") KUKA機器人interbus使用之IBSPCI1文件之詳解
KUKA機器人interbus使用之IBSPCI1文件之詳解
KUKA機器人INTERBUS相關(guān)文件的作用:
?用戶權(quán)限:專家模式。為了編輯機器人程序以外的文件
?選擇文件和編輯
?或者:通過按組合鍵切換到Windows
配置和驅(qū)動程序文件:
ISA和PCI卡:
?C:... INIT IOSYS.INI:I / O系統(tǒng)的配置文件.
PCI卡:
?C: ... INIT IBSPCI1.INI:Interbus驅(qū)動程序的參數(shù)化文件
?C: ... DRIVERS IBPCIDRV.O:所有Interbus PCI卡的驅(qū)動程序
IOSYS.INI
由于其在將外圍設(shè)備連接到機械手方面的核心作用,因此I / O系統(tǒng)的此配置文件始終安裝在主分區(qū)上。
IBSPCI1.INI
文件IBSPCI1.INI位于控制器的Init目錄中。它包含Interbus PCI卡的參數(shù)化數(shù)據(jù)。
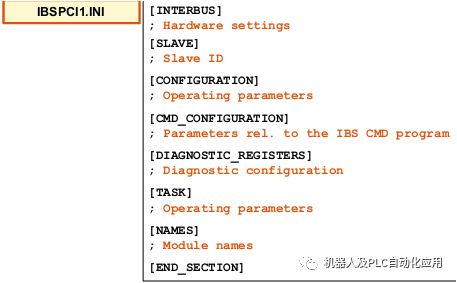
INTERBUS]這主要是用來通知驅(qū)動程序在控制器板上進行的硬件設(shè)置。
[SLAVE]該部分影響Interbus控制器板從屬部分的行為。
[CONFIGURATION]在此設(shè)置Interbus控制器板常規(guī)操作方法的各種參數(shù)。
[CMD_CONFIGURATION]此處,將Interbus卡設(shè)置為使用程序IBS CMD的任務(wù)。
[DIAGNOSTIC_REGISTERS]這些參數(shù)可以通過I / O系統(tǒng)的過程數(shù)據(jù)映像(無CMD配置)訪問卡的內(nèi)部診斷寄存器。
[TASK]此部分可用于控制驅(qū)動程序的獨立性。
[NAMES]通過在此處為Interbus網(wǎng)段和模塊分配名稱,可以使您的系統(tǒng)更加用戶友好,例如,發(fā)生錯誤時,此處存儲的文本將顯示在GUI的消息窗口中。
硬件參數(shù)部分:

必須正確設(shè)置本節(jié)中的參數(shù),才能使Interbus連接正常運行。插圖中指定的值對應(yīng)于默認設(shè)置,該設(shè)置在系統(tǒng)出廠時由KUKA預(yù)裝時有效。一些參數(shù)控制了底層控制計算機的硬件接口的保留,而其他系統(tǒng)組件可能不會同時使用這些保留。
BOARDNUMBER = 1(必需)
板號用于為IBS卡分配明確的標(biāo)識符。
控制器用來將自身標(biāo)識為更高級別的Interbus主站的從站ID。
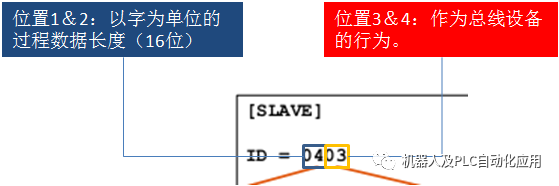
數(shù)值必須以十六進制形式輸入。例如:16個字的輸入和輸出:ID = 1003
ID = LLTT(可選,對于PCP流量是必需的)
ID的指定值由兩部分組成,它們被解釋為十六進制數(shù)。前兩個位置以字s表示過程數(shù)據(jù)長度,控制板用來與高層Interbus交換過程數(shù)據(jù)。
LL = { 01, ..., 10 }
最后兩個位置描述了卡如何充當(dāng)總線設(shè)備,以及卡支持PCP通信的數(shù)據(jù)寬度。
TT:
03:帶數(shù)字量輸入和輸出的系統(tǒng)耦合器
E8:帶有2個PCP字的系統(tǒng)耦合器
E9:帶有4個PCP字的系統(tǒng)耦合器
EB:帶有一個PCP字的系統(tǒng)耦合器
如果存在此參數(shù),則此信息將始終覆蓋Interbus卡上的DIP開關(guān)的設(shè)置。從站ID只能設(shè)置一次。為了將從站ID重新分配給控制器板,必須中斷從站連接的電源。
IBSPCI1.INI文件解讀:
SLAVERING 從動
= 1(默認)=>初始化從站并生成錯誤消息。
= 0 =>從設(shè)備未初始化,并且不會生成任何錯誤消息。
