 基于嵌入式處理器S698-T芯片實現機器人移動平臺電控系統的設計
基于嵌入式處理器S698-T芯片實現機器人移動平臺電控系統的設計
作者:董文岳,林國偉,梁文海
1、引言
近年來人工智能(AI)已成為國際上技術創新研究的一個熱點,各種工業機器人、服務機器人等機器人產品的應用日益廣泛,而作為機器人的“腳”,機器人移動平臺也要具備豐富的功能和高度的智能化,不但需要實現高靈活性的移動能力和良好的越障能力,而且要求臺配置有多種傳感器,配合機器人的“大腦”可以實現自動避障越障、自主進行路徑規劃、地圖構建等功能。
多功能智能移動平臺電控系統作為機器人移動平臺的“神經中樞”,是實現機器人移動平臺智能化設計的關鍵設計。本文分析多功能智能移動平臺的功能性能需求,基于高可靠嵌入式處理器S698-T芯片,提出一個多功能智能移動平臺電控系統的設計方案,為各種機器人移動平臺的設計提供一個良好的解決方案。
2、系統需求
根據機器人移動平臺功能、性能要求,電控系統擬采用PC+嵌入式系統架構,由上位機系統和下位機系統兩個部分組成,上位機采用PC+傳感器實現,下位機基于高可靠嵌入式SPARC架構處理器S698-T設計,上位機與下位機之間采用RS422總線進行數據/命令交互,預留CAN2.0總線通訊接口。
2.1 上位機性能需求
上位機作為多功能智能移動平臺的“大腦”,主要實現多功能智能移動平臺的視覺功能、地圖構建以及導航等功能。
上位機要求采用Intel -X86 i5以上CPU的工業級嵌入式主板實現,并基于嵌入式主板的USB、PCIe、以太網、RS422以及SIM卡接口等外圍接口,集成二維/三維激光(室內/外)傳感器、相機(預留)、CAN總線通訊模塊等外圍模塊
2.2 下位機性能需求
下位機作為多功能智能移動平臺的指令執行控制以及部分傳感器的輸入采集處理平臺,主要實現電機驅動控制功能以及紅外測距、超聲波測距等傳感器輸入參數采集處理功能,并通過RS422總線(備用CAN總線)與上位機建立通訊,具體需求如下:
1、主處理器:S698-T,主頻100MHZ;
2、協處理器:FPGA;
3、板載內存:SRAM:1Mbit,FLASH:1Mbit;
4、提供7路紅外測距傳感器信號采集接口,接口為12bit的A/D采集輸入,輸入為最大3.3V模擬信號;
5、提供6路超聲波測距傳感器的輸入接口,要求為信號電平為TTL3.3V的RS232接口,波特率可配置(4800bps ~ 115200bps);
6、提供1路GPS模塊的輸入接口,要求為信號電平為TTL3.3V的RS232接口,波特率可配置(4800bps ~ 115200bps);
7、提供3路慣導單元IMU的輸入接口,接口要求為I2C接口,預留SPI接口;
8、提供6路PWM信號輸出、18路IO信號輸出(6路方向控制、6路使能控制、6路電機剎車信號)用于控制電機驅動,要求信號光耦隔離5V輸出;
9、提供6路IO信號采集,用于霍爾反饋PWM捕獲,輸入信號為脈沖信號,最大頻率為5KHz;
10、提供2路CAN2.0總線接口以及2路RS422總線接口,用于與上位機通訊;
11、提供對上位機進行電源上下電控制功能;
12、提供1路A/D用于電源電壓采集,1路A/D用于溫度采集;
13、具備溫度采集功能,提供1路預留RS232接口;
14、工作溫度:-40℃~+60℃;
3 、系統組成

圖1 系統框圖
如圖1所示,電控系統主要由上位機和下位機模塊兩部分組成,其中上位機包含以下組成部分:
1、嵌入式主板:1個;
2、CAN總線模塊:1個;
3、二維/三維激光(室內/外)傳感器:1個;
4、相機(預留):1個;
下位機包含以下組成部分:
1、基于S698-T+FPGA控制器模塊:1個;
2、紅外測距傳感器:7個;
3、超聲波測距傳感器:6個;
4、GPS模塊:1個;
5、慣導單元IMU:3個;
6、電機及驅動模塊:6組;
4、系統設計
本電控系統的上位機主要涉及到硬件選型以及軟件開發,本文暫不對其設計展開詳述,主要對下位機的設計方案進行詳述。
