") ADAS和自動(dòng)駕駛需要雷達(dá)的理由
ADAS和自動(dòng)駕駛需要雷達(dá)的理由
通信和傳感技術(shù)已經(jīng)改變了汽車行業(yè)。越來越多的汽車包含與環(huán)境交互的功能和系統(tǒng),獲得對(duì)周圍空間的認(rèn)識(shí),相互之間和與基礎(chǔ)設(shè)施聯(lián)網(wǎng),以及檢測(cè)可能的危險(xiǎn)源。我們可以認(rèn)為車輛已經(jīng)獲得了自己的“感覺”:它們知道自己在哪里,現(xiàn)在可以看到、聽到和感覺到周圍發(fā)生的事情。
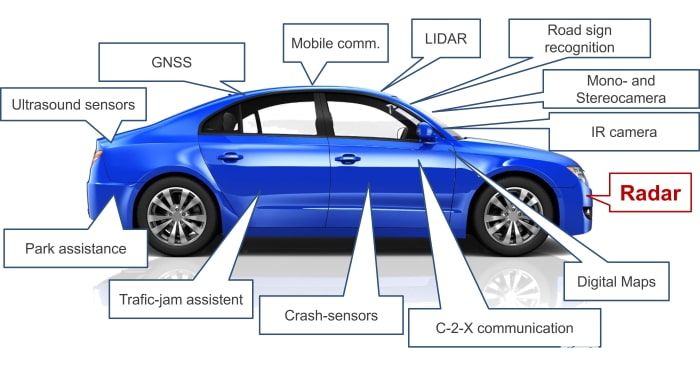
圖 1:傳感器、導(dǎo)航和通信:汽車的“感官”。
汽車傳感器是提高道路交通安全和達(dá)到自動(dòng)駕駛 4 級(jí)和 5 級(jí)的關(guān)鍵。使用先進(jìn)的傳感器技術(shù)將允許通過警告信號(hào)和自動(dòng)安全功能預(yù)防事故,從而實(shí)現(xiàn)愿景 0 目標(biāo):到 2050 年交通事故死亡人數(shù)為零。從這個(gè)意義上說,歐洲議會(huì)于 2019 年批準(zhǔn)了一項(xiàng)法律,制定了安全功能,例如從 2022 年 5 月起,新車型和 2024 年 5 月起,所有新車都必須配備智能速度輔助、先進(jìn)的緊急制動(dòng)系統(tǒng)和車道保持系統(tǒng)。
此外,購(gòu)買汽車時(shí),安全措施也變得越來越重要。出于這個(gè)原因,歐洲新車評(píng)估計(jì)劃 (Euro NCAP) 將自 2020 年以來的緊急制動(dòng)系統(tǒng)納入其評(píng)估。這迫使該行業(yè)加大努力,并在其車輛中加入新的檢測(cè)功能。
