 經典PID控制器的積分分離優化算法
經典PID控制器的積分分離優化算法
我們已經講述了PID控制器的實現,包括位置型PID控制器和增量型PID控制器。但這個實現只是最基本的實現,并沒有考慮任何的干擾情況。在本節及后續的一些章節,我們就來討論一下經典PID控制器的優化與改進。這一節我們首先來討論針對積分項的積分分離優化算法。
1、基本思想
我們已經講述了PID控制引入積分主要是為了消除靜差,提高控制精度。但在過程的啟動、結束或大幅度增減設定值時,短時間內系統輸出有很大偏差,會造成PID運算的積分累積,引起超調或者振蕩。為了解決這一干擾,人們引入了積分分離的思想。其思路是偏差值較大時,取消積分作用,以免于超調量增大;而偏差值較小時,引入積分作用,以便消除靜差,提高控制精度。
具體的實現步驟是:根據實際情況,設定一個閾值;當偏差大于閾值時,消除積分僅用PD控制;當偏差小于等于閾值時,引入積分采用PID控制。則控制算法可表示為:

其中β稱為積分開關系數,其取值范圍為:
由上述表述及公式我們可以知道,積分分離算法的效果其實與ε值的選取有莫大關系,所以ε值的選取實際上是實現的難點,ε值過大則達不到積分分離的效果,而ε值過小則難以進入積分區,ε值的選取存在很大的主觀因素。
對于經典的增量式PID算法,似乎沒有辦法由以上的公式推導而來,因為β隨著err(k)的變化在不是修改著控制器的表達式。其實我們可以換一種角度考慮,每次系統調節未定后,偏差應該為零,然后只有當設定值改變時,系統才會響應而開始調節。設定值的改變實際上是一個階躍變化,此時的控制輸出記為U0,開始調節時,其調節增量其實與之前的一切沒有關系。所以我們就可以以變化時刻開始為起點,而得到帶積分分離的增量算法,以保證在啟動、停止和快速變化時防止超調。公式如下:

其中β的取值與位置型PID算法一致。可能有人會擔心偏差來回變化,造成積分作用的頻繁分離和引入,進而使上述的增量表達式無法實現。其實我們分析一下就能發現,在開始時,由于設定值變化引起的偏差大而分離了積分作用,在接近設定值時,偏差變小就引入了積分,一邊消除靜差,而后處于穩態,直到下一次變化。
2、算法實現
這一部分,我們根據前面對其基本思想的描述,來實現基于積分分離的PID算法實現,同樣是包括位置型和增量型兩種實現方式。首先我們來看一下算法的實現過程,具體的流程圖如下:
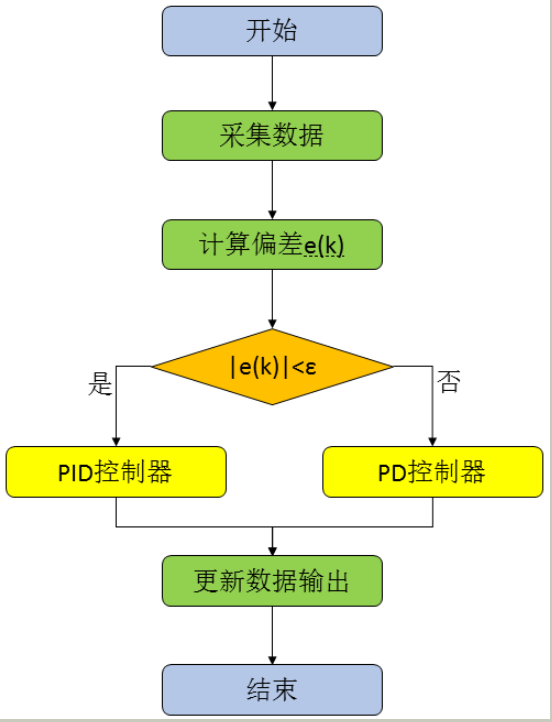
有上圖我們知道,與普通的PID算法的區別,只是判斷偏差的大小,偏差大時,為PD算法,偏差小時為PID算法。于是我們需要一個偏差檢測與積分項分離系數β的函數。
1 static uint16_t BetaGeneration(float error,float epsilon) 2 3 { 4 5 uint16_t beta=0; 6 7 if(abs(error)<= epsilon) 8 9 { 10 11 beta=1; 12 13 } 14 15 return beta; 16 17 }
(1)位置型PID算法實現
根據前面的分析我們可以很輕松的編寫程序,只需要在編寫程序時判斷偏差以確定是否引入積分項就可以了。同樣先定義PID對象的結構體:
1 /*定義結構體和公用體*/
2
3 typedef struct
4
5 {
6
7 float setpoint; //設定值
8
9 float proportiongain; //比例系數
10
11 float integralgain; //積分系數
12
13 float derivativegain; //微分系數
14
15 float lasterror; //前一拍偏差
16
17 float result; //輸出值
18
19 float integral;//積分值
20
21 float epsilon; //偏差檢測閾值
22
23 }PID;
接下來實現PID控制器:
1 void PIDRegulation(PID *vPID, float processValue)
2
3 {
4
5 float thisError;
6
7 thisError=vPID->setpoint-processValue;
8
9 vPID->integral+=thisError;
10
11 uint16_t beta= BetaGeneration(error, vPID->epsilon);
12
13 if(beta>0)