下位機主要由主控制器模塊以及電機驅動、超聲波傳感器、紅外傳感器、慣導模塊等周邊相關外設組成,其中主控制器模塊基于S698-T設計,具體方案如下:
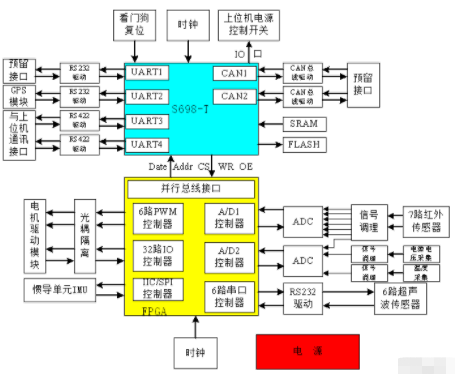
圖2 基于S698-T+FPGA的控制器模塊系統框圖
如圖2所示,下位機主控制器模塊采用S698-T+FPGA的架構,S698-T作為主處理器,其外圍設計SRAM、FLASH、硬件看門狗復位、時鐘等模塊,構成一個S698-T的最小系統,再根據外圍接口需要,使用S698-T片內的4路RS232總線接口以及2路CAN總線接口,實現2路RS232接口、2路RS422接口以及2路CAN總線接口。
控制器模塊采用FPGA作為協處理器,并通過并行總線將FPGA掛接在S698-T的IO空間上,實現與S698-T的協同處理。FPGA根據系統功能需要,片內設計了兩個ADC控制器、6路串行總線控制器、6路PWM輸出控制器、32路IO控制器、IIC/SPI接口控制器以及并行接口控制器等功能模塊,同時外接相關驅動電路實現系統的接口需求。
控制器模塊采用12V DC供電,板上設計有DC-DC電源模塊,實現12VDC到+1.2VDC、+2.5VDC、+3.3VDC、+5VDC的轉換,供板上相關器件使用。
4.1 主處理器設計
控制器模塊的主處理器設計主要是S698-T最小系統+外圍接口驅動電路的設計,S698-T最小系統主要包括S698-T、SRAM、FLASH、硬件看門狗復位電路、時鐘電路以及調試用的DSU接口電路。
高可靠處理器S698-T簡介:
1、采用哈弗體系結構(Harvard architecture);
2、具備整型單元(IU:Integer Unit):
? 32位RISC,采用SPARC V8(IEEE-1754)指令集;
? 5級指令流水(預取、譯碼、執行、存儲、回寫);
? 具有硬件乘法器和硬件除法器;
? 支持MAC和UMAC等DSP指令;
3、浮點處理單元(FPU:Floating Point Unit)
? 遵循IEEE-754標準;
? 支持單/雙精度;
4、具有彼此分離的大容量指令Cache 32K Bytes和數據Cache 16K Bytes;
5、片內總線遵循AMBA2.0標準,采用AHB總線聯接片內高速設備,采用APB總線聯接片內低速設備;
6、在線硬件調試支持單元(DSU:Debug Support Unit):
? 無需外置仿真器的支持即可實現硬件在線直接調試;
? 可實現對內部資源(如寄存器、用戶可用RAM等)的操作;
? 可實現程序斷點設置;
7、集成存儲器控制器(MCTRL:Memory Controller):
? 支持外部SRAM、SDRAM、ROM 以及MAP I/O等類型的存儲器;
? SRAM、ROM及MAP I/O的數據總線寬度可通過軟件配置成32/16/8 位三種模式;
? SRAM、ROM及MAP I/O的存取時間參數可配置;
? 支持5個SRAM Bank、2個SDRAM Bank、2個ROM Bank、1個IO Bank;
? 尋址空間2048M Bytes;
? ROM尋址空間:512M Bytes;
? MAP I/O尋址空間:512M Bytes;
? SRAM/SDRAM尋址空間:1024M Bytes;
8、集成1553B 、ARINC429、CAN、串口等數據總線控制器;
9、集成多功能IO接口(MFIO):
? 集成16路獨立的多功能IO接口;
? 各路的輸入或輸入方向可以獨立配置;
? 各路均可以輸出周期、占空比、電平極性、脈沖數目等參數可調的PWM信號;
? 各路均具有輸入脈沖計數功能;
11、生產工藝:130nm CMOS;
12、工作頻率:
? 最高主頻(IUCLK):200MHz;
? 最高外頻(SYSCLK):100MHz;
13、處理能力:
? 180MIPS@200MHz;
? 55MFLOPS(Double Precision)@200MHz;
14、峰值功耗:不高于1.5W@200MHz;
15、電源電壓
? 3.3V±0.3V(IO);
