") 采用LM393設(shè)計的太陽能發(fā)電循跡小車
采用LM393設(shè)計的太陽能發(fā)電循跡小車
循跡小車是這種能夠順著預(yù)置的運動軌跡線路行車的小車,在很多實驗教學(xué)場所均有運用。而在循跡小車行車的全過程中,怎么讓小轎車可以精確地順著運動軌跡路線行車而不出現(xiàn)很大的誤差,是運用循跡小車的本質(zhì)。但,目前的循跡小車,因為其通常選用的是紅外線反射面方法意見反饋小轎車的行車運動軌跡,控制回路構(gòu)造比較繁雜,而且紅外線反射面易受危害,因此不但成本費較高,并且小車行車運動軌跡非常容易出現(xiàn)誤差,與設(shè)計方案的運動軌跡不符合。因而,本設(shè)計方案進行改善。
現(xiàn)有的循跡小車一般采用的是紅外反射方式反饋小車的行駛軌跡,控制電路結(jié)構(gòu)較為復(fù)雜,且成本較高,在小車行駛軌跡一定程度上容易出現(xiàn)偏差。因此采用LM393電壓比較器設(shè)計的能在特定跑道上循跡行駛的輪式智能小車,該循跡小車主要包括太陽能供電部分和循跡控制部分。控制電路部分主要包括蓄電池、開關(guān)、第一和第二光敏感應(yīng)電路、直流電機、比較電路和電機驅(qū)動電路。試驗樣機測試表明,以LM393電壓比較器為核心控制的循跡小車具有控制精度高、起停快等特點,解決了循跡小車的控制電路結(jié)構(gòu)復(fù)雜、行駛軌跡偏差較大的問題。下面介紹其的設(shè)計流程:
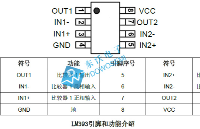
1.LM393比較器簡介
LM393 IC可以被視為等同比較最流行的版本LM358運算放大器。雖然任何運算放大器都可以用作電壓比較器,但LM393通過提供開路集電極輸出來證明其優(yōu)勢,使其適合驅(qū)動負載。輸出晶體管可以驅(qū)動高達50V和50mA的負載,適合驅(qū)動大多數(shù)TTL,MOS和RTL負載。晶體管還可以使負載與系統(tǒng)地隔離。其的特性和規(guī)格如下:
(1)單個封裝中的雙比較器
(2)寬電源范圍
單電源 - 2V至36V
雙電源 - ±1V至±18V
(3)漏極電流僅為0.4mA
(4)輸入失調(diào)電壓最大為±5mV
(5)功耗:660mW
(6)可以驅(qū)動大多數(shù)TTL和MOS負載
(7)輸出可以與系統(tǒng)地隔離
(8)低偏移電壓和電流
2.小車循跡原理
采用LM393電壓比較器作為循跡小車的主控芯片。利用光敏電阻在光線強弱條件下的阻值變化和LM393電壓比較器對小車的左右驅(qū)動輪的控制來實現(xiàn)小車的循跡驅(qū)動,配合顯示電路來了解小車的狀態(tài)。基于LM393電壓比較器的太陽能循跡小車的原理框圖如圖2所示。
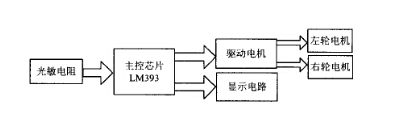
圖2 太陽能循跡小車的原理框圖
基于LM393電壓比較器控制的太陽能循跡小車的電路設(shè)計主要包括太陽能供電部分和小車循跡部分設(shè)計。該循跡小車主要部件包括電池盒,通過雙面膠粘貼在該電池盒底部的控制電路板,以及安裝在該控制電路板兩側(cè)的車輪組件和安裝在電池盒上方的太陽能電池板。
3.1太陽能供電部分設(shè)計
