") 微型軟體機器人在體內(nèi)/體外生物醫(yī)學(xué)研究中具備廣泛應(yīng)用
微型軟體機器人在體內(nèi)/體外生物醫(yī)學(xué)研究中具備廣泛應(yīng)用
微型軟體機器人在體內(nèi)/體外生物醫(yī)學(xué)研究中具有廣泛的應(yīng)用前景。近年來,柔性機器人的驅(qū)動和運動研究方面已取得了大量的成果,但在環(huán)境感知、遠程信號傳輸?shù)确矫孢€存在較大的挑戰(zhàn),離實際應(yīng)用還有不小的距離。香港城市大學(xué)(香港城大)領(lǐng)導(dǎo)的研究團隊基于此前研發(fā)的多足軟體機器人(Nat.Com. 2018,9(1): 1-7)及微能源收集技術(shù)(Joule 2018, 2(4): 642-697),在微型機器人上集成了驅(qū)動、感知、信號傳輸?shù)葐卧ㄟ^耦合磁效應(yīng)和壓電效應(yīng),研制了一種可進行遠程控制移動、周圍環(huán)境感知和遠程通訊為一體的無栓系微型軟體機器人。
相關(guān)成果由香港城大的申亞京課題組與楊征保課題組以《基于耦合磁效應(yīng)和壓電效應(yīng)實現(xiàn)遠程控制移動、感知和通訊的毫米級軟體機器人》(Battery-Less SoftMillirobot That Can Move, Sense, and Communicate Remotely by Couplingthe Magnetic and Piezoelectric Effects)為題目,于近日發(fā)表在綜合期刊《尖端科學(xué)》(Adv. Sci.2020, DOI:10.1002/advs.202000069)上。
