") 深度解析三種不同方式ADC應(yīng)用實例
深度解析三種不同方式ADC應(yīng)用實例
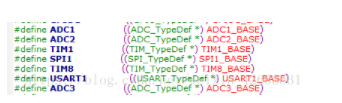
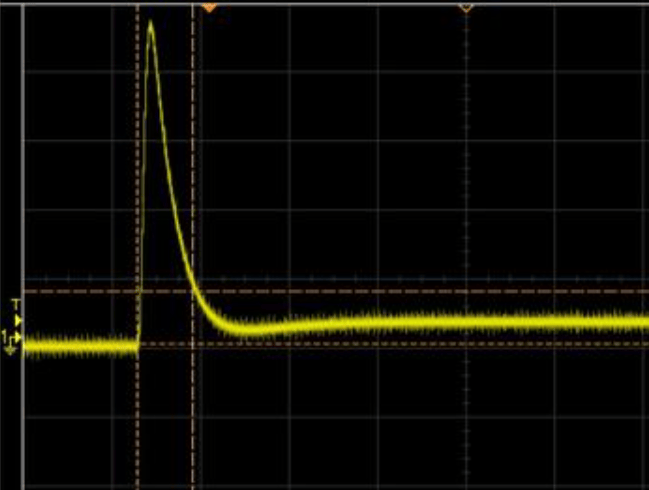
所用的芯片內(nèi)嵌3個12位的模擬/數(shù)字轉(zhuǎn)換器(ADC),每個ADC共用多達(dá)16個外部通道,2個內(nèi)部通道。
3個:代表ADC1、ADC2、ADC3(下圖是芯片固件庫的截圖)
12位:也叫ADC分辨率、采樣精度。先來看看二進(jìn)制的12位可表示0-4095個數(shù),也就是說轉(zhuǎn)換器通過采集轉(zhuǎn)換所得到的最大值是4095,如:“111111111111”=4095,那么我們怎么通過轉(zhuǎn)換器轉(zhuǎn)換出來的值得到實際的電壓值呢?如果我們要轉(zhuǎn)換的電壓范圍是0v-3.3v的話,轉(zhuǎn)換器就會把0v-3.3v平均分成4096份。設(shè)轉(zhuǎn)換器所得到的值為x,所求電壓值為y。
那么就有: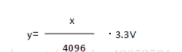
16個外部通道:簡單的說就是芯片上有16個引腳是可以接到模擬電壓上進(jìn)行電壓值檢測的。16個通道不是獨立的分配給3個轉(zhuǎn)換器(ADC1、ADC2、ADC3)使用,有些通道是被多個轉(zhuǎn)換器共用的。首先看看16個通道在固件庫的宏定義(寫代碼要看的):
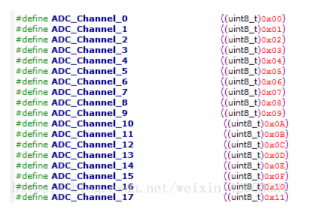
到這里大家可能會有疑問,每個通道到底對應(yīng)哪個引腳呢?下面先給出部分引腳圖:
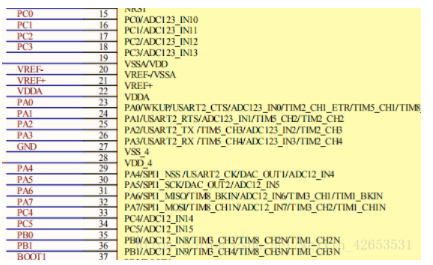
16個通道的引腳都在上面的圖中,拿其中的一個進(jìn)行說明:
ADC123_IN10:字母“ADC”不用多說,“123”代表它被3個(ADC1、ADC2、ADC3)轉(zhuǎn)換器共用的引腳,“10”對應(yīng)剛才那張宏定義圖里面的ADC_Channel_10,這樣就能找到每個通道對應(yīng)的引腳了。
2個內(nèi)部通道:一個是內(nèi)部溫度傳感器,一個是內(nèi)部參考電壓。
在某個項目中要用到芯片里面的AD轉(zhuǎn)換器,那么要怎么寫應(yīng)用代碼?(以下是代碼講解)
芯片固件的庫函數(shù)為我們提供了很多封裝好的函數(shù),只要運用它提供的函數(shù)接口就可以了,宏觀上來講就搞懂兩個事情就行了:
初始化(設(shè)置用的哪個引腳、單通道、還是多通道同時轉(zhuǎn)換、是否使用DMA等配置)?
