 無人機設計ESC以及市場開發解決方案
無人機設計ESC以及市場開發解決方案
無人機設計的關鍵是能夠控制電動機的速度和旋轉。大多數無人機由無刷直流電動機提供動力,這需要不斷調節速度和旋轉方向。電子速度控制(ESC)模塊執行這些功能,并包括電源級,電流感測電路,微控制器以及與飛行控制系統的通信接口,因此使其成為無人機的基礎。本文介紹了在設計ESC以及市場開發解決方案時要考慮的重要因素。
ESC的設計需要對特性進行仔細的評估和分析,總結如下:
無人機上可以安裝兩種類型的無刷電動機:無刷直流電動機(BLDC)和無刷交流電動機(BLAC),也稱為永磁同步電動機(PMSM)。使用哪種類型的電動機的選擇受所選控制算法的影響,該算法可以是梯形控制或磁場定向控制(FOC)。梯形電動機控制算法具有以下主要特征:
- 基于六相開關序列的電機控制
- 檢測轉子的磁角,用于設置正確的角度;每一步對應一個60°角
- 在無傳感器控制系統中,通過測量反電動勢相電壓來估算開關角度
- 另一方面,FOC控制算法具有以下功能:
- 通過正弦相電壓或電流(FOC)進行電機控制
- 轉子角度檢測的最小精度為1°至5°,這確保算法始終能夠提供最大扭矩
在無傳感器控制系統中,電動機的磁角是根據電動機的相電壓和電流來估算的。它的位置是通過監視電動機的某些電氣參數來確定的,而無需使用其他傳感器。無人機中最常用的類型是無刷直流電動機,這是由于其體積小,成本相對較低以及耐用性和魯棒性高。
大多數無人機至少有四個電機,其中最常用的是四電機版本。ESC負責控制每個電動機的速度,因此,最常見的無人機架構涉及為每個電動機專用的ESC。所有ESC都必須能夠通過飛行控制器直接或間接地相互通信,以便易于控制無人機。每個電動機旋轉的方向也很重要:在四軸飛行器中,一對電動機沿一個方向旋轉,而另一對電動機則沿相反方向旋轉。
ESC制造商最常用的電動機控制技術是磁場定向控制,即一種控制電動機轉矩和速度的技術。如果正確實施,FOC甚至可以處理快速的加速度變化而不會產生不穩定性,從而使無人機能夠執行復雜的機動,同時最大程度地提高效率。
下面的圖1中的框圖顯示了一個FOC架構,其中包括以下組件:
- 電流控制器由兩個積分比例控制器組成
- 可選的外部環路速度控制器和參考電流發生器
- Clarke,Park和Inverse Park變換可用于從固定幀到旋轉同步幀的轉換
- 一種空間矢量調制器算法,可將vα和vβ命令轉換為應用于定子繞組的脈寬調制信號
- 保護和輔助功能,包括啟動和關閉邏輯
如果需要無傳感器控制,則可選觀察者來估計轉子的角位置
圖1:面向字段的控制框圖(來源:Mathworks)
設計FOC的電機控制工程師要執行多項任務,包括使用兩個用于電流回路的PI控制器開發控制器架構,優化所有PI控制器的增益以滿足性能要求,以及設計空間矢量調制器來控制PWM。
一旦選擇了控制算法(梯形或FOC),下一步就是在開環或閉環控制系統之間進行選擇。在開環控制中,同步電動機(BLDC或BLAC)通過控制信號驅動,并假定遵循命令的控制動作。在閉環控制系統中,電路能夠檢查電動機是否按預期運行。如果不是,則控制系統會通過減小或增大電流來自動補償過度運動或運動不足。
使用閉環或開環(無傳感器)控制系統時,必須測量電流和電壓以用作反饋信號。圖2顯示了適用于梯形和正弦控制系統的典型測量設置。通過將梯形控制與無傳感器算法結合使用,無傳感器算法將使用三相電壓來計算轉子角。
圖2:具有無傳感器電機控制的ESC。右邊是德州儀器(TI)的無人機ESC的高速無傳感器FOC參考設計,而左邊是其框圖。(來源:德州儀器)
四旋翼動力
無人機的機械簡單性和空氣動力學穩定性與電動機及其操縱的協調使用有關。在四軸飛行器中,位于結構對角線上的一對電動機沿與其他兩個電動機相同的方向但相反的方向旋轉。如果所有四個電機都以相同的速度旋轉,則無人機可以爬升,下降或保持水平飛行。如果對角線的旋轉速度快于另一對角線,則無人駕駛飛機將繞其重心旋轉并保持在同一水平面內(圖3)。
圖3:無人機使用轉子速度的不同組合來執行機動。(來源:意法半導體)
如果您更改頭(或尾)旋翼的速度,則無人機將像固定翼飛機向下俯沖那樣指向上方或下方。左右扭矩調整將導致無人機滾動,使其繞其軸旋轉。由無人機的飛行控制系統來改變合適的旋翼的速度,以達到完成所需機動所需的飛行高度。
