 STM32如何實現可調頻率、 占空比的PWM波形,且可指定輸出脈沖個數?
STM32如何實現可調頻率、 占空比的PWM波形,且可指定輸出脈沖個數?
讀者朋友“*imYan*”問:
pwm實現頻率可調和占空比可調后怎么來實現輸出10個脈沖呢?我這邊看有門控或者單脈沖加重復計數,黃老師平時用的什么方法?
我的回答:
使用兩個TIM定時器:一個輸出可調頻率、占空比的PWM,一個對輸出PWM脈沖計數(計時)。
1.門控方式能實現,但需要復雜的配置和計算,不推薦。
2.脈沖計數是比較實際,也是比較簡單的方式;
對輸出PWM脈沖計數(計時)方法有多種:
1.IO中斷計數,或同步定時中斷計數:用另外一個定時器,按照相同頻率中斷計數(類似IO中斷);
2.由PWM頻率和脈沖個數,計算輸出全部所需的時間,使用定時中斷,關閉輸出PWM;
3.利用定時器外部脈沖觸發(外部時鐘模式2功能),計數個數為所需脈沖個數(10個脈沖),則關閉輸出PWM;
ⅠSTM32定時器
STM32的TIM定時器少則五六個,多則二十個。 可能許多初學者覺得:那么多定時器用的完嗎? 那么多不是浪費嗎?
這么說吧,STM32的定時器功能非常強大,之所以有那么多定時器,原因在于使用定時器的地方有許多,本文要講的這個例子只是很基礎的一個例子。
當然,可能很多人想問:利用阻塞延時,控制IO高低變化輸出PWM這種方式就行啦,也很簡單。其實,這種方法的弊端很大。
1.輸出的PWM可能存在誤差;
2.對整個系統的實時性可能有影響;
所以不建議使用該方法。
Ⅱ幾種實現方法
使用兩個定時器配合輸出可調頻率、占空比的PWM波形,且可指定輸出脈沖個數的方法和原理其實不難。
輸出PWM的方法就是使用TIM定時器自帶有的PWM模式即可完成。主要難點在于還要控制指定輸出脈沖的個數。
對于如何控制輸出指定脈沖個數,下面大概說下三種方法:
1.脈沖中斷計數法
IO中斷,或者定時器同步(脈沖)中斷。
定時器同步(脈沖)中斷簡單的說,就是利用定時器同時產生一個相同頻率(或者說波形)的中斷信號,在中斷里面對其累計,累加個數為指定輸出波形個數則關閉PWM波形的輸出,同時關閉中斷計數。
比如:我輸出10個波形,10次中斷(每次+1)之后,關閉輸出。
它的原理,大致如下圖:
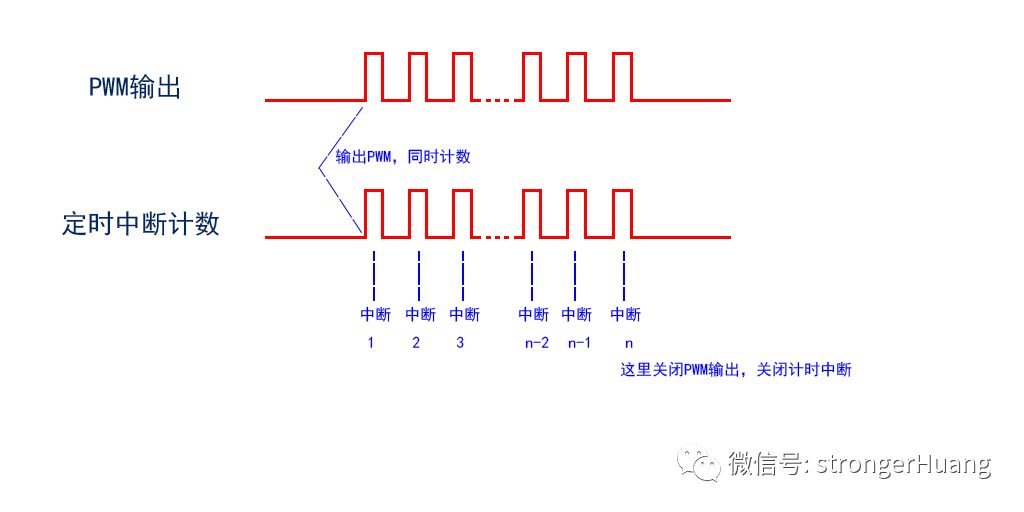
此方法建議在輸出高頻PWM時不要使用,頻繁中斷對系統實時性也是有一定影響。建議低于1KHz的PWM才使用此方法。
2.定時中斷法
基于上面第一種,不適合高頻PWM脈沖中斷。經過思考,我們是否可以將多次中斷的時間累加,只響應一次中斷。
原理就是把定時的時間設定為單個脈沖的n倍(n個脈沖),只使用一次中斷。
它的原理,大致如下圖:
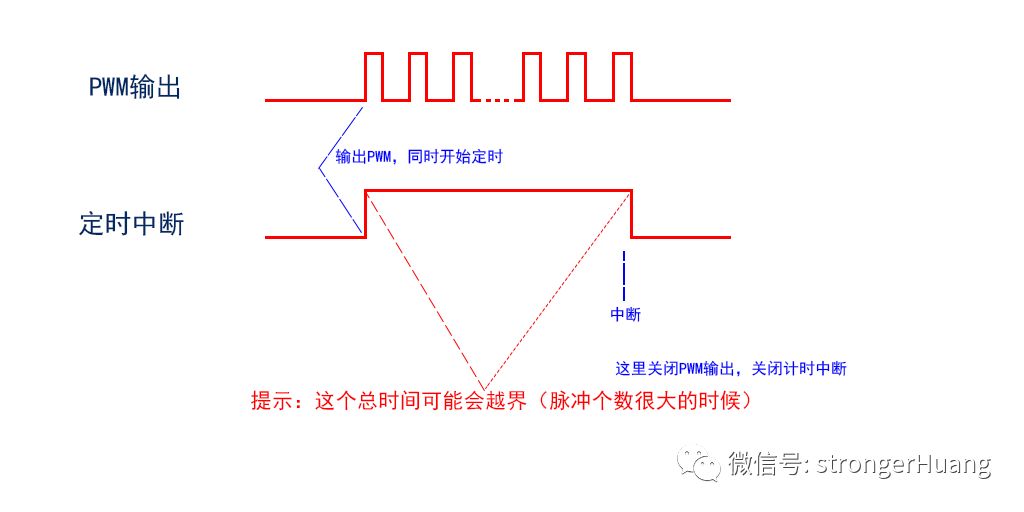
看圖片中的提示,建議這個地方使用一個32位的定時器,這個值可能很大。
3.脈沖觸發法
此方法可以避免上面兩種方法中不足的地方, 相對上面兩對實用性更強。電路上面,需要將PWM輸出的波形,連接到另一個定時器的ETR引腳。
它的原理沒什么特殊的,就是和我們常用的定時更新中斷類似,只是輸入信號改成PWM脈沖波形(默認為內部時鐘CK_INT 如:36M)。
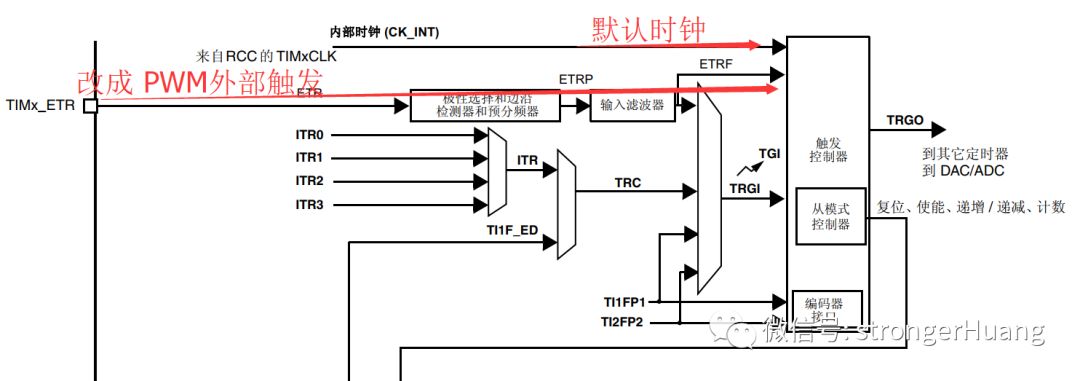
下面章節我就以該方法(第3種方法),PWM波形作為定時器的輸入時鐘的方式,用代碼給大家講述一下。
Ⅲ外部時鐘源模式2實現方法
上面說過,使用PWM作為另一個定時器的輸入時鐘,即可達到對PWM計數的功能。
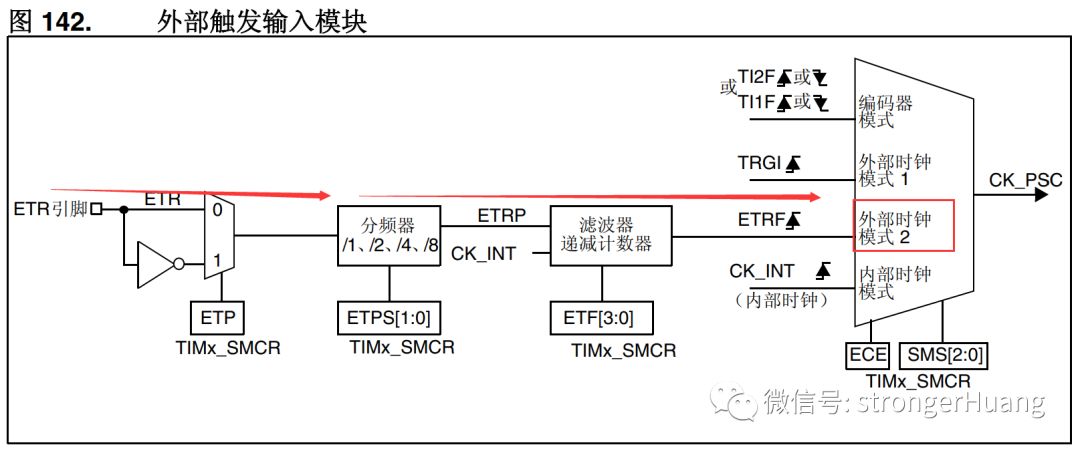