怎么讓轉(zhuǎn)換器進(jìn)行一次數(shù)據(jù)獲取?
以下分別講述三種不同方式(單通道、多通道、基于DMA的多通道采集)的ADC應(yīng)用實例:
/*單通道的ADC采集*/
void Adc_Config(void)
{
/*定義兩個初始化要用的結(jié)構(gòu)體,下面給每個結(jié)構(gòu)體成員賦值*/
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*
使能GPIOA和ADC1通道時鐘
注意:除了RCC_APB2PeriphClockCmd還有RCC_APB1PeriphClockCmd,那么該如何選擇?
APB2:高速時鐘,最高72MHz,主要負(fù)責(zé)AD輸入,I/O,串口1,高級定時器TIM
APB1:低速時鐘,最高36MHz,主要負(fù)責(zé)DA輸出,串口2、3、4、5,普通定時器TIM,USB,IIC,CAN,SPI
*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1, ENABLE );
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //72M/6=12, ADC的采樣時鐘最快14MHz
/*配置輸入電壓所用的PA0引腳*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
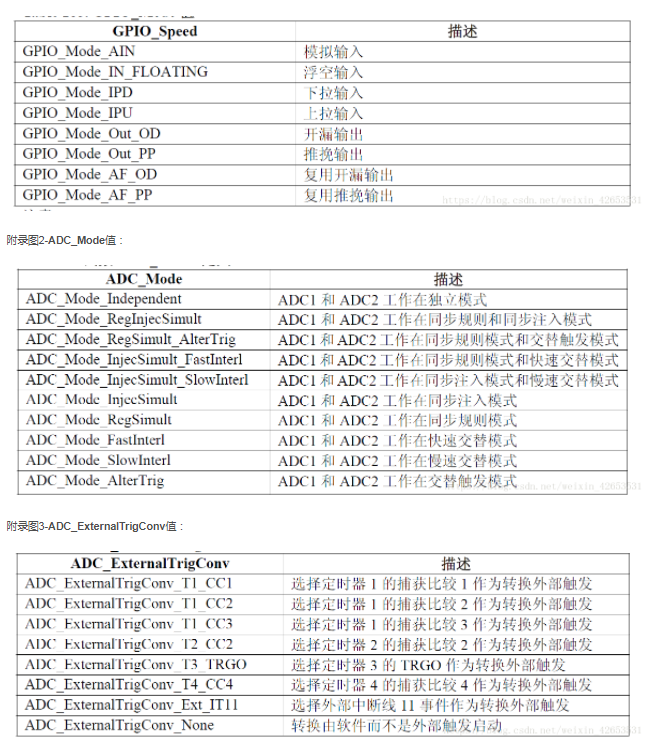
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //GPIO_Mode_AIN:模擬輸入(還有其他什么模式?請看下面的附錄圖1)
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_DeInit(ADC1); //復(fù)位,將ADC1相關(guān)的寄存器設(shè)為默認(rèn)值
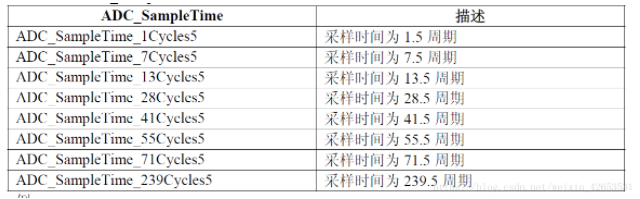
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //工作模式:ADC1和ADC2獨立工作模式 (還有其他什么模式?請看下面的附錄圖2)
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //數(shù)模轉(zhuǎn)換工作:掃描(多通道)模式=ENABLE、單次(單通道)模式=DISABLE
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//數(shù)模轉(zhuǎn)換工作:連續(xù)=ENABLE、單次=DISABLE
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //ADC轉(zhuǎn)換由軟件觸發(fā)啟動 (還有其他什么模式?請看下面的附錄圖3)
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC數(shù)據(jù)右對齊 除了右就是左:ADC_DataAlign_Left
ADC_InitStructure.ADC_NbrOfChannel = 1; //順序進(jìn)行規(guī)則轉(zhuǎn)換的ADC通道的數(shù)目 范圍是1-16
ADC_Init(ADC1, &ADC_InitStructure); //根據(jù)ADC_InitStruct中指定的參數(shù)初始化外設(shè)ADC1的寄存器
/*為啥要設(shè)置下面這一步?
