") 電伺服焊接控制器握手程序用法分析
電伺服焊接控制器握手程序用法分析
適用版本KUKA 8.3系統(tǒng)
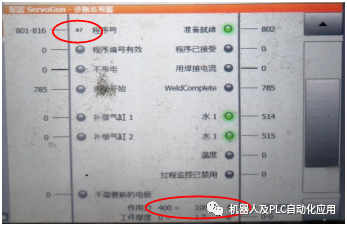
用于電伺服焊鉗在調(diào)用程序前的自我檢查與焊接控制器的通訊,即我給你程序序號調(diào)用91焊程序后,焊接控制器給力值400到機器人機器人反饋給焊接控制400的IO信號。用以判斷通訊的好壞,數(shù)值傳輸?shù)臏蚀_性,起到監(jiān)控的作用!
接口故障,會觸發(fā)A789(重置步進觸點錯誤)進行故障復位,重新進行連接,連接后才能進行焊接程序的發(fā)出。
下面讓我們詳細分析一下:
在軌跡預執(zhí)行中調(diào)用,判斷通訊連接情況。
在軌跡點處再次進行判斷調(diào)用。
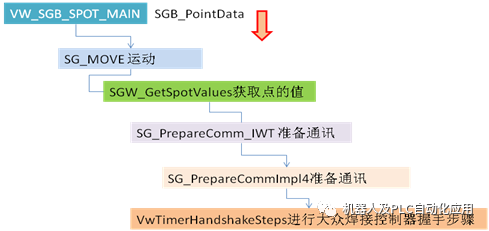

SG_CheckProgNum_WT[1]:91有效檢查程序號
每次焊接都要用到的握手程序91,BOSCH力值是400
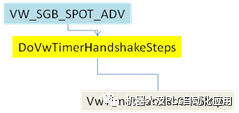
大眾焊接控制器握手步驟傳送程序號
VwTimerHandshakeSteps(PrepCommStep, Point_DATA, timeOutextension)
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16448瀏覽量
179483 -
焊接
+關注
關注
38文章
3229瀏覽量
60131 -
伺服
+關注
關注
16文章
653瀏覽量
41104
原文標題:VwTimerHandshakeSteps-電伺服焊接控制器握手程序用法分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
電機控制器與伺服系統(tǒng)的關系
在自動化控制系統(tǒng)中,電機控制器和伺服系統(tǒng)是實現(xiàn)精確運動控制的關鍵組件。電機控制器負責接收控制信號
恒功率脈沖焊接控制器的創(chuàng)新應用與優(yōu)勢分析
能耗的效果。而恒功率脈沖焊接控制器作為這一技術的關鍵組成部分,不僅能夠確保焊接過程的穩(wěn)定性和重復性,還為焊接工藝的優(yōu)化提供了新的可能。本文將從恒功率脈沖

精密逆變焊接控制器的創(chuàng)新應用與未來發(fā)展
精密逆變焊接控制器作為現(xiàn)代焊接技術中的關鍵組成部分,其創(chuàng)新應用不僅提升了焊接質(zhì)量,還極大地提高了生產(chǎn)效率和安全性。隨著科技的發(fā)展,精密逆變焊接
多頻點焊控制器的創(chuàng)新應用與優(yōu)勢分析
控制器的基本原理出發(fā),探討其在不同領域的創(chuàng)新應用,并分析其相對于傳統(tǒng)點焊控制器的優(yōu)勢。
多頻點焊控制器通過使用多個頻率的電流進行焊接,
恒流恒壓焊接控制器的精準應用與優(yōu)勢分析
恒流恒壓焊接控制器在現(xiàn)代工業(yè)生產(chǎn)中扮演著至關重要的角色,特別是在精密制造領域,其精準的應用和顯著的優(yōu)勢使其成為眾多企業(yè)的首選。本文將深入探討恒流恒壓焊接控制器的具體應用及其帶來的多方面
直流變頻焊接控制器:先進技術在焊接領域的革新應用探索
如何重塑焊接工藝流程,以及其在實際生產(chǎn)中的價值體現(xiàn)。
首先,我們來剖析直流變頻焊接控制器的基本原理與特點。相較于傳統(tǒng)的焊接控制方式,直
伺服控制器的常見故障及解決方法
伺服控制器作為工業(yè)自動化領域的核心部件,其穩(wěn)定性和可靠性對于整個系統(tǒng)的運行至關重要。然而,在實際應用中,伺服控制器也會遇到各種故障。本文將對伺服
西門子PLC與伺服控制器如何通訊
在工業(yè)自動化領域中,西門子PLC(Programmable Logic Controller,可編程邏輯控制器)與伺服控制器之間的通訊是實現(xiàn)高效、精確控制的關鍵環(huán)節(jié)。本文旨在詳細闡述西
伺服控制器與PLC的區(qū)別
在現(xiàn)代工業(yè)自動化領域中,伺服控制器(Servo Controller)和可編程序控制器(Programmable Logic Controller,簡稱PLC)是兩個至關重要的控制設備
伺服控制器的工作原理和基本結構
伺服控制器,作為工業(yè)自動化和精密控制領域的核心部件,其工作原理和基本結構對于理解和應用伺服系統(tǒng)至關重要。本文將詳細闡述伺服
伺服電機控制器怎么調(diào)參數(shù)
伺服電機控制器參數(shù)調(diào)整是確保伺服系統(tǒng)正常運行和達到預期性能的關鍵步驟。本文將詳細介紹伺服電機控制器的參數(shù)調(diào)整方法,包括基本原理、常見參數(shù)、調(diào)
伺服驅(qū)動器和伺服控制器的區(qū)別
在工業(yè)自動化和精密控制領域中,伺服驅(qū)動器和伺服控制器是兩個至關重要的組件,它們各自在伺服系統(tǒng)中扮
伺服控制器編碼器干擾怎么解決
伺服控制器編碼器干擾問題在工業(yè)自動化領域中非常常見,它會影響到伺服系統(tǒng)的穩(wěn)定性和精度。本文將從多個方面詳細分析
伺服控制器編碼器反饋數(shù)值為負數(shù)怎么回事
伺服控制器編碼器反饋數(shù)值為負數(shù)是一個相對復雜的問題,涉及到多個方面。在這篇文章中,我們將從以下幾個方面進行詳細分析:伺服
伺服控制器編碼器信號輸出怎么接
伺服控制器編碼器信號輸出接線是伺服系統(tǒng)設計和安裝過程中的一個重要環(huán)節(jié)。本文將詳細介紹伺服控制器編





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論