") 基于AT91SAM7A3芯片和CAN收發(fā)器實(shí)現(xiàn)CAN/LIN網(wǎng)關(guān)的設(shè)計(jì)
基于AT91SAM7A3芯片和CAN收發(fā)器實(shí)現(xiàn)CAN/LIN網(wǎng)關(guān)的設(shè)計(jì)
隨著汽車電子技術(shù)的發(fā)展,CAN、LIN總線在汽車網(wǎng)絡(luò)中得到越來越廣泛的應(yīng)用。同時(shí),實(shí)現(xiàn)不同性質(zhì)、不同速率之間的網(wǎng)絡(luò)通信也成為必須要解決的問題。本文提出一種高速CAN/低速CAN/LIN網(wǎng)關(guān)的設(shè)計(jì)方案,詳細(xì)介紹了CAN、LIN節(jié)點(diǎn)電路的設(shè)計(jì)以及數(shù)據(jù)的傳輸處理過程。
隨著汽車電子的發(fā)展,傳統(tǒng)的點(diǎn)對(duì)點(diǎn)的通信已經(jīng)不能滿足現(xiàn)代汽車通信的要求。汽車電子網(wǎng)絡(luò)技術(shù)正成為實(shí)現(xiàn)汽車控制系統(tǒng)的首選,它使汽車電子技術(shù)進(jìn)入一個(gè)全新的時(shí)代。
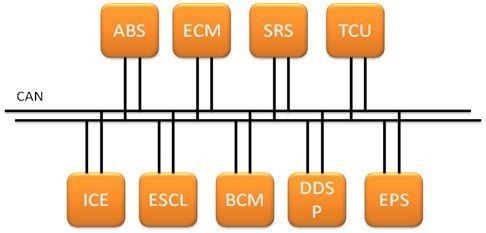
20世紀(jì)90年代,美國汽車工程師協(xié)會(huì)SAE(Society of Automotive Engineers)將汽車數(shù)據(jù)傳輸網(wǎng)分成了A、B、C三類:A類網(wǎng)絡(luò)主要面向傳感器/執(zhí)行器的低速網(wǎng)絡(luò),數(shù)據(jù)傳輸位速率一般小于10 kb/s,目前A類網(wǎng)的首選標(biāo)準(zhǔn)為LIN(LocalInterconnect Network)協(xié)議;B類網(wǎng)絡(luò)主要面向獨(dú)立模塊間數(shù)據(jù)共享的中速網(wǎng)絡(luò),數(shù)據(jù)傳輸位速率在10~125 kb/s,目前B類網(wǎng)絡(luò)主要采用低速容錯(cuò)CAN標(biāo)準(zhǔn)ISO11898-3;C類網(wǎng)絡(luò)則主要面向高速、實(shí)時(shí)閉環(huán)控制的多路傳輸網(wǎng),數(shù)據(jù)傳輸位速率在 125~1 Mb/s之間,歐洲的汽車制造商主要采用高速CAN標(biāo)準(zhǔn)ISO11898-2來實(shí)現(xiàn)該類網(wǎng)絡(luò)。下面簡要介紹一下CAN協(xié)議和LIN協(xié)議。
1986年2月,德國的Bosch公司在SAE大會(huì)上提出了CAN串行總線。時(shí)至今日,CAN已經(jīng)形成國際標(biāo)準(zhǔn),憑借自身的優(yōu)點(diǎn),不僅在汽車領(lǐng)域,而且在機(jī)械、數(shù)控機(jī)床及傳感器等領(lǐng)域都得到廣泛應(yīng)用。CAN總線的主要特點(diǎn)有:多主機(jī)的工作方式;最大傳輸速率可達(dá)1 Mb/s(通信距離最長40 m),直接通信距離可達(dá)10 km(速率小于5 kb/s);采用短幀結(jié)構(gòu),傳輸時(shí)間短;良好的檢錯(cuò)能力;非破壞總線仲裁技術(shù);較高的性價(jià)比。