細(xì)心的你可以發(fā)現(xiàn)上面初始化了一個引腳通道,初始化了一個ADC轉(zhuǎn)換器,但ADC轉(zhuǎn)換器并不知道你用的是哪個引腳吧?
這一步目的是:設(shè)置指定ADC的規(guī)則組通道(引腳),設(shè)置它們的轉(zhuǎn)化順序和采樣時間
函數(shù)原型:void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, u8 ADC_Channel, u8 Rank, u8 ADC_SampleTime)
參數(shù)1 ADCx:x可以是1或者2來選擇ADC外設(shè)ADC1或ADC2
參數(shù)2 ADC_Channel:被設(shè)置的ADC通道 范圍ADC_Channel_0~ADC_Channel_17
參數(shù)3 Rank:規(guī)則組采樣順序。取值范圍1到16。
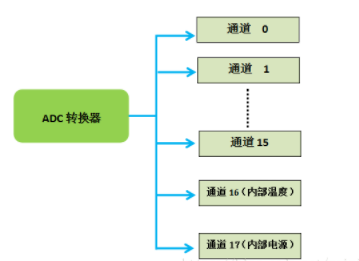
ADC_SampleTime:指定ADC通道的采樣時間值 (取值范圍?請看下面的附錄圖4)
*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5 );
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC 注意:函數(shù)ADC_Cmd只能在其他ADC設(shè)置函數(shù)之后被調(diào)用
/*下面4步按流程走,走完就行*/
ADC_ResetCalibration(ADC1); //重置指定的ADC的校準(zhǔn)寄存器
while(ADC_GetResetCalibrationStatus(ADC1)); //等待上一步操作完成
ADC_StartCalibration(ADC1); //開始指定ADC的校準(zhǔn)狀態(tài)
while(ADC_GetCalibrationStatus(ADC1));//等待上一步操作按成
}
初始化完成之后,在主函數(shù)中:
void main(void)
{
float ADC_ConvertedValue;
float ADC_ConvertedValueLocal;
Adc_Config();
while(1)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //啟動轉(zhuǎn)換
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC )); //等待轉(zhuǎn)換完成
ADC_ConvertedValue=ADC_GetConversionValue(ADC1); //獲取轉(zhuǎn)換結(jié)果*ADC_ConvertedValue*
ADC_ConvertedValueLocal=(float)ADC_ConvertedValue*(3.3/4096); //計算出實際電壓值*ADC_ConvertedValueLocal*
//這里適當(dāng)加上一些延遲
//最好連續(xù)轉(zhuǎn)換幾次 取平均值 這里就省略寫了 點到為止}}
附錄圖1-GPIO_Mode值:
附錄圖4-ADC_SampleTime值:
對于一些剛接觸stm32的人來說,看了上面的代碼可能還會有很多疑問。
為什么要使能時鐘?時鐘到底設(shè)置多少才合適?
對于ADC_GetConversionValue(ADC1)這個函數(shù)參數(shù)并沒有指定那個通道,如果多個通道同時使用CAN1轉(zhuǎn)換器轉(zhuǎn)換時怎么獲取每個通道的值?