? 1.2V±0.1V(CORE);
16、工作環境溫度
? 工業級-40℃~+85℃(塑封PBGA352);
? 軍品級-55℃~+125℃(陶封CBGA352);
控制器模塊的主處理器的主要元器件選型如下:
1) 主控制器:S698-T,工作主頻為100MHz;
2) SRAM:IS61LV51216-10TI,容量為512k*16bit;
3) FLASH:39VF040-90-4I-NH,容量為512k*8bit;
4) 看門狗:TPS3813K33MDBVREP;
5) 時鐘:有源晶振,10MHz;
6) DSU接口/RS232總線接口驅動芯片:MAX3232ESE;
7) CAN總線驅動芯片:TJA1042t;
8) RS422總線驅動芯片:MAX488ESA;
9) 上位機電源控制開關:選用歐姆龍繼電器G6k-2F;
4.2 協處理器設計
控制器模塊的主處理器設計主要是FPGA最小系統+外圍接口驅動電路的設計,FPGA設計包括硬件設計以及FPGA邏輯設計,對于FPGA邏輯設計本文只提出設計需求,具體如下:
1) 具備2個ADC控制器功能,ADC采用ADS8555;
2) 具備6路串口控制器功能,波特率可設置,收發緩存不小于32Byte;
3) 具備6路PWM輸出控制器功能;
4) 具備32路IO輸入輸出功能,輸入可識別脈沖頻率不小于5KHz;
5) 具備8路IIC和SPI接口控制器功能;
6) 具備與S698-T進行交互的并行接口功能;
7) 時鐘資源:時鐘可采用S698-T的時鐘輸出作為FPGA時鐘輸入,同時FPGA外接33MHz晶振;
控制器模塊的協處理器的主要元器件選型如下:
1) FPGA:選用Altera FPGA;
2) 時鐘:有源晶振,33MHz;
3) ADC:選用ADS8555;
4) 光耦隔離:HCPL-2630;
5) RS232總線接口驅動芯片:MAX3232ESE;
4.3電源供電設計
控制器模塊采用+12VDC供電,模塊內部需要用到的電源包括+5VDC、+3.3VDC、+2.5VDC、+1.2VDC,因此需要選用DC-DC模塊芯片進行設計,具體選型如下:
1) 12V轉5V:LM2596T_5.0;
2) 5V轉3.3V:LT1963AMP-3.3V;
3) 5V轉2.5V:LT1963AMP-2.5V;
4) 5V轉1.2V:NCP565D2T12;
4.4 軟件設計
基于高可靠處理S698-T進行多功能智能移動平臺電控系統的設計,涉及到S698-T的控制軟件設計,在此我們引入了嵌入式實時多任務操作系統(EOS)--RTEMS,利用珠海歐比特控制工程股份有限公司開發的基于此操作系統的Orbita EOS嵌入式操作系統及其Orbita EOS 開發工具,可大大提高軟件編程效率和可靠性,具體可參考(Orion4.0用戶手冊)。
5、結束語
在當今人工智能的熱潮下,多功能智能移動平臺的應用也日益廣泛,各種應用場景對其電控系統提出了多種多樣的要求,本文針對市面廣泛的需求,提出一種基于S698-T的多功能智能移動平臺電控系統的設計方案,可兼容市面的各種需求,為后續多功能智能移動平臺的設計提供一種有效的參考。
責任編輯:gt
-
處理器
+關注
關注
68文章
19407瀏覽量
231180 -
嵌入式
+關注
關注
5092文章
19177瀏覽量
307653 -
機器人
+關注
關注
211文章
28641瀏覽量
208402
發布評論請先 登錄
相關推薦
辰漢-如何實現服務機器人的運算與控制
【下載】《嵌入式系統設計與實例開發:基于ARM微處理器與μC/OS-2實時操作系統》
【下載】《 嵌入式系統設計與實例開發:基于ARM微處理器與μC/OS-2實時操作系統》
如何利用ARM研究嵌入式服務機器人控制器?
RIO嵌入式控制平臺怎么助力機器人應用?
嵌入式技術在機電控制系統有什么應用?
如何實現移動機器人的設計?
S698-T芯片開發系統S698T-Dkit使用說明書

S698-T芯片開發系統S698T-Dkit使用說明書下載





 工商網監
工商網監
評論