LIN是1998年由BMW等五家汽車制造商、一家軟件工具制造商以及一家半導(dǎo)體廠商聯(lián)合提出的一個(gè)協(xié)議。LIN通信是基于SCI(UART)數(shù)據(jù)格式,采用單主/多從模式以及低成本的單線連接方式,最高傳輸速率可達(dá)20kb/s。LIN的從節(jié)點(diǎn)不用晶振或陶瓷振蕩器就能實(shí)現(xiàn)自同步。出于以上技術(shù)特點(diǎn), LIN總線實(shí)現(xiàn)成本較低,且完全能夠滿足A類網(wǎng)絡(luò)的通信需求。
在實(shí)際的汽車電子網(wǎng)絡(luò)中,A、B、C三類網(wǎng)絡(luò)并不是完全獨(dú)立的。為了完成車輛的控制及信息共享,不同網(wǎng)絡(luò)間必須進(jìn)行相應(yīng)的數(shù)據(jù)交換。由于是三種不同的網(wǎng)絡(luò),它們之間的通信是不能直接進(jìn)行的,而必須作相應(yīng)的協(xié)議轉(zhuǎn)換及數(shù)據(jù)處理后才能實(shí)現(xiàn),這些工作是由網(wǎng)關(guān)來實(shí)現(xiàn)的。本文提出了一種網(wǎng)關(guān)的設(shè)計(jì)方案,用以實(shí)現(xiàn)高速CAN、低速CAN及LIN三種總線網(wǎng)絡(luò)之間的通信。
1 網(wǎng)關(guān)總體結(jié)構(gòu)
本文所討論的網(wǎng)關(guān)其主要任務(wù)是解決車載網(wǎng)絡(luò)中A、B、C三類網(wǎng)絡(luò)的相互通信的問題,實(shí)現(xiàn)數(shù)據(jù)的存儲(chǔ)轉(zhuǎn)發(fā)及高、低速CAN協(xié)議之間或低速CAN與LIN協(xié)議之間的協(xié)議轉(zhuǎn)換,以便在不同網(wǎng)絡(luò)之間實(shí)現(xiàn)數(shù)據(jù)通信。網(wǎng)關(guān)主要分為4個(gè)部分:實(shí)現(xiàn)數(shù)據(jù)存儲(chǔ)轉(zhuǎn)發(fā)和協(xié)議轉(zhuǎn)換的主控制器,用于與高速CAN網(wǎng)絡(luò)連接的高速CAN 節(jié)點(diǎn)模塊,與低速CAN網(wǎng)絡(luò)連接的低速CAN節(jié)點(diǎn)模塊以及與LIN網(wǎng)絡(luò)連接的LIN節(jié)點(diǎn)模塊。網(wǎng)關(guān)系統(tǒng)的電路框圖如圖1所示。
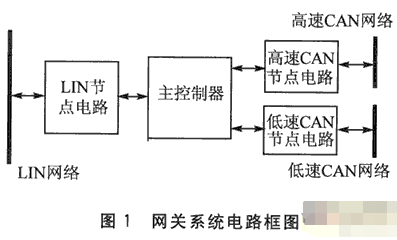
網(wǎng)關(guān)中三個(gè)節(jié)點(diǎn)電路分別與各自的網(wǎng)絡(luò)相連,且實(shí)現(xiàn)各自對(duì)應(yīng)的網(wǎng)絡(luò)與主控制器之間的數(shù)據(jù)交換。這個(gè)數(shù)據(jù)交換過程是雙向的,既包括從網(wǎng)絡(luò)上接收數(shù)據(jù)并將數(shù)據(jù)存到主控制器中,又包括從主控制器相應(yīng)的緩存器中讀取數(shù)據(jù)并將其發(fā)送到自己對(duì)應(yīng)的網(wǎng)絡(luò)中。主控制器主要負(fù)責(zé)數(shù)據(jù)的存儲(chǔ)及協(xié)議的轉(zhuǎn)換,即將各個(gè)節(jié)點(diǎn)接收來的數(shù)據(jù)根據(jù)其目的網(wǎng)絡(luò)的不同,分別存入不同的緩沖區(qū),并且根據(jù)目的網(wǎng)絡(luò)的不同,將數(shù)據(jù)轉(zhuǎn)化為能夠在目的網(wǎng)絡(luò)上傳送的數(shù)據(jù)格式。