1. 用于 ADAS/AS 的汽車傳感器
有不同的選項(xiàng)可用于感測(cè)車輛周圍的環(huán)境。然而,對(duì)于完全自動(dòng)駕駛,需要結(jié)合不同的傳感技術(shù),才能提供完整的 360° 檢測(cè)。整個(gè)系統(tǒng)可以看作是汽車的“感官”,提供與周圍環(huán)境互動(dòng)的手段,并創(chuàng)造一個(gè)安全“繭”。每種技術(shù)都有其優(yōu)點(diǎn)和缺點(diǎn),如下表 1 所示,因此完全自動(dòng)駕駛需要結(jié)合不同的來源,如圖 2 所示。
表 1:汽車應(yīng)用中不同傳感器技術(shù)的優(yōu)缺點(diǎn)

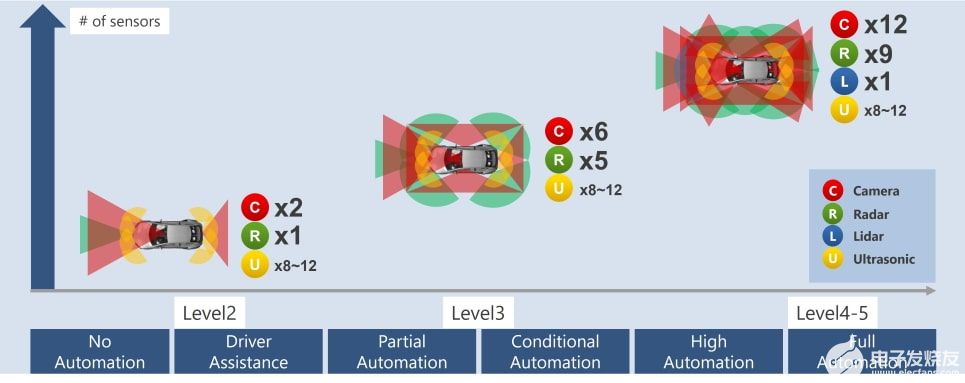
圖 2:ADAS/AD 系統(tǒng)趨勢(shì):傳感器集成。
2、汽車?yán)走_(dá)
雷達(dá)是一項(xiàng)眾所周知的技術(shù),它依靠發(fā)送和接收電磁波來測(cè)量、檢測(cè)和定位環(huán)境中的障礙物。雷達(dá)特別適用于汽車應(yīng)用,因?yàn)檐囕v是電磁波的良好反射器,因此可以準(zhǔn)確地確定它們的距離、位置和速度。
在汽車環(huán)境中,調(diào)頻連續(xù)波 (FMCW) 雷達(dá)用于不同的頻段,具體取決于應(yīng)用。FMCW雷達(dá)的原理將在下一篇雷達(dá)博文中講解。雷達(dá)的基本拓?fù)淙鐖D 3 所示。它包括一個(gè)或多個(gè)雷達(dá) MMIC 收發(fā)器,連接到高性能處理單元(MCU 或 SoC)。拓?fù)浣Y(jié)構(gòu)和芯片數(shù)量將取決于雷達(dá)模塊在車輛上的位置及其必須覆蓋的應(yīng)用,如圖 4 所示。