該微型機器人將機器人驅(qū)動單元和感知單元集成在一個多層薄膜(《0.5 mm)內(nèi),下部的仿生多足磁性復(fù)合材料肢體可提供驅(qū)動力,而柔性壓電陶瓷復(fù)合薄膜可提供感知功能。論文的共同第一作者,香港城大生物醫(yī)學(xué)工程學(xué)系博士后陸豪健說:“現(xiàn)階段對于微型軟體機器人來說,感知能力與運動性能的完美集成是一個挑戰(zhàn)。這項工作借鑒了此前工作多足結(jié)構(gòu)的設(shè)計以保證其運動性能,同時利用射頻識別技術(shù)(RFID),將三個重要模塊,即上層的近場通信(NFC)電子模塊,中間的壓電感知(PEG)模塊和底部的多足軟體驅(qū)動(MSR)模塊(如圖1所示)集成在總體尺寸小于10×30 mm2的機器人上,其大小僅與指尖相當(dāng)。在外部的磁驅(qū)動下,該微型軟體機器人可實現(xiàn)遠程驅(qū)動、環(huán)境監(jiān)控和無線通信,而無需任何負載電池或外部有線電源。”
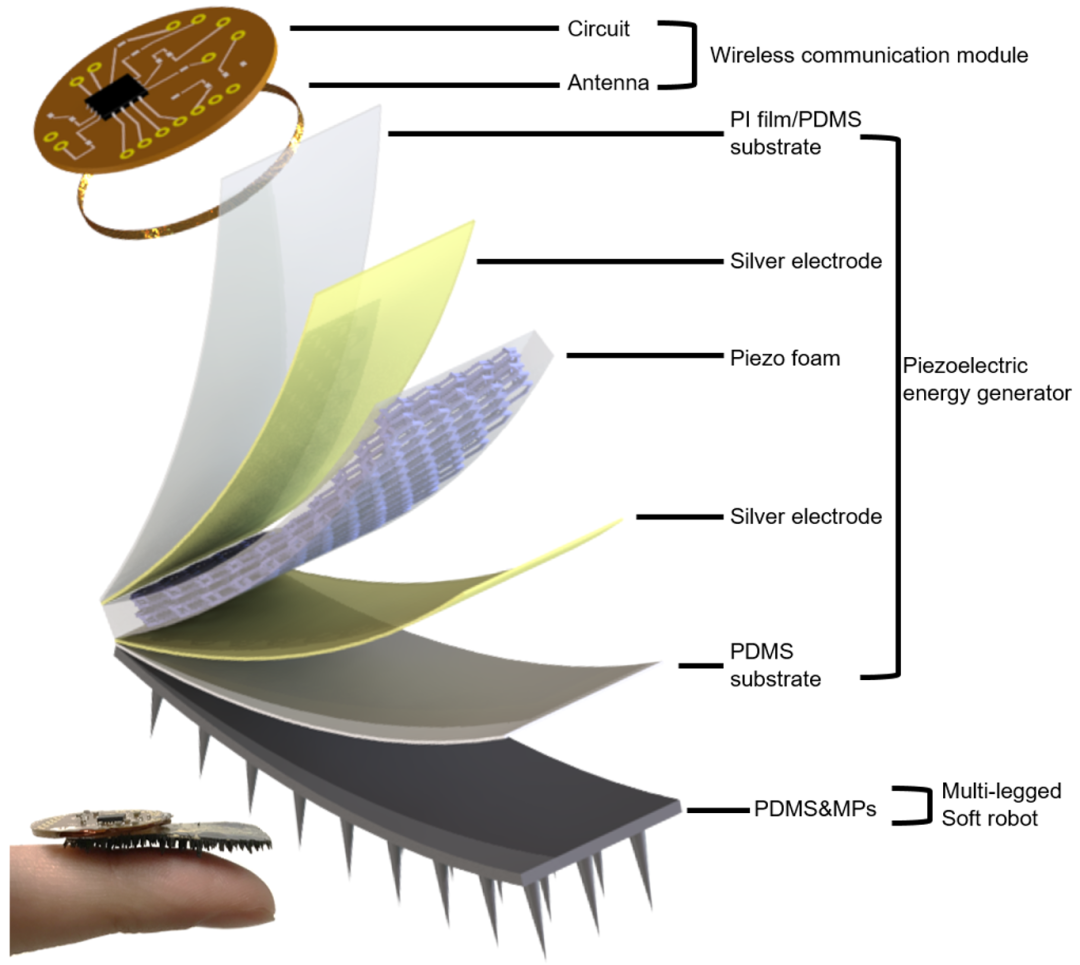
圖1 無栓系微型軟體機器人的三個組成模塊
此前,香港城市大學(xué)(香港城大)領(lǐng)導(dǎo)的研究團隊研發(fā)了一種可在干燥和濕潤環(huán)境下運動的仿生多足軟體機器人,該機器人可以通過磁場的控制,用拍打的方式或左右擺動的方式運動,并且可以負載超過自身重量百倍的物體移動,在生物醫(yī)學(xué)領(lǐng)域具有重要應(yīng)用(如圖2所示)。
圖2 仿生多足軟體機器人的運動
此次研發(fā)的機器人,在此基礎(chǔ)之上集成了三個重要模塊,分別承擔(dān)信號傳輸,傳感識別和運動驅(qū)動的任務(wù)。其中NFC的使用可以使無線通信模塊能夠獲取無線信號并將數(shù)據(jù)傳輸?shù)饺魏蜰FC支持的消費類設(shè)備,例如智能手機和計算機。PEG模塊由壓電陶瓷復(fù)合材料(鋯鈦酸鉛PZT和聚二甲基硅氧烷PDMS),兩層銀電極和基底(PI膜和PDMS膜)構(gòu)成,其產(chǎn)生的壓電信號能夠用于對外界環(huán)境的感知。MSR模塊由PDMS和磁性顆粒復(fù)合材料構(gòu)成,其下方獨特的多足設(shè)計減少了軟體機器人運動的表面接觸面積。