2 網(wǎng)關(guān)電路設(shè)計(jì)
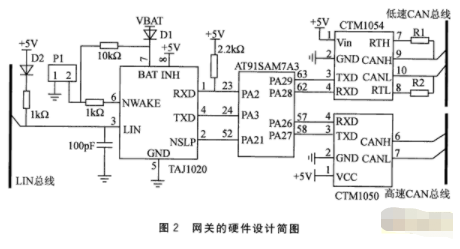
如上所述,網(wǎng)關(guān)的硬件電路主要由主控制器、高速CAN節(jié)點(diǎn)模塊、低速CAN節(jié)點(diǎn)模塊、LIN節(jié)點(diǎn)模塊4部分組成。為了滿足網(wǎng)關(guān)的正常通信要求,必須考慮主控制器的數(shù)據(jù)處理能力。另外,由于網(wǎng)關(guān)的工作環(huán)境為電磁干擾非常嚴(yán)重的汽車內(nèi)部,故還須考慮網(wǎng)關(guān)的抗噪聲干擾性能。網(wǎng)關(guān)的硬件設(shè)計(jì)簡圖如圖2所示, AT91SAM7A3為網(wǎng)關(guān)的主控制芯片,TJA1020為LIN總線收發(fā)器,CTM1054為低速CAN收發(fā)器,CTM1050為高速CAN收發(fā)器。
2.1 主控制器的選擇
實(shí)現(xiàn)數(shù)據(jù)的高效率、高質(zhì)量的存儲(chǔ)轉(zhuǎn)發(fā)是網(wǎng)關(guān)的重要目標(biāo),而主控制器是網(wǎng)關(guān)的核心器件,它的性能好壞直接決定了網(wǎng)關(guān)的效率高低。主控器對(duì)接收到的數(shù)據(jù)進(jìn)行緩存,因此主控制器需要有較高的存儲(chǔ)容量。主控器還要對(duì)它所接收與轉(zhuǎn)發(fā)的數(shù)據(jù)進(jìn)行協(xié)議轉(zhuǎn)換等數(shù)據(jù)處理,因此還要有較強(qiáng)的運(yùn)算能力。
本設(shè)計(jì)選用了Atml公司的AT91SAM7A3作為網(wǎng)關(guān)的核心控制器。這是一顆基于ARM7TDMI內(nèi)核的32位RISC處理器,具有執(zhí)行速度快、效率高的特點(diǎn),能夠滿足網(wǎng)關(guān)的數(shù)據(jù)處理要求。該芯片內(nèi)置32 KB的SRAM和256 KB的高速Flash存儲(chǔ)器,存儲(chǔ)能力強(qiáng),能夠滿足網(wǎng)關(guān)對(duì)數(shù)據(jù)存儲(chǔ)的要求。另外,該芯片內(nèi)部集成有2個(gè)功能強(qiáng)大的CAN2.OB的控制器,可以處理所有類型的幀結(jié)構(gòu)(數(shù)據(jù)幀、遠(yuǎn)程幀、錯(cuò)誤幀及過載幀),每個(gè)控制器有16個(gè)獨(dú)立的緩存區(qū)(mailbox),十分有利于實(shí)現(xiàn)網(wǎng)關(guān)高速、大容量的數(shù)據(jù)處理。集成的 CAN控制器還能夠減少器件數(shù)目和PCB布線數(shù)量,有利于提高系統(tǒng)的抗干擾性能。
2. 2 CAN節(jié)點(diǎn)設(shè)計(jì)
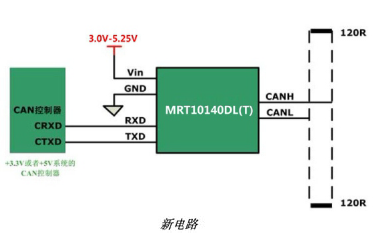
常用的CAN節(jié)點(diǎn)電路如圖3所示,它主要由MCU、CAN控制器及CAN收發(fā)器組成。為了增強(qiáng)電路的抗干擾性,還需要在控制器與收發(fā)器之間增加一個(gè)隔離電路。
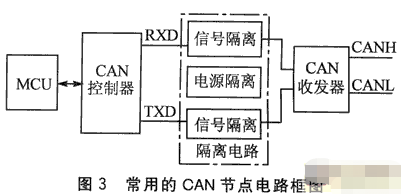
