛星端ATP系統,先從光學天線進入粗跟蹤模塊反射鏡反射至精跟蹤模塊的FSM上,入射至單光子探測器1;閑置光在糾纏光子對發生器發出后,經反射鏡反射后直接進入單光子探測器2中被接收。
2)糾纏光TDOA的計算
糾纏光TDOA的計算過程是在圖2中的數據處理單元中完成。糾纏光子對發生器產生的糾纏光子對同時產生一組信號光子和閑置光子,其中,閑置光直接發射向單光子探測器2;而信號光通過星地光鏈路發射向地面,地面再反射回衛星,由單光子探測器1接收。信號光子經過了2次衛星與地面之間的距離,它到達探測器1的時間與閑置光到達探測器2的時間之間存在的時間差,稱為TDOAΔt。通過對所獲的糾纏光子對信號數據的處理來獲得這個TDOA,并將其與光速相乘得到信號光與閑置光傳播的光程差,計算出衛星與地面用戶的距離。
為了獲得這個TDOA,需要首先利用數據采集模塊采集2個單光子探測器輸出的脈沖信號S1,生成兩路具有時間戳標記的時間序列數據S2,閑置光時間序列CH2以及含有與其存在TDOAΔt的信號光時間序列CH1,并對所獲得的時間序列CH2和CH1進行符合測量,通過數據擬合得到所需要的TDOAΔt的值。提出了一種基于軟件完成的符合測量及其數據擬合獲取TDOA的過程,整個過程如圖4所示,包括符合計算、歸一化處理和數據擬合3個部分。
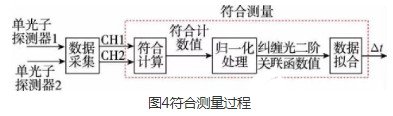
圖4符合測量過程
符合計算軟件實現的思想為:通過對獲得的兩路時間序列中的CH2給定不同的延時,對所獲得的兩路時間序列的CH1與每個給定延時下的CH2分別進行符合計數,得到一系列的符合計數值。當給定CH2的延時與TDOA相等時,CH1與CH2上的所有脈沖點都能完成符合計數,此時符合計數值達到最大。由于糾纏光的二階關聯函數符合計數值與時延之間的關系,所以它的最大值所對應的延時就是糾纏光的TDOAΔt。根據給定的不同的時延所獲得的相應的符合計數值,可以作出一條由給定的不同延時下的符合計數值組成的離散點曲線。因為關心的是獲得最大符合計數值下的時延,而最大符合計數值的多少不重要,所以通過對所獲得的符合計數值進行歸一化處理,將符合計算得到的符合計數值的最大值歸一化為1,與實際得到的符合計數值得多少無關。最后通過對歸一化處理得到的離散的糾纏光二階關聯函數值進行數據擬合,得到最大值所對應的延時就是糾纏光的到達時間。
軟件實現符合測量過程中涉及3個參數:采集時間、符合門寬和延時增加步長。采集時間是數據采集模塊采集來自2個單光子探測器的電脈沖信號所用的時間;符合門寬是被視為同時到達的2個單光子到達的最大時間差;延時增加步長是相鄰2次符合計數之間給定的延時變化量。圖5是符合計數示意圖,它是在一個符合門寬時間范圍內,將時間序列CH1和CH2上同時存在脈沖的情況記為一次符合,并將符合計數值加1[9]。符合測量的具體過程為:在預計的一個延時的范圍內,一般為0~10ms,以1ps為延時增加步長,將延時范圍除以延時增加步長,得出最大循環次數;人為利用軟件給序列CH2加一個初始延時,初始延時一般為0,并對CH1和延時后的序列CH2進行符合計數,得到在給定的延時下的符合計數值。每次得到一個符合計數值之后,將施加的延時增加一個延時增加步長,再次符合計數得到又一個符合計數值,直到達到最大循環次數N,完成符合計算過程,得到在不同延時τj(j=1,2,3,…,N)下對應的符合計數值n(τj)。
