 雷達測距相關知識點詳解
雷達測距相關知識點詳解
雷達系統的基本功能是可以探測目標并測量相關參數,包括目標的距離、速度和角度等。下圖顯示了雷達系統的基本處理過程,包括發射機、天線、接收機、顯示器等部分。
雷達系統的處理過程
雷達發射機產生信號,放大后通過天線以電磁波的形式輻射出去,遇到物體反射的回波被天線接收,雷達想要探測的物體稱為“目標”,而將其他物體的回波稱為“雜波”。
天線接收到的信號經過放大并進行信號處理,獲得目標信息后由屏幕顯示出目標的距離、速度和方向等多維度的信息。
距離探測
由于電磁波的速度恒定為c=3*10^8m/s,那么若能測量出接收目標回波時刻相對于發射時刻的時間差t,那么就可以通過R=ct/2來計算目標距離。
脈沖寬度與最小探測距離
對于單站脈沖體制的雷達,由于在發射信號時并不接收目標回波,因此存在一定測距的盲區,也就是雷達有最小探測距離。
距離盲區與發射的脈沖寬度相關,對于脈沖寬度1us對應150m的距離盲區,對于稍大脈寬的信號將有太大的距離盲區,例如100us的脈寬就有15km距離盲區。當然,采用收發分置或者連續波雷達將會解決距離盲區的問題,但會帶來例如隔離等其他問題。
PRF與最大不模糊距離
脈沖重復頻率(PRF)是脈沖重復間隔(PRT)的倒數,PRT=1/PRF。它將直接影響最大不模糊距離,也就是目標的回波在當前PRF即可返回。如果目標的雷達回波信號在下一個或下幾個脈沖回波中才回來,那么就存在距離模糊。
我們可以通過參差PRF來解決,根據回波在不同PRF脈沖中位置的不穩定性來解模糊。點此查看: 解距離模糊的方法
當然,對于相控陣雷達,通過靈活的波束指向控制以不接收先前脈沖的回波也可以解決距離模糊的問題。
占空比
如上圖,占空比是脈沖寬度與脈沖重復間隔(周期)的比值,等于脈沖發射的平均功率與脈沖峰值功率的比值。
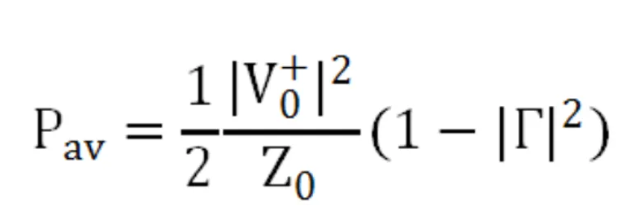
從雷達方程可以看出雷達最大的探測距離是與發射機的輸出功率直接相關的,最大發射功率通常是受限的,但是可以通過提高占空比來增加平均功率,從而增加探測距離。從上圖中列出的關系,我們發現可以增加脈寬和減少脈沖重復間隔時間來提高占空比。
脈沖串及其頻譜
從上圖可以看出脈沖串的脈寬和周期及其頻譜特性的關系。
距離分辨力
實際的距離分辨力很復雜,為了全面考慮距離自相關函數主峰、旁瓣對分辨能力的影響,Woodward定義了一個反映分辨特性的參數:時延分辨常數,它與信號的有效帶寬成反比。
時延分辨常數是將相應主峰、旁瓣或類似噪聲基地的全部能量計算在一起,除以主峰最高點功率所得的時間寬度。時延分辨常數越小,距離自相關函數的主峰窄、旁瓣或基底小,對分辨目標是有利的。
測距精度
首先要知道測距精度和距離分辨力是不同的概念。我們知道通過測量雷達回波的時延來測量目標的距離,但是系統對于時延的測量會有誤差,這個誤差的大小就是精度問題。
距離分辨率是雷達能區分二個目標的最小距離,二個目標相距小于它,雷達就認為是一個目標了。而測距精度則表示對某一個目標距離測量的精確性問題,它與信噪比和信號均方根帶寬有關。
脈沖壓縮技術
脈沖壓縮技術是匹配濾波理論和相關接收理論的一個很好的實際應用。它的提出很好的解決了這樣的一個問題:
在發射端發射大時寬、帶寬信號,以提高信號的速度測量精度和速度分辨力;而在接收端,將寬脈沖信號壓縮為窄脈沖,以提高雷達對目標的距離分辨精度和距離分辨力;
脈沖壓縮雷達發射寬脈沖信號,接收和處理回波后輸出窄脈沖的雷達,優點是能獲得大的作用距離和很高的距離分辨力。
責任編輯:haq
-
天線
+關注
關注
68文章
3213瀏覽量
141149 -
雷達
+關注
關注
50文章
2969瀏覽量
118024
發布評論請先 登錄
相關推薦
Docker-鏡像的分層-busybox鏡像制作

Aigtek功率放大器應用:電感線圈的知識點分享

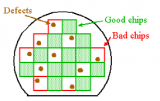
芯片良率相關知識點詳解
后悔沒有早點看到:天線設計中的知識點!
巍泰技術WTR-565:彎道與路口預警雷達新升級,測距測速雙效合一

毫米波雷達如何提高測距精度
相控陣雷達電源芯片詳解
接口測試理論、疑問收錄與擴展相關知識點

激光雷達點云數據包含哪些信息
定華雷達知識講堂:導波雷達物位計技術的應用


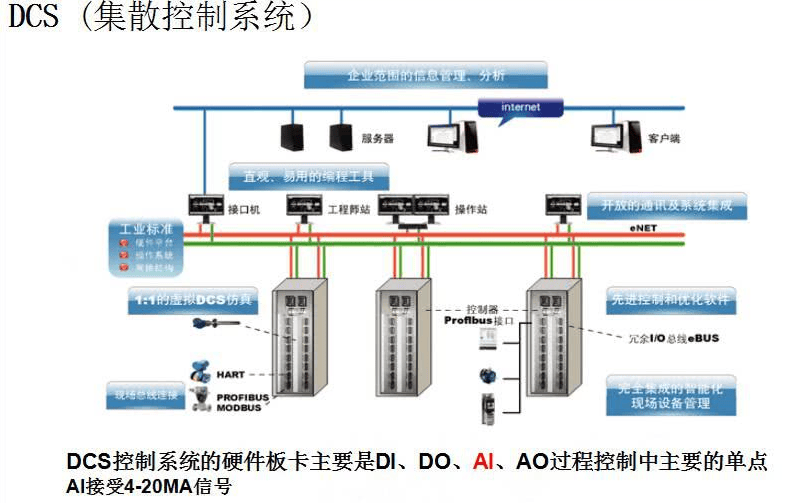
一篇搞定DCS系統相關知識點





 工商網監
工商網監
評論