本網(wǎng)關(guān)中的CAN節(jié)點(diǎn)共有2個(gè):高速CAN節(jié)點(diǎn)和低速CAN節(jié)點(diǎn)。由于在汽車中電磁干擾現(xiàn)象非常嚴(yán)重,僅靠單個(gè)的CAN收發(fā)器難以滿足通信品質(zhì)的要求,需要加上適當(dāng)?shù)母綦x電路以提高電路的抗干擾性。
2個(gè)節(jié)點(diǎn)的MCU的功能由主控制芯片AT91SAM7A3實(shí)現(xiàn),且AT91SAM7A3中集成了兩個(gè)高性能的CAN控制器,可以分別作為高低速CAN節(jié)點(diǎn)的控制器。
常用的隔離電路采用高速光耦6N137實(shí)現(xiàn)CAN節(jié)點(diǎn)之間的信號(hào)隔離,并且采用電源隔離模塊實(shí)現(xiàn)高速光耦的兩個(gè)電源的隔離。但是這種設(shè)計(jì)無疑增加了PCB的走線,使電路的沒計(jì)變得復(fù)雜,同時(shí)隔離電路的隔離效果也受到影響。
本設(shè)計(jì)采用廣州致遠(yuǎn)電子有限公司生產(chǎn)的CTM系列的CTM1050和CTM1054,分別作為高低速CAN收發(fā)器。CTM系列的CAN收發(fā)器集成了CAN 收發(fā)器以及必需的隔離,即在一塊芯片上實(shí)現(xiàn)了隔離電路和CAN收發(fā)器的功能。這樣就不必單獨(dú)設(shè)計(jì)隔離電路,提高了集成度,使得抗干擾性得到增強(qiáng)。
高速CAN收發(fā)器CTM1050,最高速率可達(dá)1 Mb/s,完全符合ISO11898-2標(biāo)準(zhǔn)的高速CAN通信,用它作為高速CAN網(wǎng)絡(luò)接口的收發(fā)器(電路連接方法見圖2)。容錯(cuò)CAN收發(fā)器 CTM1054,最高通信速率可達(dá)125 kb/s,完全符合ISO11898-3標(biāo)準(zhǔn),用它作為低速CAN網(wǎng)絡(luò)接口的收發(fā)器(電路連接方法見圖2)。需要注意的是,在CTM1054的連接中,有 2個(gè)電阻R1和R2的阻值要根據(jù)低速CAN網(wǎng)絡(luò)中節(jié)點(diǎn)的個(gè)數(shù)來確定。具體值的算法見CTM1054使用手冊(cè)。
2.3 LIN接口設(shè)計(jì)
LIN總線是一主多從的總線連接方式,節(jié)點(diǎn)有主從之分。在本設(shè)計(jì)中,將LIN節(jié)點(diǎn)設(shè)計(jì)為主節(jié)點(diǎn)。LIN是一個(gè)基于單線串行的通信協(xié)議,對(duì)于硬件的要求比較簡單。通常一個(gè)有SCI/UART接口的單片機(jī)和一個(gè)LIN收發(fā)器就可組成LIN節(jié)點(diǎn)。本設(shè)計(jì)利用AT91SAM7A3的UART口和LIN收發(fā)器 TJA1020組成一個(gè)LIN主節(jié)點(diǎn)。
TJA1020使用的波特率可從2.4~20 kb/s,有較好的保護(hù)功能:總線終端和電池引腳可防止汽車環(huán)境下的瞬變、總線終端對(duì)電池和地的短路保護(hù)以及過熱保護(hù)等,可以作為汽車通信中的LIN通信接口(具體電路連接見圖2)。
3 網(wǎng)關(guān)軟件設(shè)計(jì)
網(wǎng)關(guān)的軟件系統(tǒng)主要包括主監(jiān)控程序、數(shù)據(jù)的發(fā)送、數(shù)據(jù)的接收、數(shù)據(jù)的處理(包括協(xié)議轉(zhuǎn)換和緩沖區(qū)內(nèi)數(shù)據(jù)的讀寫處理)等幾部分。