第一個問題,所有的外設(shè)都要使能時鐘,時鐘源分為外部時鐘和內(nèi)部時鐘,外部時鐘比如接8MHz晶振,內(nèi)部時鐘就在芯片內(nèi)部集成,時鐘源為所有的時序電路提供基本的脈沖信號。時鐘源好比是一顆跳動的心臟,它按照一定的頻率在跳動,所有的器官(外設(shè))要跟心臟(時鐘源)橋接起來才能工作,但不同的外設(shè)需要的頻率不同,所以在時鐘源跟外設(shè)之中常常還會有一些分頻器或者倍頻器,以實現(xiàn)對頻率的衰減或增強。還想了解更多專業(yè)的解釋可以去研究stm32的時鐘樹圖。
**第二個問題,**回答這個問題那么就等于開始介紹多通道轉(zhuǎn)換怎么實現(xiàn)了,看下圖
由圖理解,一個ADC轉(zhuǎn)換器只能選擇轉(zhuǎn)換一個通道,那么對比單通道我們只需做一下改變(以雙通道為例):
1.在void Adc_Config(void)函數(shù)里面添加:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
配置多一個IO(PA1)口, 也就是通道1。
2.在void Adc_Config(void)函數(shù)里面添加:
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5 );
先不指定ADC轉(zhuǎn)換通道。
3.在主函數(shù)循環(huán)里改為:
while(1)
{
/*先采集通道1數(shù)據(jù)*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5 );
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));
ADC_ConvertedValue=ADC_GetConversionValue(ADC1);
ADC_ConvertedValueLocal=(float)ADC_ConvertedValue*(3.3/4096);
/*再采集通道2數(shù)據(jù)*/
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_239Cycles5 );
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));
ADC_ConvertedValue=ADC_GetConversionValue(ADC1);
ADC_ConvertedValueLocal=(float)ADC_ConvertedValue*(3.3/4096);
//加入適當(dāng)延時
}
完成以上三步就能把單通道擴(kuò)展到雙通道(或者更多個通道)。不過還有一種基于DMA的多通道轉(zhuǎn)換更加合適。
首先簡單介紹DMA,DMA(Direct Memory Access,直接內(nèi)存存取) ,用來提供在外設(shè)和存儲器之間或者存儲器和存儲器之間的高速數(shù)據(jù)傳輸。無需CPU干預(yù),節(jié)省CPU資源;ADC轉(zhuǎn)換出來的值直接賦值給定義好的變量中。配置好的DMA可以不停地將ADC轉(zhuǎn)換值寫到該變量中,在主函數(shù)直接判斷該變量就知道此時的AD值,也就是說在主函數(shù)中不需要調(diào)用ADC_GetConversionValue()函數(shù)來獲取轉(zhuǎn)換值。
DMA跟其他外設(shè)一樣需要進(jìn)行配置通道,使能時鐘等參數(shù)。
下面直接看代碼分析:
/*基于DMA的ADC多通道采集*/
volatile uint16 ADCConvertedValue[10][3];//用來存放ADC轉(zhuǎn)換結(jié)果,也是DMA的目標(biāo)地址,3通道,每通道采集10次后面取平均數(shù)
void DMA_Init(void)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);//使能時鐘
DMA_DeInit(DMA1_Channel1); //將通道一寄存器設(shè)為默認(rèn)值
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&(ADC1->DR);//該參數(shù)用以定義DMA外設(shè)基地址
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&ADCConvertedValue;//該參數(shù)用以定義DMA內(nèi)存基地址(轉(zhuǎn)換結(jié)果保存的地址)
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;//該參數(shù)規(guī)定了外設(shè)是作為數(shù)據(jù)傳輸?shù)哪康牡剡€是來源,此處是作為來源
DMA_InitStructure.DMA_BufferSize = 3*10;//定義指定DMA通道的DMA緩存的大小,單位為數(shù)據(jù)單位。這里也就是ADCConvertedValue的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//設(shè)定外設(shè)地址寄存器遞增與否,此處設(shè)為不變 Disable
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//用來設(shè)定內(nèi)存地址寄存器遞增與否,此處設(shè)為遞增,Enable