對于控制工程師而言,速度校正是一個常見的控制回路反饋問題,可通過比例積分微分(PID)控制器解決。
設計電調
為無人機設計ESC時,需要專門設計用于控制高RPM電機(12,000+ RPM)的高質量組件。德州儀器(TI)開發了一個名為InstaSPIN的MCU系列,可簡化三相電機控制應用程序的設計。適用于無傳感器系統的InstaSPIN-FOC具有快速軟件編碼器,該軟件編碼器具有適用于任何三相電動機的轉矩和速度控制。InstaSPIN-MOTION適用于無傳感器系統,可為任何三相電動機提供位置,速度和轉矩控制。
TI提供了這些示波器的完整參考設計,其中包括InstaSPIN-FOC和InstaSPIN-MOTION電機控制技術。該平臺包括一個32位TI C2000 InstaSPIN微控制器。它使開發人員能夠識別,自動調節和控制三相電動機,從而快速提供穩定且功能強大的電動機控制系統。
STMicroelectronics提供了完整的ESC參考設計,實現了無傳感器FOC算法。STEVAL-ESC001V1 ESC參考設計適用于入門級商用無人機設計,并驅動由6S LiPo電池組或任何等效的直流電源供電的任何三相無刷電動機(或PMSM),峰值電流最高為30A。STEVAL-ESC001V1借助完整的預配置固件包(STSW-ESC001V1),使設計人員能夠快速開發其應用,并實現了無傳感器的磁場定向控制算法,該算法具有三路電流讀數,速度控制和完全主動制動功能。STSW-ESC001V1固件/軟件包以及STM32 PMSM FOC軟件開發套件MC庫允許通過作用于STM32 MCU中嵌入的FOC參數來優化ESC設計,并利用ST電機分析器快速檢索相關的電機參數。意法半導體的無傳感器FOC算法可適用于任何三相BLDC或PMSM電機應用,提供更長的飛行時間和最佳的動態性能(圖4和5)。
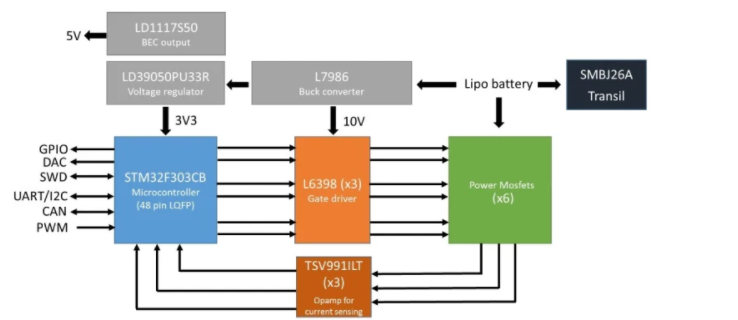
圖4:意法半導體的STEVAL-ESC001V1解決方案的框圖(來源:意法半導體)
圖5:意法半導體的STEVAL-ESC001V1板(來源:意法半導體)
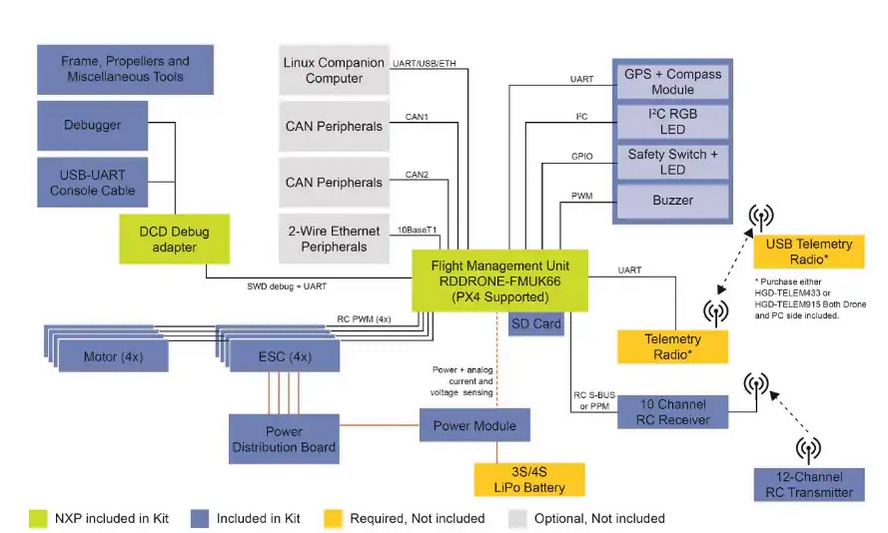
該HoverGames無人機開發平臺,可用于構建任何自主車型,從無人機和流浪者無人機模塊化和靈活的恩智浦的硬件/軟件解決方案。該開發套件主要基于具有Linux和Open CV的微處理器以及各種用于指導飛行的傳感器。
飛行控制器確保無人機保持穩定。該開發板是開源的,可以插入其他外部傳感器以根據功能優化操作。
必須使用IoT連接之一來實現LiPo電池和特定國家/地區的遙測無線電。要獲得套件的全部功能,您將需要選擇要購買的兩個遙測無線電中的哪一個。通過遙測,您可以在飛行過程中與車輛進行實時連接,并可以在飛行過程中查看無人機的狀態,進行裝載,控制自主航路點并進行必要的更改。遙測數據被發送到控制站,但也被存儲在飛行單元的機上。
套件組件還包括DC-DC電源模塊,帶底座的GPS NEO-M8N模塊,安全開關,蜂鳴器,明亮的RGB狀態LED,SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3電纜/帶電纜的調試分線板,BLDC無刷電動機2212 920 kV和ESC電動機控制器40 A OPTO(圖6)。
-
電磁兼容性
+關注
關注
6文章
427瀏覽量
33764 -
ESC
+關注
關注
0文章
61瀏覽量
17603 -
無人機
+關注
關注
230文章
10515瀏覽量
182434 -
PI控制器
+關注
關注
1文章
25瀏覽量
11450
發布評論請先 登錄
相關推薦
定制化生產:反制無人機設備的新篇章
車載反無人機設備雷達系統:高效靈活的反無人機解決方案
無人機巡檢系統光伏巡檢方案與作用
無人機防御市場的巨頭角逐與未來趨勢展望
中外反無人機市場分析及趨勢展望
無人機遭遇“神秘殺手”:揭秘反無人機技術的崛起

NXP Semiconductors HoverGames無人機系統解決方案





 工商網監
工商網監
評論