3.1 主監(jiān)控程序
如圖4所示,在主控制器AT91SAM7A3中劃出4塊緩沖區(qū)BUF1~BUF4,每一塊緩沖區(qū)中的數(shù)據(jù)都有明確而且唯一的來源和目的地。主監(jiān)控程序主要通過循環(huán)依次查詢BUF1~BUF4中的存儲(chǔ)情況,來決定是否發(fā)送數(shù)據(jù)以及將數(shù)據(jù)發(fā)送給誰。
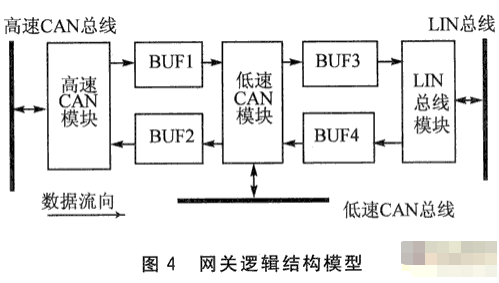
當(dāng)高速CAN網(wǎng)絡(luò)上有數(shù)據(jù)需要接收的時(shí)候,通過高速CAN模塊接收數(shù)據(jù),對(duì)接收到的數(shù)據(jù)進(jìn)行處理后,將其存到緩沖區(qū)BUF1中,再由低速CAN模塊將其發(fā)送到低速CAN網(wǎng)絡(luò)上;當(dāng)LIN網(wǎng)絡(luò)上有數(shù)據(jù)需要接收時(shí),通過LIN總線模塊接收數(shù)據(jù),對(duì)接收到的數(shù)據(jù)進(jìn)行數(shù)據(jù)格式轉(zhuǎn)換(LIN格式的報(bào)文幀轉(zhuǎn)換為CAN 格式的報(bào)文幀),再將其存入到緩沖區(qū)BUF4中,并由低速CAN模塊將其發(fā)送到低速CAN網(wǎng)絡(luò)上;當(dāng)?shù)退貱AN網(wǎng)絡(luò)上有數(shù)據(jù)需要接收時(shí),先接收數(shù)據(jù),然后判斷數(shù)據(jù)是發(fā)送到高速CAN總線,還是發(fā)送到LIN總線,根據(jù)判斷結(jié)果對(duì)數(shù)據(jù)進(jìn)行處理,存入相應(yīng)的緩沖區(qū)(如數(shù)據(jù)是發(fā)往高速CAN總線,則存入BUF2,否則存入BUF3)。
3.2 數(shù)據(jù)的發(fā)送
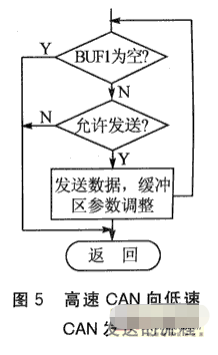
數(shù)據(jù)的發(fā)送由發(fā)送子程序完成,網(wǎng)關(guān)中主要有3個(gè)發(fā)送子程序,分別對(duì)應(yīng)兩路CAN控制器以及一路 LIN發(fā)送器。高速CAN的發(fā)送子程序負(fù)責(zé)發(fā)送BUF1中的數(shù)據(jù),LIN的發(fā)送子程序負(fù)責(zé)發(fā)送BUF3中的數(shù)據(jù),低速CAN的發(fā)送子程序負(fù)責(zé)發(fā)送BUF2 和BUF4中的數(shù)據(jù)。數(shù)據(jù)的發(fā)送采用查詢總線狀態(tài)的發(fā)送方式:查詢總線的忙閑情況,如果總線忙,則退出發(fā)送子程序,進(jìn)行其他的工作;如果總線空閑,則發(fā)送數(shù)據(jù)。發(fā)送完1幀數(shù)據(jù)后,再檢查與之相應(yīng)的緩沖區(qū)的狀態(tài)。如果為空,則退出發(fā)送子程序;如果非空,則再檢查總線的忙閑狀態(tài)。如果忙,則退出發(fā)送子程序;如果空閑,則發(fā)送數(shù)據(jù)。然后再開始新一輪的數(shù)據(jù)查詢發(fā)送過程。圖5為高速CAN向低速CAN發(fā)送的流程,其他的發(fā)送子程序過程與此類似。
3.3 數(shù)據(jù)的接收
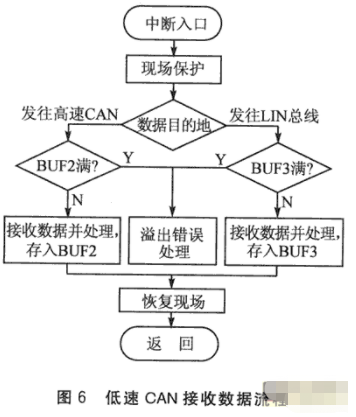