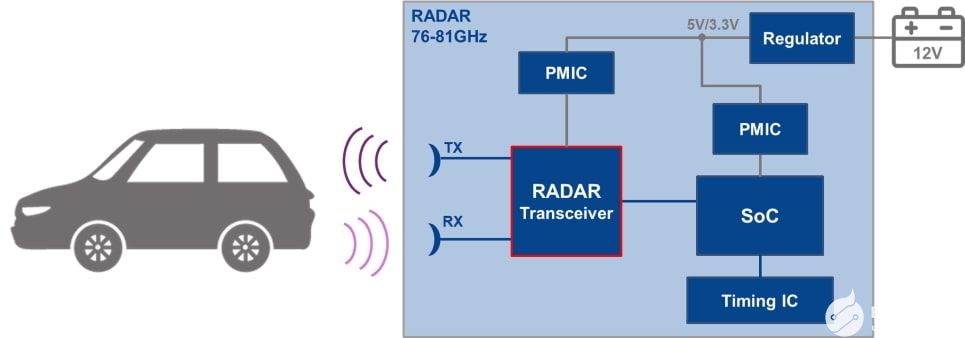
圖 3:雷達(dá)架構(gòu)示例
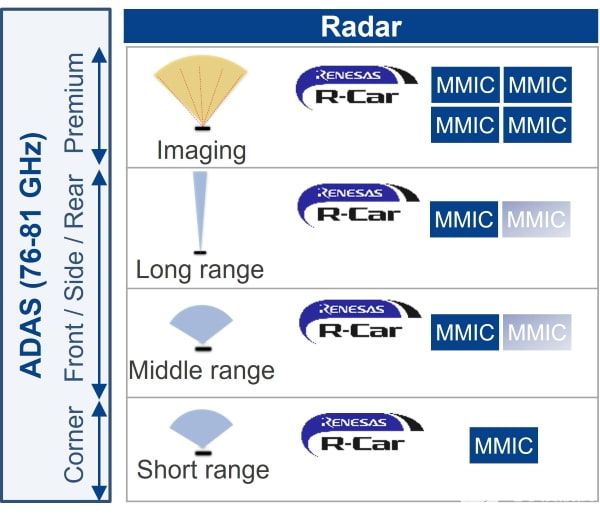
圖 4:不同雷達(dá)應(yīng)用的組合。
國(guó)際電信聯(lián)盟 (ITU) 根據(jù)其功能定義了兩類汽車?yán)走_(dá)系統(tǒng):
類別 1:它包括為駕駛員提供舒適功能的雷達(dá)系統(tǒng),使駕駛更加輕松。此類別包括自適應(yīng)巡航控制 (ACC) 和防撞 (CA) 雷達(dá),測(cè)量范圍可達(dá) 250 米。
2 類:它定義了用于高分辨率應(yīng)用的傳感器,這些傳感器增加了車輛的被動(dòng)和主動(dòng)安全性,例如盲點(diǎn)檢測(cè)、車道變換輔助和后方交通交叉警報(bào)、行人和自行車附近的檢測(cè)車輛。范圍低于 1 類,最大為 50m 至 100m,具體取決于應(yīng)用。這些系統(tǒng)的目的是通過提高車輛的被動(dòng)和主動(dòng)安全性來改善交通安全。
雷達(dá)的類型也可以根據(jù)測(cè)量范圍進(jìn)行分類(圖 5):
短程雷達(dá) (SRR),具有大視場(chǎng)和高分辨率,范圍可達(dá) 50 m。
中程雷達(dá) (MRR),具有中等視野,范圍可達(dá) 100 m,