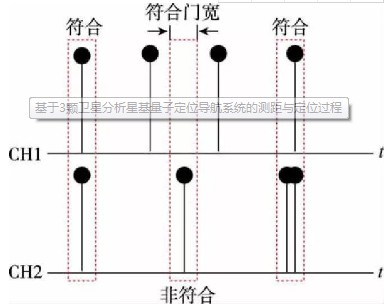
圖5符合計數示意圖

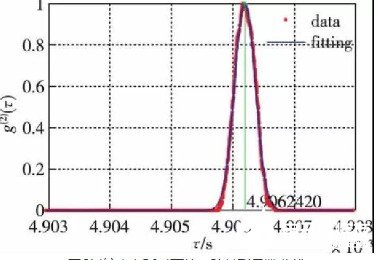
根據式(5),可以計算出向量A的值,然后,將所求出的A值與向量A中每一項-(Δt)2/q2、2Δt/q2和-1/q2值相對應,由此計算出參數Δt和q的值,將其代入式(3),得到糾纏光在延時τ下的一個二階關聯函數g(2)(τ)。此時,根據不同的時間延時τ,可以做出一個二階關聯函數曲線,該曲線上二階關聯函數的峰值對應的橫坐標就是糾纏光的TDOA。
圖6是通過符合測量得到的糾纏光在延時τ下的一個二階關聯函數曲線,其中,紅色點為歸一化后的離散樣本點,藍色實線為擬合和的二階關聯函數曲線,綠色實線對應擬合曲線的峰值點坐標,通過該曲線獲得的糾纏光TDOA為Δt=4.9062420×10-3s。
在糾纏光TDOA獲取的過程中,采集時間、符合門寬和延時增加步長3個參數會對糾纏光TDOA測量精度產生影響,具體的影響如下:1)采集時間越大,采集到單光子脈沖就越多,符合測量和數據擬合得到的TDOA就越接近真實值,在設計的系統中,采集時間等于10ms時,系統就已經達到最高精度,且采集時間越長,數據處理所占用的系統資源越多,計算時間越慢;2)符合門寬過大,符合計數得到的離散樣本點的值在一段延時范圍內均達到最大值,對這樣的樣本點擬合出的函數,最終得到的糾纏光TDOA是不夠準確的;符合門寬過小,符合計數得到的離散樣本點在峰值附近相對較稀疏,對它們數據擬合后得到的糾纏光TDOA也會存在較大誤差,一般將其選取為0.2ns;3)延時增加步長s越小,則符合計數得到的離散樣本點越密集,最終擬合出的糾纏光在延時τ下的二階關聯函數越接近實際情況,獲取到的糾纏光TDOA精度越高。
3基于到達時間差的量子測距、定位與導航
通過符合測量及其數據擬合所得到衛星Ri(i=1,2,3)發射的糾纏光的TDOAΔti,由糾纏光TDOA與衛星到用戶距離之間的關系,可以得到衛星到用戶之間的距離為
設3顆量子衛星的空間坐標分別為:R1(x1,y1,z1),R2(x2,y2,z2)和R3(x2,y2,z2),地面用戶的空間坐標為(x,y,z)。基于TDOA所獲得的衛星與用戶之間距離差的計算公式cΔti/2,以及衛星與用戶之間距離差與用戶坐標之間的關系,可以得到每一顆衛星與用戶之間距離與地面用戶坐標之間的關系公式:通過分別測量3顆衛星發射的糾纏光的TDOA,可以得到一個含有3個不同時間差以及用戶空間坐標的方程組為
(7)
聯立求解方程式(7),可獲得用戶的空間坐標(x,y,z)。
QPS通過超前瞄準模塊在運動的衛星與用戶之間維持星地光鏈路,實現對用戶的不間斷定位,獲取到用戶的連續運動軌跡,實現QPS的導航功能。
-
全球定位系統
+關注
關注
0文章
23瀏覽量
11033 -
導航
+關注
關注
7文章
533瀏覽量
42552 -
量子
+關注
關注
0文章
480瀏覽量
25557
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論