數(shù)據(jù)接收是從總線上接收數(shù)據(jù),進(jìn)行必要的協(xié)議轉(zhuǎn)換,再將轉(zhuǎn)換后的數(shù)據(jù)存人相應(yīng)的緩沖區(qū)。網(wǎng)關(guān)中有3個(gè)接收子程序,分別對(duì)應(yīng)兩路CAN控制器及一路LIN發(fā)送器。數(shù)據(jù)接收采用中斷方式,由于不同網(wǎng)絡(luò)有不同的實(shí)時(shí)性要求,因此為3個(gè)接收程序設(shè)定了不同的中斷級(jí)別。高速CAN的實(shí)時(shí)性要求最高,中斷級(jí)別也設(shè)為最高;而LIN總線的實(shí)時(shí)性在三者中最低,故中斷級(jí)別也最低。當(dāng)一個(gè)接收中斷發(fā)生后,進(jìn)入接收中斷子程序,判斷相應(yīng)的緩沖區(qū)是否已滿(低速CAN的接收程序在接收到數(shù)據(jù)后需要根據(jù)數(shù)據(jù)的目的網(wǎng)絡(luò)確定緩存區(qū)為BUF2還是BUF3)。如果緩沖區(qū)已滿,則產(chǎn)生一個(gè)溢出錯(cuò)誤標(biāo)志;如果沒有滿,則將數(shù)據(jù)進(jìn)行相應(yīng)的協(xié)議轉(zhuǎn)換,并將轉(zhuǎn)換后的數(shù)據(jù)存入相應(yīng)的緩存區(qū),退出中斷并完成接收。圖6所示為低速CAN數(shù)據(jù)接收過程的簡要流程。
3.4 數(shù)據(jù)的處理
網(wǎng)關(guān)的數(shù)據(jù)處理是指協(xié)議的轉(zhuǎn)換和數(shù)據(jù)在緩沖區(qū)的存儲(chǔ)與轉(zhuǎn)發(fā)。每當(dāng)接收到一組數(shù)據(jù)時(shí),首先進(jìn)行協(xié)議轉(zhuǎn)換,然后再將其存入到相應(yīng)的緩存區(qū)。高低速CAN的協(xié)議相同,并不需要轉(zhuǎn)換,因此主要是進(jìn)行CAN協(xié)議和LIN協(xié)議之間的轉(zhuǎn)換。
CAN協(xié)議和LIN協(xié)議都是以幀(frame)為數(shù)據(jù)單位進(jìn)行通信的。在進(jìn)行LIN協(xié)議到CAN協(xié)議的轉(zhuǎn)換時(shí),首先是將LIN幀分解,從標(biāo)識(shí)符場(chǎng) (identfield)提取出其中的ID標(biāo)識(shí)符,從數(shù)據(jù)場(chǎng)(data field)提取出有效數(shù)據(jù),然后根據(jù)這些信息封裝成符合要求的CAN幀格式。CAN協(xié)議到LIN協(xié)議的轉(zhuǎn)換過程亦是如此。先將CAN幀分解,從仲裁域 (arbitration field)和數(shù)據(jù)域(data field)中提取出有用信息,然后封裝成符合要求的LIN幀格式。
數(shù)據(jù)的4個(gè)緩沖區(qū)BUF1~BUF4為FIFO(First InFirst Out)緩沖區(qū),本文采用循環(huán)隊(duì)列(circular queue)來實(shí)現(xiàn)數(shù)據(jù)的先進(jìn)先出。兩個(gè)指針Read和Write分別指示隊(duì)頭元素和隊(duì)尾元素在緩沖區(qū)空間中的位置,它們的初值在隊(duì)列初始化時(shí)均應(yīng)置為 0,每讀取或?qū)懭胍淮螖?shù)據(jù),都要對(duì)緩沖區(qū)的參數(shù)進(jìn)行調(diào)整。寫數(shù)據(jù)時(shí),將新元素插入Write所指的位置,然后將Write加1;讀數(shù)據(jù)時(shí),刪去Read所指的元素,然后將Read加1并返回被刪元素。
