") 詳細(xì)解析RAC定位
詳細(xì)解析RAC定位
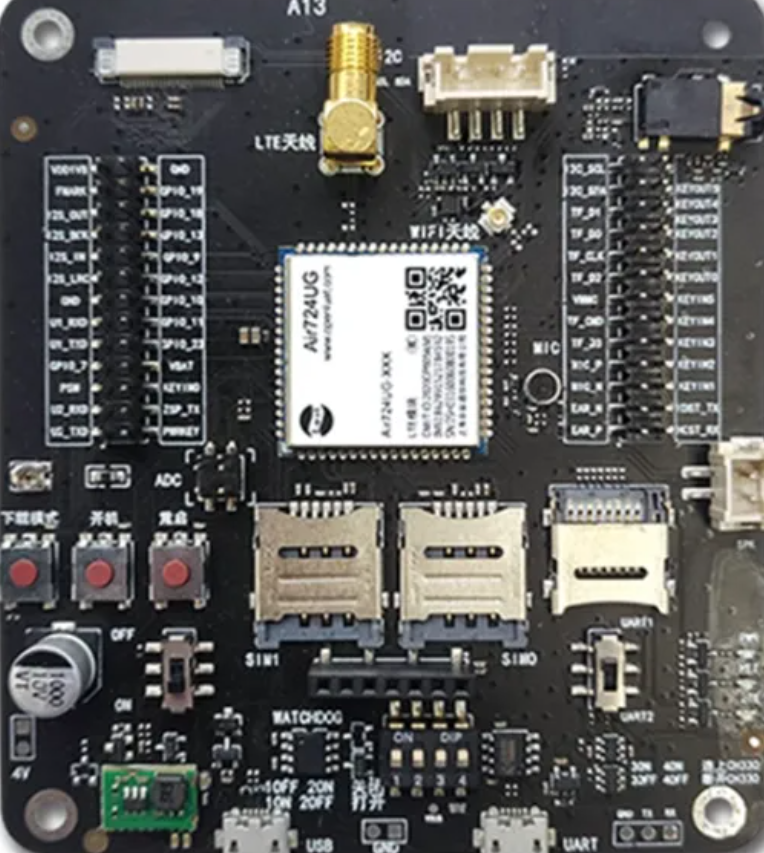
筆者因為工作原因,接觸到一種叫做RAC的定位產(chǎn)品,該定位產(chǎn)品不同于一般的定位模組,它產(chǎn)品外表看起來很像一個GPS定位天線,通過一個4芯線纜(供電+串口通信)直接和其它MCU/CPU 相連接,輸出定位信息。以下是該公司的兩款終端產(chǎn)品:
該產(chǎn)品牛逼的地方在于,它可以不依賴于任何差分站(地基或者星基),就可以實現(xiàn)優(yōu)于1米的定位精度,帶來的好處是:
相比一般的普通定位模組,精度大幅度提高;
相比RTK高精度定位,成本會大幅度下降(RTK本身模組價格高且需要支付差分服務(wù)費)。
它是如何做到這一點的呢?它用了一種叫做RAC的定位技術(shù),RAC是Realtime Array Calibration的縮寫,譯為“實時陣列校準(zhǔn)”,它是通過創(chuàng)新的天線陣列設(shè)計方案和軟件算法,使得水平定位誤差大大減小,大大提高了定位的精度和穩(wěn)定性。
簡單來說就是該產(chǎn)品里有3個普通的Ublox定位模組+3個天線陣列,3個天線擺成一個三角形形狀,理論上這三個模組的定位結(jié)果和預(yù)知的三角形相對位置是一致的,但是由于實際中存在誤差并不會完全一致,這時通過軟件算法,不斷的修正定位結(jié)果,逐漸減小誤差。
具體實現(xiàn)細(xì)節(jié),那是人家的核心技術(shù),咱就搞不懂了,畢竟該公司創(chuàng)始人20年前就在歐洲研究GPS了,我那會還在上小學(xué)呢,所以里面肯定是有很多黑科技的。
說了這么多,下面咱們實測看看效果吧,先測測靜態(tài)單點定位效果,我將它放在了樓下地面的一個小欄桿上,靜態(tài)觀測了5分鐘,這兩天外面忒冷了。..
實際定位效果如下:
我們可以看到誤差基本上都在50cm以內(nèi),當(dāng)然這是和自己的定位平均值相比,是相對精度。絕對精度就得找那種幾十萬的高精度定位設(shè)備比了,我也想比比看,可是條件不允許啊,據(jù)說和他們相比誤差在幾十個cm左右。
單從靜態(tài)測試就可以明顯的看到,相比一般的普通定位模組,它的相對精度明顯要高,不過確實比不上RTK,因為之前測過Ublox的F9P,空曠環(huán)境靜止時可以到幾個cm級別精度。
動態(tài)情況下,它的優(yōu)勢在于整個軌跡的連續(xù)性,對遮擋環(huán)境更加不敏感,比如高樓處、立交橋下等環(huán)境。該產(chǎn)品真正的優(yōu)勢其實體現(xiàn)在動態(tài)精度上,車載通常更關(guān)注動態(tài)精度。
他們的產(chǎn)品已經(jīng)廣泛應(yīng)用于低速無人車、公交車等應(yīng)用中。其實對很多應(yīng)用來說,分米級別定位已經(jīng)足夠了,所以還是有很多的應(yīng)用場景的。
總之,我猜很多人應(yīng)該沒有聽過這個東西,所以在這里給大家分享一下,讓大家在選用定位終端時有更多選擇和比較。
編輯:lyn
-
GPS定位
+關(guān)注
關(guān)注
4文章
80瀏覽量
22505 -
定位
+關(guān)注
關(guān)注
5文章
1347瀏覽量
35502
原文標(biāo)題:什么是RAC定位?
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
EtherCAT通訊協(xié)議詳細(xì)解析
硅谷云平臺詳細(xì)解析
多c段站群服務(wù)器詳細(xì)解析
RE超標(biāo)之整機定位詳細(xì)流程
深度解析 4G模組GPIO編程技巧篇
TSMI252012PMX-3R3MT功率電感詳細(xì)解析
UWB技術(shù)如何實現(xiàn)不同維度的定位需求
自動售貨機MDB協(xié)議中文解析(七)MDB-RS232控制紙幣器的詳細(xì)流程和解析
緊急救援新利器:頂堅單北斗手持終端的精準(zhǔn)定位與快速響應(yīng)

IP地址定位與GPS定位:技術(shù)解析與應(yīng)用比較
隧道定位導(dǎo)航的解決方案
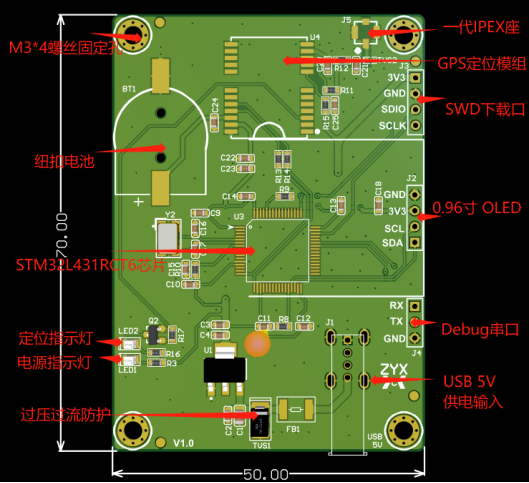
基于STM32的GPS定位儀
伺服電機絕對定位和相對定位問題

4G工牌室內(nèi)外定位系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論