") 基于單片機(jī)的藍(lán)牙控制小車設(shè)計(jì)
基于單片機(jī)的藍(lán)牙控制小車設(shè)計(jì)
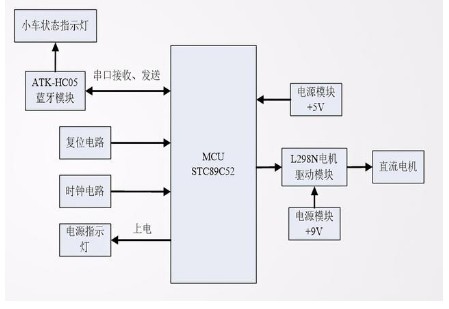
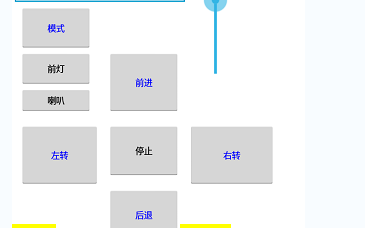
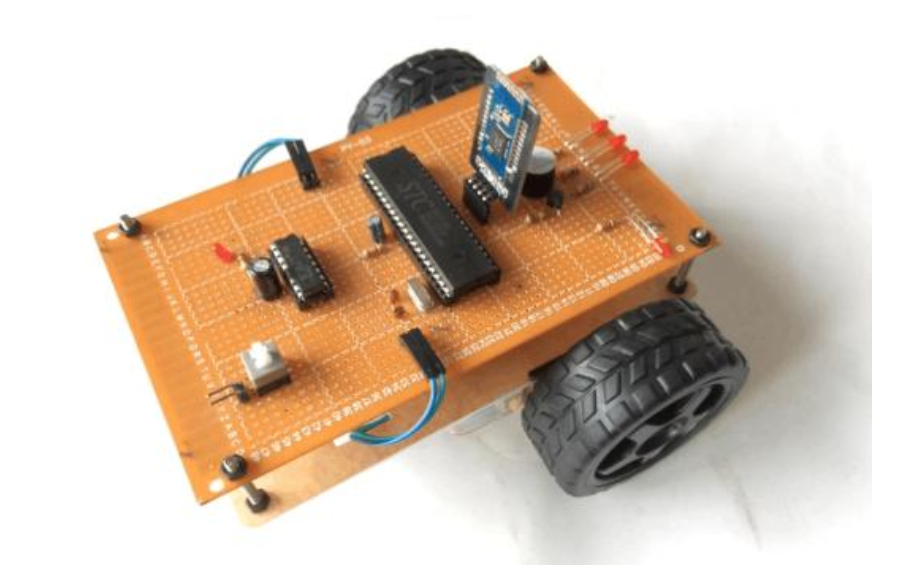
本設(shè)計(jì)以STC89C52為核心,結(jié)合HC-06藍(lán)牙模塊、L298N電機(jī)模塊,通過電路連接,設(shè)置手機(jī)界面,實(shí)現(xiàn)安卓手機(jī)通過藍(lán)牙控制小車前進(jìn)、后退、加速、減速、左轉(zhuǎn)、右轉(zhuǎn)等功能。框圖如下:
一、藍(lán)牙接線:
1、 VCC引腳是接電源的正極。
2、GND:直接接地。
3、TXD:接單片機(jī)的RXD引腳。
4、RXD:接單片機(jī)的TXD引腳。
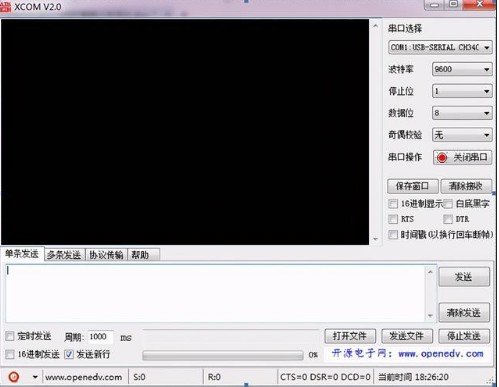
藍(lán)牙接線調(diào)試:
用串口調(diào)試助手,來發(fā)送AT指令。
1、發(fā)送AT+ROLE=0,設(shè)置為從機(jī)狀態(tài)
2、發(fā)送AT+UART=9600,0,0。
3、發(fā)送AT+NAME=ch。
4、發(fā)送AT+PSWD=199128。
此時(shí)藍(lán)牙波特率為9600,名字zhhg,密碼123148。
二、電機(jī)設(shè)計(jì)
L298N是ST公司生產(chǎn)的一種高電壓、大電流電機(jī)驅(qū)動(dòng)芯片。具有驅(qū)動(dòng)能力強(qiáng),發(fā)熱量低,抗干擾能力強(qiáng)的特點(diǎn)。