請參看手冊中TIM定時器時鐘選擇章節。
1.輸出PWM配置
/************************************************函數名稱 : PWM_TIM_Configuration功 能 : PWM輸出定時器配置參 數 : 無返 回 值 : 無作 者 : strongerHuang*************************************************/ void PWM_TIM_Configuration(void){ GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; /* 時鐘配置 */ RCC_APB1PeriphClockCmd(PWM_TIM_CLK, ENABLE); RCC_AHB1PeriphClockCmd(PWM_TIM_GPIO_CLK, ENABLE); GPIO_InitStructure.GPIO_Pin = PWM_TIM_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(PWM_TIM_GPIO_PORT, &GPIO_InitStructure); /* 映射配置 */ GPIO_PinAFConfig(PWM_TIM_GPIO_PORT, PWM_TIM_SOURCE, PWM_TIM_AF); /* 時基配置 */ TIM_TimeBaseStructure.TIM_Prescaler = PWM_PRESCALER; //預分頻值 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上計數 TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //定時周期 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分頻因子 TIM_TimeBaseInit(PWM_TIMx, &TIM_TimeBaseStructure); /* PWM模式配置 */ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM1模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能輸出 TIM_OCInitStructure.TIM_Pulse = 0xFFFF; //脈寬值 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性 PWM_TIM_OCxInit(PWM_TIMx, &TIM_OCInitStructure); TIM_Cmd(PWM_TIMx, DISABLE);}
初始化頻率和占空比填充的值是最大值,即TIM_Period = 0xFFFF;TIM_Pulse = 0xFFFF;實際沒有使能定時器(輸出的配置見下面函數接口)
2.選擇外部時鐘,定時中斷配置
/************************************************函數名稱 : CNT_TIM_Configuration功 能 : 計時定時器配置參 數 : 無返 回 值 : 無作 者 : strongerHuang*************************************************/ void CNT_TIM_Configuration(void){ GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; /* 