1、產(chǎn)品概述
LDTR04plus是一款集成微帶天線,射頻電路及信號(hào)處理電路的雷達(dá)模塊,直接輸出目標(biāo)的速度信息。可用于大于150米的遠(yuǎn)距離汽車測(cè)速、采用集成射頻芯片,頻率穩(wěn)定度極高,測(cè)速精度達(dá)1KM/h。
2、模塊功能
頻率范圍:24.18GHz(可定制其他頻率)
調(diào)制方式:CW探測(cè)運(yùn)動(dòng)車輛大車>200米,小車>150米
支持RS485接口,UART232(3.3VTTL電平信號(hào))(波特率9600bps)
測(cè)速量程1Km/h-250Km/h
速度測(cè)量誤差小于±1Km/h(運(yùn)動(dòng)方向與雷達(dá)波束方位夾角為零度時(shí))
電壓:9-24V、電流:55mA@12V(英飛凌方案)
輸出功率(EIRP):20dBm(可調(diào)整)
天線角度:26°X13°
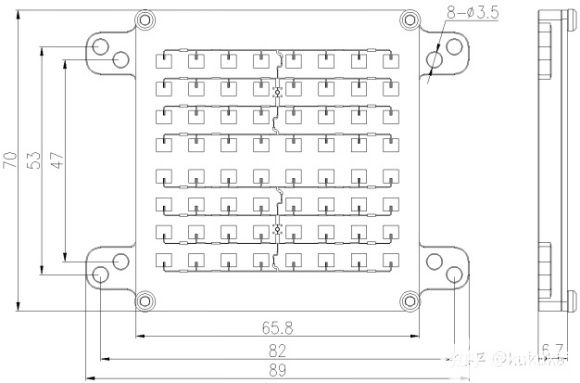
傳感器尺寸大小:70*89*6.7mm
4、性能指標(biāo)
供電電壓:最小值9V;標(biāo)準(zhǔn)值:12V;最大值24V
電流:最大55mA(12V測(cè)試條件)
工作溫度:最小值-20°C;最大值85°C
存儲(chǔ)溫度:最小值-40°C;最大值125°C
頻率范圍:24~24.24GHz
輻射功率EIRP:20dBm
發(fā)射天線增益:17dB
接收天線增益:17dB
發(fā)射天線輻射角度(3dB):(水平)±6.5deg;(垂直)±13deg
接收天線輻射角度(3dB):(水平)±6.5deg;(垂直)±13deg
5、接口信息
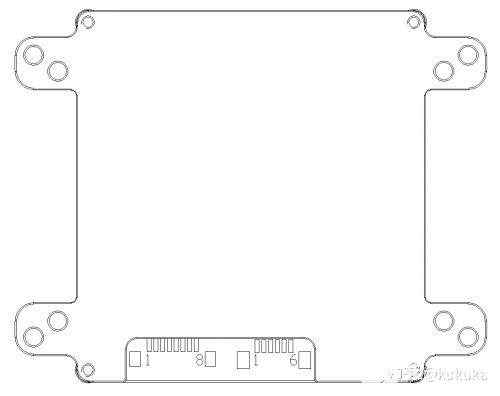

6、尺寸大小
7、.注意事項(xiàng)
本模塊不提供天線罩,需要客戶選用透波能力強(qiáng)的材料(PBT,PLA等)。天線面距離天線罩距離6.22mm以上。雷達(dá)發(fā)射方向如果有水、金屬等反射較強(qiáng)的遮擋物,會(huì)嚴(yán)重影響雷達(dá)測(cè)試效果。
審核編輯:符乾江
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
相關(guān)推薦
測(cè)速雷達(dá)與無(wú)人駕駛技術(shù)的結(jié)合 測(cè)速雷達(dá)作為無(wú)人駕駛汽車環(huán)境感知系統(tǒng)的核心技術(shù)之一,發(fā)揮著至關(guān)重要的作用。它通過(guò)發(fā)射無(wú)線電波并接收其反射信號(hào),能夠精確測(cè)量車輛的速度,并獲取周圍環(huán)境中其他物體的位置
![的頭像]() 發(fā)表于
發(fā)表于 12-05 17:18
?472次閱讀
測(cè)速雷達(dá)是一種利用電磁波(通常是微波或激光)來(lái)測(cè)量物體速度的設(shè)備。它廣泛應(yīng)用于交通監(jiān)控、航空、航海等領(lǐng)域。以下是測(cè)速雷達(dá)的基本工作原理: 發(fā)射信號(hào) :測(cè)速雷達(dá)發(fā)射一個(gè)連續(xù)的或脈沖的電磁
![的頭像]() 發(fā)表于
發(fā)表于 12-05 17:13
?586次閱讀
測(cè)速雷達(dá)是利用電磁波探測(cè)目標(biāo)的電子設(shè)備,它發(fā)射電磁波對(duì)目標(biāo)進(jìn)行照射并接收其回波,由此獲得目標(biāo)至電磁波發(fā)射點(diǎn)的距離、距離變化率(徑向速度)、方位、高度等信息。
![的頭像]() 發(fā)表于
發(fā)表于 12-05 17:11
?519次閱讀
1. 引言 毫米波雷達(dá)作為一種高精度的探測(cè)技術(shù),其信號(hào)的傳輸特性對(duì)于系統(tǒng)的性能至關(guān)重要。本文將探討毫米波雷達(dá)信號(hào)的傳輸特性,包括其傳播損耗、多徑效應(yīng)、雨衰等,并分析這些特性對(duì)
![的頭像]() 發(fā)表于
發(fā)表于 12-04 09:12
?569次閱讀
和應(yīng)用場(chǎng)景。 1. 工作原理 毫米波雷達(dá) (Millimeter Wave Radar,MMW)是一種使用毫米波頻段(30GHz至300GHz
![的頭像]() 發(fā)表于
發(fā)表于 12-03 17:37
?2335次閱讀
毫米波雷達(dá)工作原理 1. 毫米波雷達(dá)的基本結(jié)構(gòu) 毫米波雷達(dá)系統(tǒng)通常由以下幾個(gè)主要部分組成: 發(fā)射
![的頭像]() 發(fā)表于
發(fā)表于 12-03 17:21
?786次閱讀
一、什么是毫米波雷達(dá)毫米波雷達(dá)是一種非接觸型的傳感器,其工作頻率范圍涵蓋10毫米(30GHz)至
![的頭像]() 發(fā)表于
發(fā)表于 09-06 17:38
?1527次閱讀