太陽能循跡小車采用蓄電池供電、儲電。太陽能電池板為蓄電池提供電源,即先對小車內(nèi)部蓄電池進行充電,等蓄電池有足夠電能輸出需要電壓時,才能在蓄電池輸出端輸出需要的電壓,以驅(qū)動循跡小車。
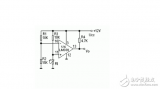
充電部分采用上海霖葉電子有限公司生產(chǎn)的單節(jié)鋰電池充電管理芯片TP4057。輸入電壓為4~9 V,典型值為5 V,可改變TP4057的6腳電阻來控制充電電流,調(diào)節(jié)范圍為100 ~ 500 mA,截止充電電壓為4.2 V。具體原理圖如圖3所示。
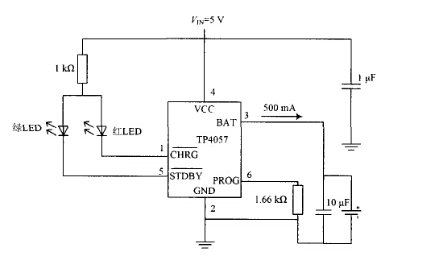
圖3 充電電路原理圖
該充電電路具有外圍簡單,無須外接開關(guān)管,具有充電指示和充滿指示、防電池反接正負極反接保護和電源欠壓保護等功能。該電路除了可以采用太陽能電池板供電外,還可以采用USB電源和適配器電源工作。TP4057的SOT封裝與較少的外部元件數(shù)目使得其適合在本循跡小車中應(yīng)用。
3.2小車循跡部分設(shè)計
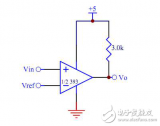
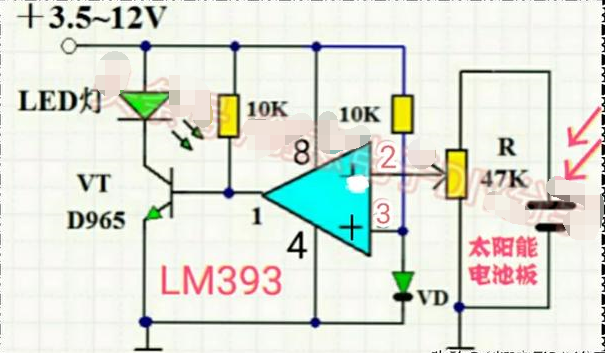
小車循跡部分采用LM393電壓比較器作為整個循跡電路的控制中心。LM393是雙路電壓比較器集成電路,由兩個獨立的精密電壓比較器構(gòu)成,它的作用是比較兩個輸入電壓,根據(jù)兩路輸入電壓的高低改變輸出電壓的高低。采用LM393電壓比較器作為循跡控制電路的原理圖如圖4所示。
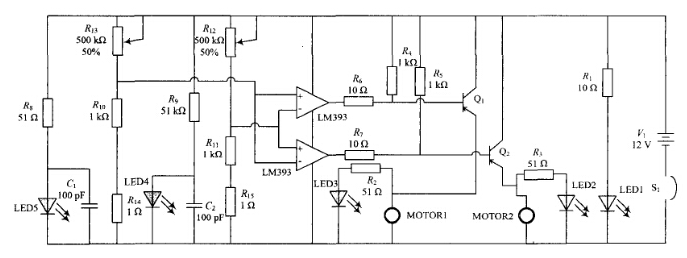
圖4 基于LM393的循跡控制電路原理圖
本小車選用紅色LED燈做光源,光源照射到白色物體和黑色(小車預(yù)定的軌跡線為黑色)物體上時的反光率是不同的。光通過地面反射到光敏電阻上,當(dāng)紅色LED光投射到白色區(qū)域和黑色軌跡線時因為反光率不同光敏電阻的阻值會發(fā)生明顯區(qū)別;通過檢測光敏電阻阻值變化能判斷小車是否行駛在黑色軌跡線上。
如果光敏電阻的阻值發(fā)生改變,說明檢測到白色區(qū)域,此時小車已跑偏;此時通過對小車的左輪或右輪的電機采取減速甚至停止,以使小車回到黑色軌跡上去,這樣循跡小車就以類似小S型的路線運行實現(xiàn)循跡功能。當(dāng)出現(xiàn)不平衡時(例如一側(cè)車輪壓在黑色軌跡線上)立即控制一側(cè)電機停轉(zhuǎn),另一側(cè)電機加速旋轉(zhuǎn),從而使小車修正方向,恢復(fù)到正確的方向上,整個過程是一個閉環(huán)控制,因此能快速靈敏地控制循跡小車運動。同時光敏電阻能夠檢測外界光線強弱,外界光線越強光敏電阻阻值越小,外界光線越弱阻值越大,便于后續(xù)電路進行控制。本循跡小車左右輪驅(qū)動采用帶減速齒輪的直流電機,直流電機驅(qū)動小車必須要減速,否則轉(zhuǎn)速過高的話小車跑得太快根本也來不及控制,而且未經(jīng)減速的話轉(zhuǎn)矩太小甚至跑不起來,本循跡小車采用的電機已經(jīng)集成了減速齒輪大大降低了制作調(diào)試難度。圖5為基于LM393控制的太陽能循跡小車的成品照片。
圖5 LM393太陽能循跡小車的成品圖