SWAP_SLAVE_BYTES
選項SWAP_SLAVE_BYTES可用于指定驅(qū)動程序自動交換(從設(shè)備的)字節(jié)。
CONTINUE_BY_ERR
如果此標(biāo)志設(shè)置為0,則在從屬環(huán)發(fā)生故障時,將禁用驅(qū)動器的讀寫功能。直到消除了從屬環(huán)中的故障后,才能再次啟用讀取和寫入功能。
MASTER_TO_SLAVE_OK
INI文件中的該條目可用于在高層環(huán)網(wǎng)中提供位,以指示控制器中的Interbus驅(qū)動程序仍處于“正在運行”狀態(tài)。只要驅(qū)動程序處于“ 正在運行”狀態(tài),如果發(fā)生故障或尚未開始,則將其重置。這樣就無法再從控制器設(shè)置或重置該位。IN I文件中的條目解釋如下:
0 =>未設(shè)置位
1-n =>從站的起始地址之后,在從站的I / O輸出存儲器中的位位置。
重新啟動或熱啟動之后,直到寫入輸出數(shù)據(jù)后,該位置位。
WATCHDOG = 0 ... 7(可選a7}(可選)
= 0(默認)=>卡上的看門狗未激活。
> 0 =>卡上的看門狗已激活。每次讀取數(shù)據(jù)都會觸發(fā)卡上的看門狗。如果未在指定時間內(nèi)觸發(fā)看門狗,則IBS停止,并且在GUI上顯示相應(yīng)的錯誤消息。指定的值根據(jù).
以下列表:
(7 = 16.4毫秒,6 = 32.8毫秒,5 = 65.5毫秒,4 = 131.1毫秒,3 = 262.1毫秒,2 = 524.3毫秒,1 = 1048.6毫秒。)
僅當(dāng)在IOSYS.INI中還配置了輸入時,才激活看門狗,因為僅在“讀取”功能中觸發(fā)了看門狗,并且僅在還配置了輸入時才調(diào)用“讀取”功能。
MASTERRING = 0、1(可選)
此參數(shù)通知駕駛員是否要激活(1)Interbus卡的主連接(0)。
LOGFILE = logibuspci.log (例)
日志文件的名稱。指定日志文件名將激活日志記錄功能。可以指定名稱及其路徑(相對于KRC目錄)。默認設(shè)置為無名稱且無日志記錄。
CONTINUE_WITH WARNING = {0,1}(可選)
如果將此參數(shù)設(shè)置為1,則在發(fā)生總線故障時,驅(qū)動程序?qū)⒗^續(xù)處理。如果值為0,則驅(qū)動程序的行為與總線錯誤相同,即它會停止過程數(shù)據(jù)通信。
PASSIVE_UPDATE = {0,1}(可選)
在主環(huán)中發(fā)生總線故障時,驅(qū)動程序的輸入映像將被凍結(jié),這意味著控制器無法再將其狀態(tài)發(fā)送給從屬環(huán)中的更高級別的主控制器。如果將此參數(shù)設(shè)置為1,驅(qū)動程序?qū)⒗^續(xù)讀取輸入。
SWAP_MASTER_BYTES
該條目可用于指定要交換(主模塊中的模塊的)字節(jié)
由駕駛員自動執(zhí)行。但是,對于數(shù)字模塊,驅(qū)動程序僅執(zhí)行此交換。
沒有交換模擬模塊。
= 0(默認),禁用交換。
= 1交換激活。
RESET 重啟
為了在系統(tǒng)啟動時將控制板設(shè)置為定義的狀態(tài),可以在初始化控制板之前執(zhí)行復(fù)位。
= 0當(dāng)IBS驅(qū)動程序啟動時,不執(zhí)行任何復(fù)位。
= 1(默認值)當(dāng)驅(qū)動程序啟動時執(zhí)行復(fù)位;系統(tǒng)最多等待15秒鐘,以進行復(fù)位并讓控制器再次運行。如果在這15秒鐘內(nèi)無法對控制板進行尋址,則驅(qū)動程序的啟動將中止。
= 2-n在這里,與設(shè)置1一樣,將進行復(fù)位,并且系統(tǒng)將等待指定的秒數(shù)。如果在指定的時間后無法對控制板進行尋址,則驅(qū)動程序的啟動將中止。
CHECKLEVEL
= 0(默認)=>不檢查配置。
