 哈佛大學研究團隊從魚群當中獲得靈感,并研發出了一批魚類機器人
哈佛大學研究團隊從魚群當中獲得靈感,并研發出了一批魚類機器人
在海洋中,我們常常能夠看到這樣一種景象:成千上萬的魚群聚集在一起,進行十分和諧卻又似乎毫不費力的游動。這種讓人印象深刻的集體行為,通常發生在魚群進行簡單潛水、集體遷徙、躲避捕食者、閃電擴張等具體情境中。
研究人員在對此現象進行了大量的實驗和理論工作后發現,這些集體行為主要依靠一種隱形協調機制。在這種隱形協調中,個體魚類能夠對附近的“鄰居”進行視覺觀察,甚至利用身體側線感知鄰居,并且在不需要明確交流的情況下就能完成水下通信、覓食遷徙等決策。
相比之下,現有的大多數水下機器人則更多地依賴水上的、集中的、明確的溝通,能夠協調的復雜性有限。那么魚群中體現出的這種分散的、自組織的、高度自治的協調方式,長期以來吸引著機器人技術領域中科學家們的興趣。
近日,哈佛大學約翰·保爾森工程與應用科學學院(SEAS)和威斯(Wyss)生物啟發工程研究所的科學家們就從魚群當中獲得靈感,并研發出了一批魚類機器人。這些機器人不僅外表看起來像魚,還可以像魚群一樣在海洋中完成集合運動,且不受任何外部控制。與此同時,研究人員還利用這些機器人,首次展示了具有隱形協調特征的復雜三維集體行動的運作過程。
這項研究的論文是由 Florian Berlinger 博士和前威斯技術開發研究員 Melvin Gauci 博士共同撰寫的。海軍研究辦公室、威斯生物啟發工程研究所和亞馬遜 AWS 研究獎項在一定程度上為其提供了支持。該論文已于 1 月 13 日發表在《科學機器人》(Science Robotics)上。
這些機器魚整體被命名為 Blueswarm,是在 SEAS 的計算機科學學院教授和威斯學院的助理研究員 Fred Wavli 的實驗室 Radhika Nagpal 中誕生的。Nagpal 實驗室是研究自組織系統的先驅,長期以來從事自組織行為的研究,曾經研發出 1000 個名叫 kilobot 的機器人群,并受白蟻啟發研制出機器人施工隊。
但是必須要說明的是,先前研發出的大多數機器人群都只能在二維空間中進行操作,如水和空氣等的三維空間對傳感和移動等方面有著更高更難的要求與挑戰。
圖 | 機器魚(來源:Science Robotics)
正如這篇論文的第一作者弗洛里安·柏林格(Florian Berlinger)博士說的那樣:“通常情況下,機器人被部署在那些人類無法接近或危險的區域,甚至可能是人類完全無法干預的區域。在這種條件下,擁有一個能夠自給自足并且具備高自治性的機器人確實對人類很有幫助。通過使用隱形協調和 3D 視覺感知,我們能夠創建一個在水下具有高度自治性和靈活性,且即使在 GPS 和 WiFi 等信號無法發揮作用的情況下仍不受影響的系統。”
在機器魚項目的研究過程中,為了克服這些挑戰,研究人員做了一系列相關工作。首先,研究人員將單個機器魚命名為 Bluebot,給它們都裝上藍色的 LED 燈,并基于此開發了一個和視覺相關的協調系統。然后,每一個機器魚都事先配備了兩個攝像頭和三個 LED 燈。
在水下作業中,魚眼處的鏡頭相機主要負責偵查相鄰 Bluebot 的 LED 燈,并使用自定義算法確定它們之間的距離、方向和航向。通過對 LED 燈光的檢測,研究人員能夠充分實現令 Blueswarm 表現出如聚集、分散、形成環狀等復雜的自組織行為的目標任務。
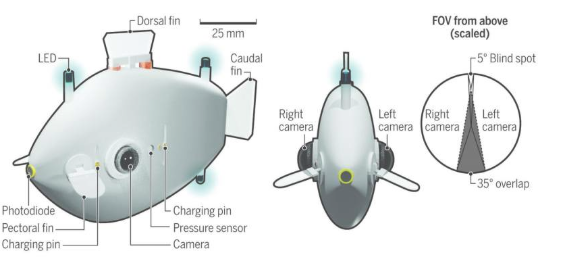
圖 | 機器魚結構圖(來源:Science Robotics)
弗洛里安·柏林格博士說:“每一個 Bluebot 都可以對鄰居的位置做出隱形反應。所以,如果我們想要這些機器人聚集在一起,那么每個 Bluebot 就會在計算出它每一個鄰居的位置后朝中心移動;如果我們想要這些機器人分散開來,這些 Bluebots 就會做相反的工作;如果我們想要它們作為一個整體,成環狀地游泳,它們就會先被按照順時針的方向編程,然后跟著前方的燈光行進。
不僅如此,研究人員還用燈箱中的紅燈模擬了一個簡單的搜索任務。研究人員先使用分散算法,讓 Bluebots 在水箱中四處散布,直到能夠靠近并成功檢測到光源為止。一旦 Bluebots 檢測到光線,它的LED燈就會開始閃爍,從而觸發算法。這樣一來,信號機器人周圍就會聚集起來 Bluebots。
Nagpal 實驗室表示:“Blueswarm 項目的研究成果可以作為研究水下自組織集體行為的重要里程碑。在這項研究中得到的成果將會在未來幫助我們開發微型的水下群,機器魚們可以在例如珊瑚礁這樣視覺豐富但脆弱的環境中進行搜索和監測。同時,該研究還通過綜合再現集體行為,為更好地了解魚群鋪平了道路。”
未來,這些機器魚將能集體行動,完成搜索失事飛機殘骸、遇難船只和落水人員等單項任務,甚至在環境監測、水域和珊瑚礁搜索等方面發揮不可忽視的重要作用。
責任編輯:lq
-
三維空間
+關注
關注
0文章
17瀏覽量
7512 -
水下機器人
+關注
關注
2文章
94瀏覽量
13714 -
3D視覺
+關注
關注
4文章
435瀏覽量
27624
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
從市場角度對機器人的基本解讀






 工商網監
工商網監
評論