4 網(wǎng)關(guān)通信測(cè)試
將網(wǎng)關(guān)的高速CAN接口和低速CAN接口分別與單獨(dú)的CAN節(jié)點(diǎn)電路相連,LIN接口與單獨(dú)的LIN從節(jié)點(diǎn)相連,組成測(cè)試網(wǎng)絡(luò)。測(cè)試的主要內(nèi)容為高速 CAN和低速CAN之間的通信,低速CAN和LIN網(wǎng)絡(luò)之間的通信。高速CAN網(wǎng)絡(luò)采用速率為500 kb/s,低速CAN網(wǎng)絡(luò)采用的速率為100kb/s,LIN網(wǎng)絡(luò)采用的速率為10 kb/s。利用PC機(jī)的串口發(fā)送測(cè)試數(shù)據(jù),同時(shí)在另一個(gè)串口終端上進(jìn)行數(shù)據(jù)的監(jiān)測(cè)。測(cè)試結(jié)果表明,發(fā)送數(shù)據(jù)內(nèi)容與監(jiān)測(cè)到的數(shù)據(jù)內(nèi)容一致。
5 總 結(jié)
以AT91SAM7A3為核心設(shè)計(jì)的一款CAN/LIN混合網(wǎng)關(guān),實(shí)現(xiàn)了汽車網(wǎng)絡(luò)中高速CAN總線、容錯(cuò)CAN總線及LIN總線三類網(wǎng)絡(luò)之間的通信,使汽車中的各類網(wǎng)絡(luò)的信息能夠有效共享,實(shí)現(xiàn)了不同性質(zhì)網(wǎng)絡(luò)的互聯(lián)。
責(zé)任編輯:gt
-
芯片
+關(guān)注
關(guān)注
456文章
51170瀏覽量
427212 -
收發(fā)器
+關(guān)注
關(guān)注
10文章
3454瀏覽量
106240 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6658瀏覽量
110884
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
我想問下 AT91SAM7A3-AU 是用在CAN/LIN息線的汽車混合網(wǎng)關(guān) 是用在什么汽車上的 清教下哪位大神知道是用在哪個(gè)汽車上的
一種基于Salvo的通用CAN/LIN網(wǎng)關(guān)
CTM8251A CTM8251AT通用CAN隔離收發(fā)器產(chǎn)品
RS-485收發(fā)器和CAN收發(fā)器有什么區(qū)別
MRT1040DL通用CAN通信收發(fā)器芯片的中文數(shù)據(jù)手冊(cè)免費(fèi)下載
深入探析CAN收發(fā)器各項(xiàng)參數(shù)

關(guān)于兼容CAN FD的系統(tǒng)基礎(chǔ)芯片(SBC)的性能分析和應(yīng)用介紹
關(guān)于英飛凌CAN FD收發(fā)器芯片的作用分析
CAN控制器和收發(fā)器

NXP CAN收發(fā)器的特點(diǎn)及應(yīng)用
CAN控制器、CAN收發(fā)器、CAN驅(qū)動(dòng)器的區(qū)別是什么?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論