= 1 =>將為主機配置的I / O位的數(shù)量與實際存在的模塊進行比較;在不準(zhǔn)確的情況下,驅(qū)動程序的加載將中止。此處考慮了INACCURACY下的規(guī)范。
INACCURACY不準(zhǔn)確
配置檢查的準(zhǔn)確性(即,IOSYS.INI中可配置的位數(shù)比連接到IBS的位數(shù)多)。
默認設(shè)置為0。
BAUDRATE = {1200、2400、4800、9600}(可選)
您可以使用這些參數(shù)設(shè)置Interbus卡上串行接口的傳輸速率。僅當(dāng)在KRC的PC上操作了CMD軟件時,才需要設(shè)置1200波特(請參見“ CMD”一章)。
CMD_FILE =項目文件路徑(邏輯尋址所必需)
此參數(shù)用于告訴驅(qū)動程序要加載哪個Interbus項目文件。在通過IBS CMD程序配置了總線結(jié)構(gòu)之后,您可以將該Interbus項目保存為一種特殊的文件格式,該格式可以由Interbus卡評估。這些文件以.SVC結(jié)尾。參數(shù)CMD_FILE只能與具有邏輯Interbus尋址的I / O配置一起使用。
EXTERN_START={ 0, 1 }(optional)
如果EXTERN_START為1,則驅(qū)動程序希望將引導(dǎo)項目保存在Interbus卡上。否則,EXTERN_START必須設(shè)置為0。
STATUS =字節(jié)偏移量(可選)
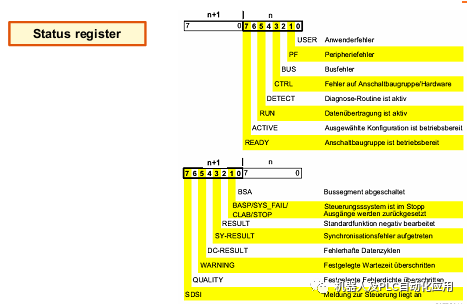
這將導(dǎo)致Interbus控制器板的I / O映射中的位置保留給狀態(tài)字。可以通過IOSYS.INI中的分配使?fàn)顟B(tài)字可被控制器訪問。
PARAMETER =字節(jié)偏移量(可選)
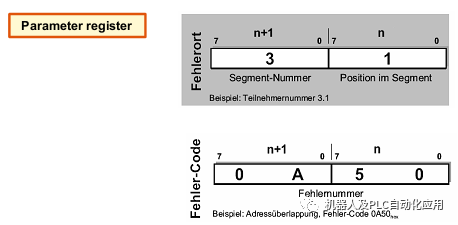
這將使Interbus控制器板的I / O映射中的位置保留給參數(shù)字。可以通過IOSYS.INI中的分配使參數(shù)字可供控制器訪問。參數(shù)寄存器內(nèi)容的含義取決于當(dāng)前活動的狀態(tài)位。
PARAMETER2=Byte offset
這將導(dǎo)致Interbus控制器板的I / O映射中的位置保留給Interbus卡的第二個參數(shù)字。可以通過IOSYS.INI中的分配使該附加參數(shù)字可供控制器訪問。
AUTORESTART =時間(可選)
“任務(wù)”部分的參數(shù)接收總線故障后驅(qū)動程序在等待自動嘗試重新啟動之前等待的時間(以秒為單位)。值為零(0)時,驅(qū)動器不會進行任何自動重啟嘗試。
NIndex= Seg.Mod:Name(可選)
這里的“索引”是一個序號> = 1。條目Seg指定段號,Mod表示總線設(shè)備的位置。在冒號之后輸入Interbus模塊的名稱(最多18個字符)。
-
驅(qū)動程序
+關(guān)注
關(guān)注
19文章
848瀏覽量
48219 -
KUKA機器人
+關(guān)注
關(guān)注
4文章
143瀏覽量
9180
原文標(biāo)題:KUKA機器人interbus使用之IBSPCI1文件之詳解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
開源項目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動作的機器人—Tillu
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
協(xié)作機器人拽拖示教詳解
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
工業(yè)機器人仿真軟件有哪些
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論