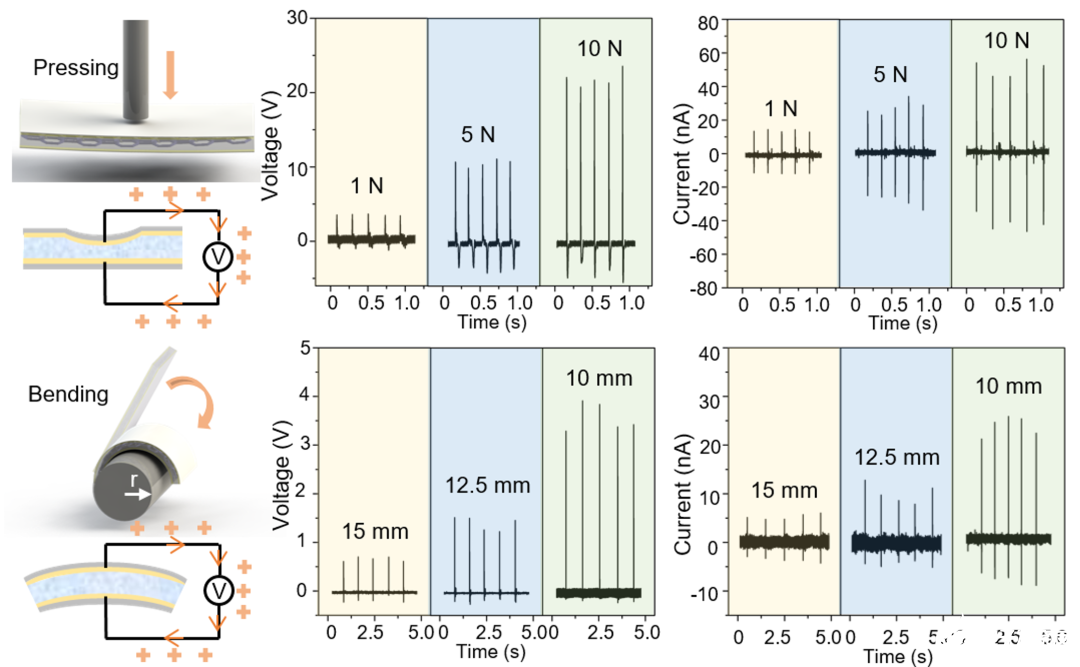
圖3 PEG模塊在不同壓力和彎曲狀態(tài)下的壓電響應(yīng)
除了多功能的集成,用于制作壓電感知模塊(PEG)的設(shè)計也很重要。論文的共同第一作者,香港城大機械工程學(xué)系在讀博士生洪穎說:“與傳統(tǒng)的將壓電陶瓷粉末和高分子材料直接混合制成的壓電陶瓷/高分子復(fù)合材料不同的是,這次我們基于紙模板制備了一種具有連續(xù)3D陶瓷框架的壓電泡沫復(fù)合材料,讓其具有更好的機械特性和壓電特性(如圖3所示)。與傳統(tǒng)方法相比,這種無縫集成的全軟體結(jié)構(gòu),能夠很好地發(fā)揮全軟體機器人的優(yōu)勢。”
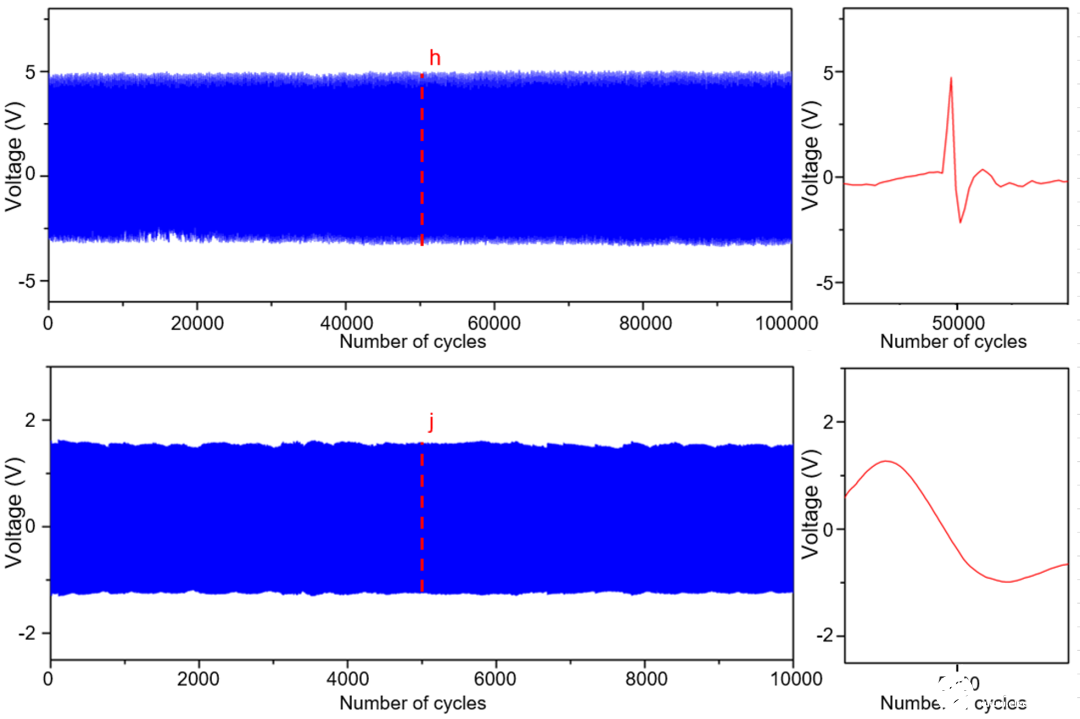
圖4 PEG模塊分別在壓縮和彎曲狀態(tài)下的循環(huán)特性
洪穎補充道:“此外,這種壓電陶瓷復(fù)合材料同時具有很好的抗疲勞特性,在十萬次壓縮及一萬次彎曲循環(huán)中都能保持很好的壓電響應(yīng)(如圖4所示),保證了機器人的運動能力。”
圖5 微型軟體機器人的運動及其產(chǎn)生的壓電信號
在實驗中,通過外界磁場的控制,微型軟體機器人可以以拍打的方式向前移動,其本身的PEG模塊可以產(chǎn)生相應(yīng)的壓電信號(如圖5所示)。值得指出的是,機器人運動所產(chǎn)生的壓電信號會隨著接觸界面的不同而發(fā)生變化,例如剛性平面界面可以產(chǎn)生突變信號峰,剛性臺階界面導(dǎo)致信號峰值降低,柔性臺階界面可以得到一個非常平穩(wěn)的信號波,液體界面由于表面張力的影響會產(chǎn)生雙峰信號。“在運動過程中,機器人的針狀足,就像無數(shù)個AFM探針一樣不斷地對周圍環(huán)境進行掃描(如圖6所示),我們期望將來能將這種技術(shù)用于體內(nèi)不同區(qū)域的檢查,如是否發(fā)生病變等。”陸豪健博士說道。