14
15 {
16
17 vPID->result=vPID->proportiongain*thisError+vPID->derivativegain*(thisError-vPID->lasterror);
18
19 }
20
21 else
22
23 {
24
25 vPID->result=vPID->proportiongain*thisError+vPID->integralgain*vPID->integral+vPID->derivativegain*(thisError-vPID->lasterror);
26
27 }
28
29
30
31 vPID->lasterror=thisError;
32
33 }
與普通的PID算法的區別就是上述代碼中增加了偏差判斷,來決定積分項的分離與否。
(2)增量型PID算法實現
對于增量型PID控制,我們也可以采取相同的處理。首先定義PID對象的結構體:
1 /*定義結構體和公用體*/
2
3 typedef struct
4
5 {
6
7 float setpoint; //設定值
8
9 float proportiongain; //比例系數
10
11 float integralgain; //積分系數
12
13 float derivativegain; //微分系數
14
15 float lasterror; //前一拍偏差
16
17 float preerror; //前兩拍偏差
18
19 float deadband; //死區
20
21 float result; //輸出值
22
23 float epsilon; //偏差檢測閾值
24
25 }PID;
接下來實現PID控制器:
1 void PIDRegulation(PID *vPID, float processValue)
2
3 {
4
5 float thisError;
6
7 float increment;
8
9 float pError,dError,iError;
10
11
12
13 thisError=vPID->setpoint-processValue; //得到偏差值
14
15 pError=thisError-vPID->lasterror;
16
17 iError=thisError;
18
19 dError=thisError-2*(vPID->lasterror)+vPID->preerror;
20
21 uint16_t beta= BetaGeneration(error, vPID->epsilon);
22
23 if(beta>0)
24
25 {
26
27 increment=vPID->proportiongain*pError+vPID->derivativegain*dError; //增量計算
28
29 }
30
31 else
32
33 {
34
35 increment=vPID->proportiongain*pError+vPID->integralgain*iError+vPID->derivativegain*dError; //增量計算
36
37 }
38
39 vPID->preerror=vPID->lasterror; //存放偏差用于下次運算
40
41 vPID->lasterror=thisError;
42
43 vPID->result+=increment;
44
45 }
這就實現了增量型PID控制器積分分離算法,也沒有考慮任何的干擾條件,僅僅只是對數學公式的計算機語言化。
3、總結
積分分離算法的思想非常簡單。當然,對于β的取值,很多人提出了改進措施,例如分多段取值,設定多個閾值ε1、ε2、ε3、ε4等,不過這些閾值也需要根據實際的系統來設定。除了分段取值外,甚至也有采用函數關系來獲取β值。當然,這樣處理后就不再是簡單的積分分離了,特別是在增量型算法中,實際上已經演變為一種變積分算法了。已經偏離了積分分離算法的設計思想,在后面我們會進一步說明。
編輯:hfy
-
算法
+關注
關注
23文章
4630瀏覽量
93351 -
PID控制器
+關注
關注
2文章
173瀏覽量
18671 -
PD控制器
+關注
關注
0文章
26瀏覽量
16469
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論