時鐘配置 */ RCC_APB1PeriphClockCmd(CNT_TIM_CLK, ENABLE); RCC_AHB1PeriphClockCmd(CNT_TIM_GPIO_CLK, ENABLE); GPIO_InitStructure.GPIO_Pin = CNT_TIM_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(CNT_TIM_GPIO_PORT, &GPIO_InitStructure); /* 映射配置 */ GPIO_PinAFConfig(CNT_TIM_GPIO_PORT, CNT_TIM_SOURCE, CNT_TIM_AF); /* NVIC配置 */ NVIC_InitStructure.NVIC_IRQChannel = CNT_TIM_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = CNT_TIM_Priority; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); /* 使用外部時鐘源 */ TIM_ETRClockMode2Config(CNT_TIMx, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_Inverted, 0); /* 時基配置 */ TIM_TimeBaseStructure.TIM_Prescaler = 0; //預分頻值 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上計數 TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //定時周期 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分頻因子 TIM_TimeBaseInit(CNT_TIMx, &TIM_TimeBaseStructure); TIM_ClearFlag(CNT_TIMx, TIM_FLAG_Update); TIM_ITConfig(CNT_TIMx, TIM_IT_Update, ENABLE); //使能"更新"中斷 TIM_Cmd(CNT_TIMx, DISABLE);}
和常規的不同點在于: 使用外部時鐘源
TIM_ETRClockMode2Config(CNT_TIMx, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_Inverted, 0);
注意檢測(捕獲)極性TIM_ExtTRGPolarity_Inverted,一般PWM都是高電平為脈沖波形,下降沿才算一個波形的計數。
3.輸出PWM函數接口
/************************************************函數名稱 : PWM_Output功 能 : 輸出PWM參 數 : Frequency --- 頻率 Dutycycle --- 占空比(12代表占空比為12%) NumPulse --- 脈沖個數返 回 值 : 無作 者 : strongerHuang*************************************************/ void PWM_Output(uint32_t Frequency, uint32_t Dutycycle, uint32_t NumPulse){ uint32_t pwm_period; uint32_t