遠(yuǎn)程雷達(dá) (LRR),它不需要高分辨率或?qū)捯晥?chǎng),但目標(biāo)是盡可能高的范圍,高達(dá) 250m。
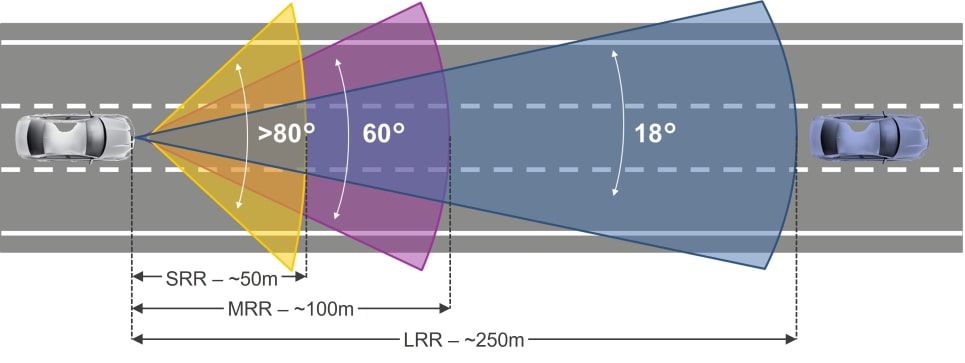
圖 5:汽車?yán)走_(dá)的典型范圍和視場(chǎng)。
為了提供 360° 覆蓋,需要在汽車上放置具有不同功能的不同雷達(dá)傳感器,如圖 6 所示。必須將獲取的數(shù)據(jù)結(jié)合起來,以獲得實(shí)時(shí)準(zhǔn)確的周圍環(huán)境信息。
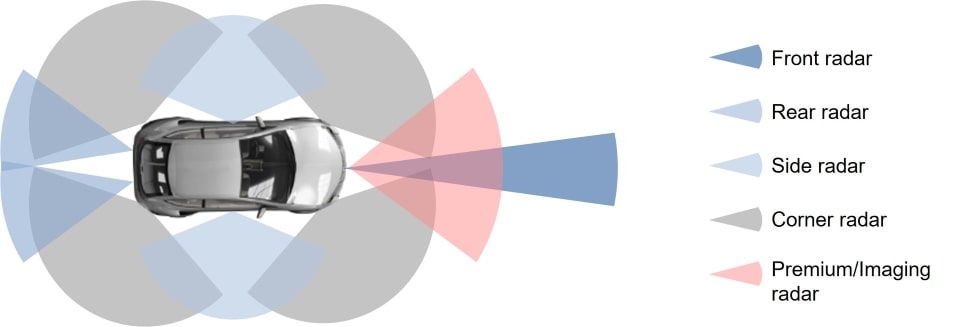
圖 6:在汽車上放置雷達(dá)傳感器以實(shí)現(xiàn) 360° 覆蓋。
雷達(dá)傳感器可以很容易地安裝在汽車的常見元素后面,比如保險(xiǎn)杠或公司標(biāo)志,這樣它們就看不見了,不影響美觀。隨著工作頻率的提高,這種集成變得更容易,因?yàn)闆Q定模塊尺寸的天線尺寸與波長(zhǎng)成線性比例,因此與工作頻率成反比。汽車?yán)走_(dá)系統(tǒng)曾經(jīng)使用四個(gè)主要頻段,兩個(gè)在 K 波段(大約 24GHz)和兩個(gè)在 E 波段(在 76 和 81GHz 之間),如圖 7 所示。
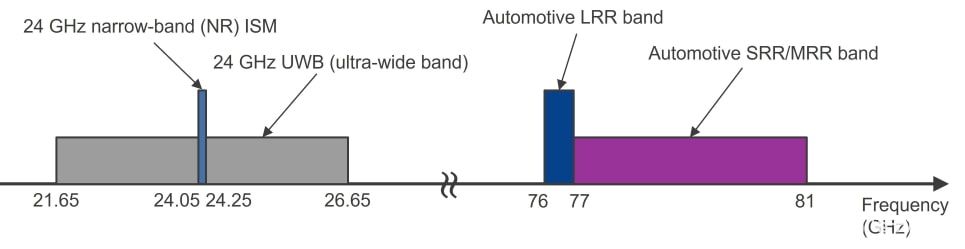
圖 7:汽車?yán)走_(dá)的頻段。
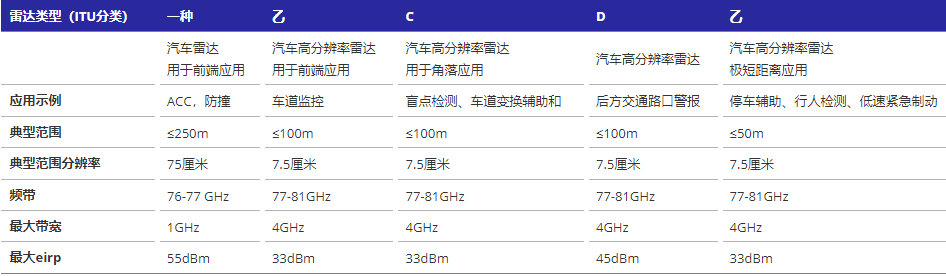