圖6 微型軟體機器人通過不同界面時的壓電響應(yīng)
責(zé)任編輯:pj
-
微軟
+關(guān)注
關(guān)注
4文章
6630瀏覽量
104469 -
機器人
+關(guān)注
關(guān)注
211文章
28642瀏覽量
208424 -
感知
+關(guān)注
關(guān)注
1文章
66瀏覽量
12184
發(fā)布評論請先 登錄
相關(guān)推薦
伺服電動缸在人形機器人中的應(yīng)用
安泰:1600V高電壓放大器生物研究超聲測試怎么做
高壓放大器在水下?lián)湟?b class='flag-5'>軟體機器人研究中的應(yīng)用

高壓放大器在軟體機器人特性測試中的應(yīng)用

基于漩渦湍流輔助的微流控平臺,可實現(xiàn)類精子結(jié)構(gòu)的微型機器人一步成型

醫(yī)療機器人有哪些_醫(yī)療機器人有哪些應(yīng)用
BioMEMS的原理、結(jié)構(gòu)及應(yīng)用
高壓放大器在介電彈性體折紙術(shù)軟體機器人中的應(yīng)用

清華大學(xué):軟體機器人柔性傳感技術(shù)最新研究進展

微型導(dǎo)軌:手術(shù)機器人的高精度“骨骼”

北卡羅來納州立大學(xué):加速外骨骼機器人控制系統(tǒng)的研發(fā)
協(xié)作機器人在食品和飲料中的的應(yīng)用
Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應(yīng)用

Aigtek安泰電子第一屆全國等離子體生物醫(yī)學(xué)學(xué)術(shù)會議圓滿結(jié)束!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論