pwm_pulse; /* 輸出PWM */ pwm_period = PWM_CK_CNT/Frequency - 1; //計算出計數周期(決定輸出的頻率) pwm_pulse = (pwm_period + 1)*Dutycycle / 100; //計算出脈寬值(決定PWM占空比) TIM_Cmd(PWM_TIMx, DISABLE); //失能TIM TIM_SetCounter(PWM_TIMx, 0); //計數清零 TIM_SetAutoreload(PWM_TIMx, pwm_period); //更改頻率 PWM_TIM_SetComparex(PWM_TIMx, pwm_pulse); //更改占空比 TIM_Cmd(PWM_TIMx, ENABLE); //使能TIM /* 脈沖個數計時 */ TIM_Cmd(CNT_TIMx, DISABLE); TIM_SetCounter(CNT_TIMx, 0); TIM_SetAutoreload(CNT_TIMx, NumPulse-1); //設置中斷更新數 TIM_ClearFlag(CNT_TIMx, TIM_FLAG_Update); TIM_Cmd(CNT_TIMx, ENABLE);}
void PWM_Output(uint32_t Frequency, uint32_t Dutycycle, uint32_t NumPulse);
我們只需要調用該函數接口就可以實現指定個數PWM輸出了。中途不用軟件參數,輸出結束時自動響應定時中斷,關閉定時器。
中斷接口函數
/************************************************函數名稱 : CNT_TIM_IRQHandler功 能 : 計時中斷參 數 : 無返 回 值 : 無作 者 : strongerHuang*************************************************/ void CNT_TIM_IRQHandler(void){ if(TIM_GetITStatus(CNT_TIMx, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(CNT_TIMx, TIM_IT_Update); TIM_Cmd(PWM_TIMx, DISABLE); //關閉PWM輸出 TIM_Cmd(CNT_TIMx, DISABLE); //關閉計數 }}
Ⅳ實際效果和代碼
為方便大家,提供了一個簡單裸機程序:
int main(void){ System_Initializes(); while(1) { LED_TOGGLE(); //LED變化 Delay(5); //延時(約240ms) PWM_Output(1000, 20, 10); //1KHz, 20%占空比, 10個脈沖 }}
main函數中實現效果:間隔240ms(軟件延時不精確)輸出10個PWM波形
波形具體情況:輸出1KHz, 20%占空比, 10個脈沖精確的PWM波形
下載地址(STM32F401為例工程,STM32其他芯片類似):
鏈接:https://pan.baidu.com/s/10GPPxCky8SZmU9S9pleqJg
密碼:4jf3
-
PWM
+關注
關注
114文章
5198瀏覽量
214879 -
STM32
+關注
關注
2272文章
10923瀏覽量
357567 -
輸出脈沖
+關注
關注
0文章
4瀏覽量
6366
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論