電機(jī)用L298N驅(qū)動(dòng),供電電壓選用的是9V,IN1、IN2、IN3、IN4分別接單片機(jī)得普通IO口,用定時(shí)器模擬PWM波形,實(shí)現(xiàn)加速減速。
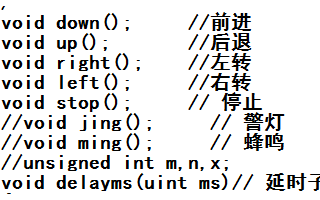
三、軟件設(shè)計(jì)
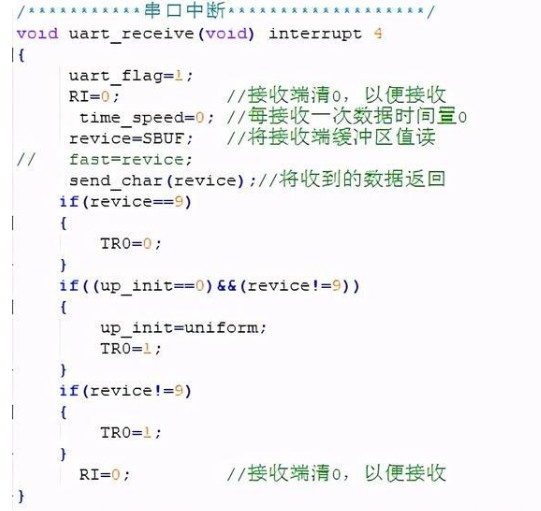
1.藍(lán)牙模塊通過手機(jī)相連,接收手機(jī)發(fā)送的指令并返回,數(shù)據(jù)處理,若接收到的數(shù)據(jù)在程序中有相應(yīng)的功能指示,則運(yùn)行其相應(yīng)的功能。
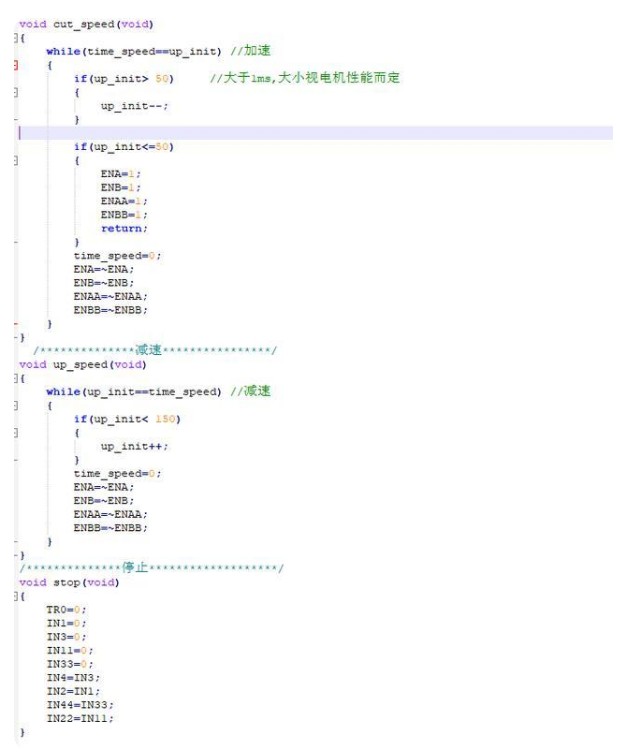
2.電機(jī)驅(qū)動(dòng)模塊主要起驅(qū)動(dòng)作用,手機(jī)間接控制,受控于單片機(jī),主要作用是驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)。需程序通過IO口輸出PWM波形驅(qū)動(dòng),由定時(shí)器產(chǎn)生PWM波形,實(shí)現(xiàn)對(duì)PWM波形周期的控制,產(chǎn)生不同頻率的波形,實(shí)現(xiàn)電機(jī)的加減速。
3.本設(shè)計(jì)主要運(yùn)用了藍(lán)牙模塊與串口模塊通信,手機(jī)與藍(lán)牙模塊對(duì)接,控制電機(jī)驅(qū)動(dòng)模塊,驅(qū)動(dòng)電機(jī)運(yùn)行的原理。
程序部分截圖:
四、調(diào)試
系統(tǒng)的調(diào)試主要分為軟件調(diào)試、硬件調(diào)試和系統(tǒng)整體調(diào)試三大部分。
硬件電路調(diào)試:
1、獨(dú)立元件的檢測
2、單片機(jī)最小系統(tǒng)的檢測
3、藍(lán)牙模塊的調(diào)試
4、電機(jī)模塊的調(diào)試
5、總體調(diào)試
軟件調(diào)試:
本設(shè)計(jì)需要用的模塊有串口和定時(shí)器,注意串口初始化,設(shè)置波特率9600。T0需初始化為定時(shí)器,采用方式2,最長可定時(shí)512us,注意串口中斷優(yōu)先級(jí)高于定時(shí)器優(yōu)先級(jí)。
整體調(diào)試:
當(dāng)軟件調(diào)試和硬件調(diào)試都完成之后,將軟件下載到硬件電路中,觀察硬件電路是否能夠按照要求運(yùn)行,如果不能,繼續(xù)分析問題,并將問題模塊找出。
責(zé)任編輯:tzh
-
單片機(jī)
+關(guān)注
關(guān)注
6043文章
44621瀏覽量
638566 -
藍(lán)牙
+關(guān)注
關(guān)注
114文章
5867瀏覽量
171218 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9082瀏覽量
146373
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
求高手改程序,51單片機(jī)藍(lán)牙控制小車
單片機(jī) 藍(lán)牙控制小車
基于51單片機(jī)的藍(lán)牙控制小車的簡單實(shí)現(xiàn)(有源代碼,無圖)
如何通過藍(lán)牙單片機(jī)APP實(shí)現(xiàn)藍(lán)牙小車控制?
基于51單片機(jī)的藍(lán)牙控制小車
【51】基于51單片機(jī)的藍(lán)牙控制小車的簡單實(shí)現(xiàn)(有源代碼,無圖)
基于藍(lán)牙的51單片機(jī)藍(lán)牙小車設(shè)計(jì)資料合集包括軟件,源碼,apk界面等
使用51單片機(jī)實(shí)現(xiàn)藍(lán)牙小車的程序免費(fèi)下載
51單片機(jī)藍(lán)牙小車

51單片機(jī)藍(lán)牙小車(精要版)
基于51單片機(jī)的藍(lán)牙循跡小車
51單片機(jī)藍(lán)牙循跡小車





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論