采用LM393電壓比較器作控制器電路與采用單片機作控制電路相比,由LM393電壓比較器組成的控制電路結(jié)構(gòu)更簡單,方便組裝和調(diào)試,成本也更低廉。
4.測試
首先,將小車放在黑色軌跡線白色背景測試場上(黑色跑道為小車預(yù)設(shè)行駛軌跡),并打開開關(guān)S1,S2,太陽能電池板(或蓄電池)提供電能,使電壓比較器控制兩個直流電機啟動,從而驅(qū)動小車兩側(cè)的車輪組件轉(zhuǎn)動,使小車開始沿著設(shè)計的軌跡(黑色跑道)行駛。
在小車行駛的過程中,位于小車的左右兩側(cè)發(fā)光二級管D2,D3均發(fā)出紅色光源,由于光源照射到黑色跑道和白色跑道上時的反光率不同,并且光敏電阻能夠檢測外界光線強弱,外界光線越強光敏電阻阻值越小,外界光線越弱阻值越大,因此,當(dāng)紅色LED光投射到黑色跑道和白色跑道時因為反光率不同,光敏電阻的阻值會發(fā)生明顯區(qū)別。
當(dāng)光源通過跑道反射到光敏電阻R14和R15上時,比較器根據(jù)兩邊光敏電阻阻值的變化,便可以判斷小車是行駛在黑色軌跡線上,還是行駛在白色區(qū)域上,并且通過左右兩側(cè)的二極管和光敏電阻還可以判斷小車此時正在偏向于哪一側(cè),當(dāng)出現(xiàn)不平衡時(例如小車一側(cè)壓到白色區(qū)域)立即控制一側(cè)直流電機停轉(zhuǎn),另一側(cè)直流電機則加速旋轉(zhuǎn),從而使小車修正行駛方向,并恢復(fù)到正確的行駛方向(黑色軌跡線)上。實測時,可以看到小車的左右驅(qū)動輪輪流快速轉(zhuǎn)動、停止將小車向前驅(qū)動;有個跑偏、矯正,再跑偏,再矯正的過程;但總是沿著既定的黑色軌跡前進。
結(jié)語
文中設(shè)計方案的太陽能發(fā)電循跡小車,通過測試成功實現(xiàn)了小車循跡行駛;能夠選用太陽能發(fā)電及其電瓶供電系統(tǒng),而且可靠性和抗干擾性強,線性度高、啟停快;處理了循跡小車控制回路繁雜、行車運動軌跡誤差很大的難題。僅選用LM393電壓比較器作控制板電源電路,便捷拼裝和調(diào)節(jié),成本費也更便宜,在其中選用非單片機設(shè)計操縱是本循跡小車一個特點。總的來說,應(yīng)用LM393控制的太陽能發(fā)電循跡小車適用自主創(chuàng)新和科技推廣。
責(zé)任編輯人:CC
-
太陽能發(fā)電
+關(guān)注
關(guān)注
2文章
159瀏覽量
17150 -
lm393
+關(guān)注
關(guān)注
17文章
70瀏覽量
60044 -
循跡小車
+關(guān)注
關(guān)注
42文章
65瀏覽量
68700
發(fā)布評論請先 登錄
相關(guān)推薦
LM393的所有應(yīng)用電路
LM393
【分享資料】太陽能發(fā)電基本原理—太陽能發(fā)電的原理是什么
LM393應(yīng)用電路及LM393相關(guān)的應(yīng)用資料
LM393 雙路差動比較器

太陽能發(fā)電的特點_太陽能發(fā)電的原理是什么
基于LM393的太陽能燈控制電路
LM393比較器工作原理及電路圖
LM393低功耗雙電壓比較器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論