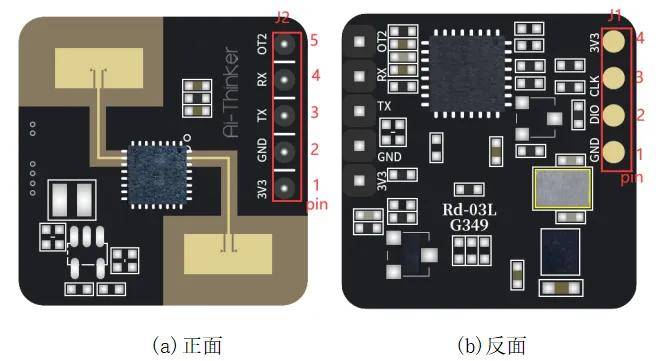
Rd-03L作為安信可雷達(dá)系列中一款超低功耗人體存在毫米波傳感器,包含極簡(jiǎn)化24 GHz雷達(dá)傳感器硬件和低功耗人體存在感應(yīng)智能算法固件。 外
![的頭像]() 發(fā)表于
發(fā)表于 09-05 10:31
?445次閱讀
雷達(dá)模組的痛點(diǎn)。 ME73MS01模塊介紹 ME73MS01采用24GHz毫米波雷達(dá)技術(shù),解決了
![的頭像]() 發(fā)表于
發(fā)表于 08-30 14:23
?581次閱讀

1硬件介紹1.1模塊介紹1.1.160GHz毫米波雷達(dá)模塊
![的頭像]() 發(fā)表于
發(fā)表于 08-30 13:12
?535次閱讀

毫米波雷達(dá)與超聲波雷達(dá)是兩種不同的雷達(dá)技術(shù),它們?cè)诠ぷ髟怼⑿阅芴攸c(diǎn)、應(yīng)用領(lǐng)域等方面存在一定的差異。以下是對(duì)這兩種雷達(dá)技術(shù)的
![的頭像]() 發(fā)表于
發(fā)表于 08-16 10:09
?3014次閱讀
進(jìn)行探測(cè)的雷達(dá)系統(tǒng)。毫米波的波長(zhǎng)范圍在1mm至10mm之間,頻率范圍在30GHz至300GHz之間。毫米波
![的頭像]() 發(fā)表于
發(fā)表于 08-16 10:07
?1628次閱讀
毫米波雷達(dá)是一種利用毫米波段電磁波進(jìn)行探測(cè)和測(cè)量的雷達(dá)系統(tǒng),具有高分辨率、高靈敏度、高抗干擾能力等特點(diǎn),在軍事、航空、航天、交通、氣象等領(lǐng)域
![的頭像]() 發(fā)表于
發(fā)表于 08-16 10:05
?2369次閱讀
精確地測(cè)量目標(biāo)的位置、速度和形狀。這使得毫米波雷達(dá)在許多領(lǐng)域,如軍事、航空航天、交通管理和氣象監(jiān)測(cè)等,具有重要的應(yīng)用價(jià)值。 高頻率:毫米波雷達(dá)的頻率范圍在30
![的頭像]() 發(fā)表于
發(fā)表于 08-16 10:04
?1838次閱讀
都能準(zhǔn)確識(shí)別,而且由于距離和車內(nèi)物品的干擾,模型的準(zhǔn)確性會(huì)很低[2]。此外,還開發(fā)了一種對(duì)手部精細(xì)動(dòng)態(tài)運(yùn)動(dòng)敏感的近距離緊湊型60GHz毫米波雷達(dá)傳感器。但這個(gè)模型只能在有限的輻射中使用[3]。因此
發(fā)表于 06-05 19:09
") 毫米波雷達(dá)測(cè)速運(yùn)用—24GHz測(cè)速雷達(dá)模塊的介紹
毫米波雷達(dá)測(cè)速運(yùn)用—24GHz測(cè)速雷達(dá)模塊的介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論