") 低成本又堅(jiān)固的四軸飛行器怎么做
低成本又堅(jiān)固的四軸飛行器怎么做
這是我為應(yīng)對(duì)CrashCast挑戰(zhàn)而設(shè)計(jì)和制造的四軸飛行器,以盡可能便宜和堅(jiān)固地建造可飛行的四軸飛行器。從構(gòu)造的角度來看,四軸飛行器很有趣,因?yàn)椋ㄅc直升機(jī)不同)它們沒有活動(dòng)部件,并且(與飛機(jī)不同)不依賴于空氣動(dòng)力體來飛行。結(jié)果,我們看到了由多種材料和建造技術(shù)制成的多軸直升機(jī)。
數(shù)量x組件名稱
3× 泡棉棒
4× 電機(jī),Powerdrive 2830,900 kvm
4× 道具,SPC 10x4.7
4× 電調(diào)30A
1× 飛行控制板(例如MultiWii或ArduPilot Mega)
2× 碳纖維棒
1× 泡沫TAC膠
1× LED燈條
1× 捆扎帶
為了保持四軸飛行器的精神,我希望結(jié)構(gòu)盡可能簡(jiǎn)單(例如,將電機(jī)綁在飛行器的手臂上)。我在一個(gè)晚上將手邊的材料整理在一起。最初是在最小的設(shè)計(jì)和建造中進(jìn)行實(shí)驗(yàn),但我對(duì)結(jié)果感到滿意,我定期進(jìn)行飛行并在有人要嘗試飛行時(shí)將其用作教練機(jī)。
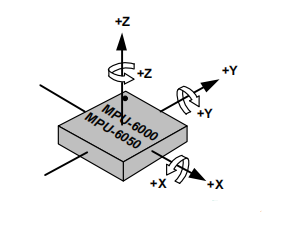
四軸飛行器是一個(gè)在空間具有6個(gè)活動(dòng)自由度(分別沿3個(gè)坐標(biāo)軸作平移和旋轉(zhuǎn)動(dòng)作),但是只有4個(gè)控制自由度(四個(gè)電機(jī)的轉(zhuǎn)速)的系統(tǒng),因此被稱為欠驅(qū)動(dòng)系統(tǒng)(只有當(dāng)控制自由度等于活動(dòng)自由度的時(shí)候才是完整驅(qū)動(dòng)系統(tǒng))。不過對(duì)于姿態(tài)控制本身(分別沿3個(gè)坐標(biāo)軸作旋轉(zhuǎn)動(dòng)作),它確實(shí)是完整驅(qū)動(dòng)的。
這是四軸飛行器在夜間飛行:
責(zé)任編輯:xj
原文標(biāo)題:低成本的四軸飛行器怎么做,看這里!
文章出處:【微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9081瀏覽量
146371 -
四軸飛行器
+關(guān)注
關(guān)注
55文章
206瀏覽量
51228
原文標(biāo)題:低成本的四軸飛行器怎么做,看這里!
文章出處:【微信號(hào):cirmall,微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
租用站群服務(wù)器時(shí)如何降低成本?
MATLAB在低空飛行器中的應(yīng)用

企業(yè)AI模型托管怎么做的
云服務(wù)器怎么做負(fù)載均衡?
欣旺達(dá):已具備低空飛行器電池研發(fā)生產(chǎn)能力
嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧

變壓器CE認(rèn)證怎么做

中科宇航研發(fā)太空旅行飛行器,預(yù)計(jì)2028年開展太空邊緣載人旅游
基于S3C2440和專用DSP的嵌入式四軸運(yùn)動(dòng)控制器
上海峰飛航空領(lǐng)先全球低空飛行器領(lǐng)域,展望2040年
基于非線性自適應(yīng)學(xué)習(xí)控制器的四軸飛行器避障方案
傳感器融合的工作原理
什么是姿態(tài)傳感器MPU6050





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論