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;//數(shù)據(jù)寬度為16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;//數(shù)據(jù)寬度為16位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //工作在循環(huán)緩存模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High;//DMA通道擁有高優(yōu)先級 分別4個等級 低、中、高、非常高
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;//使能DMA通道的內(nèi)存到內(nèi)存?zhèn)鬏?/p>
DMA_Init(DMA1_Channel1, &DMA_InitStructure);//根據(jù)DMA_InitStruct中指定的參數(shù)初始化DMA的通道
DMA_Cmd(DMA1_Channel1, ENABLE);//啟動DMA通道一
}
下面是ADC的初始化,可以將它與上面的對比一下有啥不同,重復(fù)的就不解析了
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*3個IO口的配置(PA0、PA1、PA2)*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*IO和ADC使能時鐘*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1|RCC_APB2Periph_GPIOA,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //連續(xù)轉(zhuǎn)換
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 3;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime_239Cycles5);//通道一轉(zhuǎn)換結(jié)果保存到ADCConvertedValue[0~10][0]
ADC_RegularChannelConfig(ADC1,ADC_Channel_1,2,ADC_SampleTime_239Cycles5););//通道二轉(zhuǎn)換結(jié)果保存到ADCConvertedValue[0~10][1]
ADC_RegularChannelConfig(ADC1,ADC_Channel_2,3,ADC_SampleTime_239Cycles5); );//通道三轉(zhuǎn)換結(jié)果保存到ADCConvertedValue[0~10][2]
ADC_DMACmd(ADC1, ENABLE);//開啟ADC的DMA支持
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
做完這兩步,ADCConvertedValue數(shù)組的值就會隨輸入的模擬電壓改變而改變,在主函數(shù)中最好取多幾次的平均值,再通過公式換算成電壓單位。下面是主函數(shù):
int main(void)
{
int sum;
u8 i,j;
float ADC_Value[3];//用來保存經(jīng)過轉(zhuǎn)換得到的電壓值
ADC_Init();
DMA_Init();
ADC_SoftwareStartConvCmd(ADC1, ENABLE);//開始采集
while(1)
{
for(i=0;i<3;i<++)
{
sum=0;
for(j=0;j<10;j++)
{
sum+=ADCConvertedValue[j][i];
}
ADC_Value[i]=(float)sum/(10*4096)*3.3;//求平均值并轉(zhuǎn)換成電壓值
//打印(略)
}
//延時(略)
}}
ADCConvertedValue的定義用了volatile修飾詞,因為這樣可以保證每次的讀取都是從絕對地址讀出來的值,不會因為被會編譯器進(jìn)行優(yōu)化導(dǎo)致讀取到的值不是實時的AD值。
最后提醒一下,接線測試的時候記得接上基準(zhǔn)電壓,就是VREF+和VREF-這兩個引腳。如果不想外接線測試就將內(nèi)部通道的電壓讀出來,這樣就不用配置IO口了。
水平有限,僅供參考,錯誤之處以及不足之處還望多多指教。
編輯:hfy
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8745瀏覽量
148063 -
數(shù)字轉(zhuǎn)換器
+關(guān)注
關(guān)注
0文章
236瀏覽量
27623 -
AD轉(zhuǎn)換器
+關(guān)注
關(guān)注
4文章
250瀏覽量
41527
發(fā)布評論請先 登錄
相關(guān)推薦
示波器的三種觸發(fā)模式
systemd journal收集日志的三種方式

I2S有左對齊,右對齊跟標(biāo)準(zhǔn)的I2S三種格式,那么這三種格式各有什么優(yōu)點呢?
Windows管理內(nèi)存的三種主要方式
隔離開關(guān)的三種連鎖方式介紹
單片機(jī)的三種總線結(jié)構(gòu)
shell腳本執(zhí)行的三種方式及區(qū)別
簡述三種esp32的開發(fā)方式是什么
常用的pwm跟蹤控制方式是哪三種
計算機(jī)網(wǎng)絡(luò)中的三種通信方式
逆變電路的三種調(diào)壓方式
交流電力控制電路三種控制方式
簡述斬波電路的三種控制方式及其特點
簡述斬波電路的三種控制方式
開關(guān)穩(wěn)壓器的三種控制方式解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論