然而,由于對(duì)射電天文和地球探測(cè)應(yīng)用的干擾,24GHz 頻段將被停用。作為替代方案,76 GHz 至 81 GHz 頻段已被大多數(shù)國(guó)家接受為汽車?yán)走_(dá)的頻段。在那里,為 LRR(76 至 77GHz)保留 1GHz 帶寬,而 4GHz 帶寬可用于需要更高分辨率的應(yīng)用,如表 2 所示。
表 2:根據(jù) ITU 建議 ITU-R M.2057-0 在 76-81 GHz 頻段內(nèi)的典型汽車?yán)走_(dá)特性
3.雷達(dá)市場(chǎng)
新車輛中新的安全和舒適功能的集成導(dǎo)致雷達(dá)市場(chǎng)激增。汽車是該市場(chǎng)增長(zhǎng)最快的部分,預(yù)計(jì)到 2025 年將超過 100 億美元,如圖 8 所示。
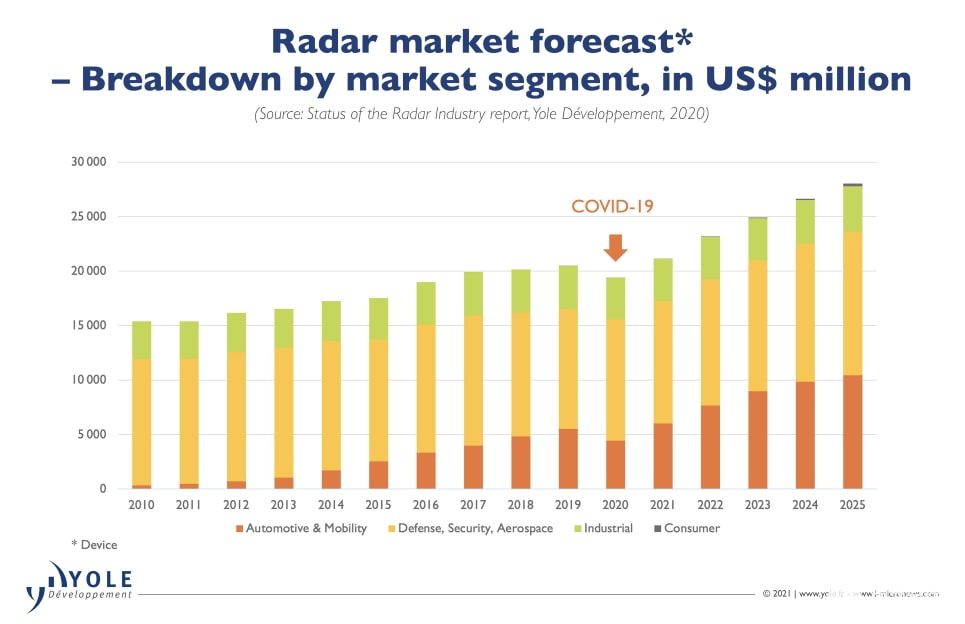
圖 8:雷達(dá)市場(chǎng)的演變(來源:Yole Report 2020)
如果僅考慮雷達(dá) MMIC 收發(fā)器,市場(chǎng)預(yù)測(cè)超過 12 億美元,GaAs 技術(shù)幾乎消失,CMOS 將快速增長(zhǎng),到 2025 年成為主導(dǎo)技術(shù)。
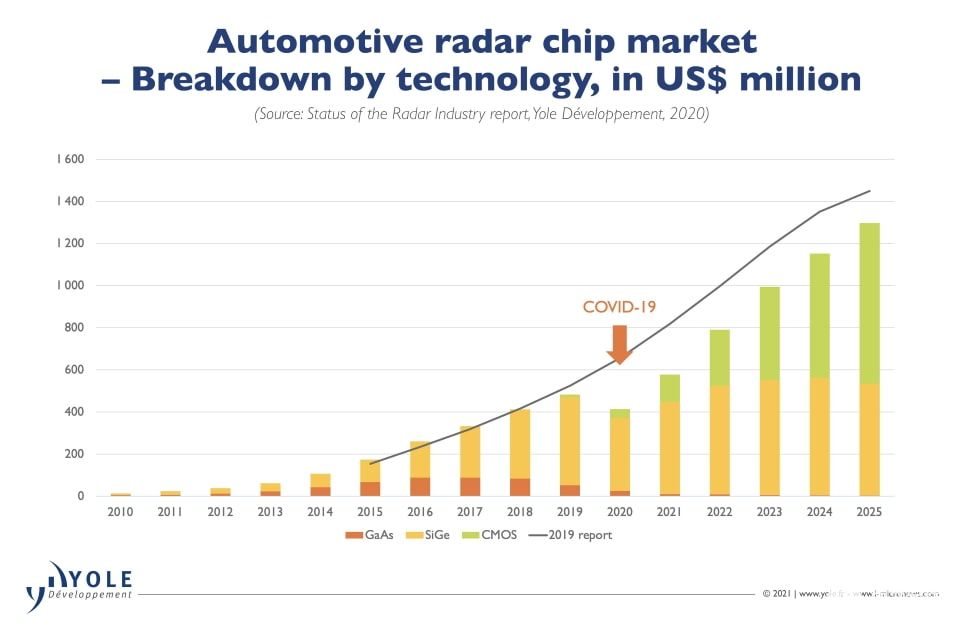
圖 9:每種技術(shù)的雷達(dá) MMIC 市場(chǎng)的演變(來源:Yole Report 2020)
4。結(jié)論
雷達(dá)模塊已成為現(xiàn)代車輛的標(biāo)準(zhǔn)配置。雖然它們?cè)诰嚯x分辨率方面相對(duì)于其他技術(shù)存在一些缺點(diǎn),但它們的可靠性和多功能性使其成為現(xiàn)代 ADAS/AD 系統(tǒng)中不可替代的部分。從 76 GHz 到 81 GHz 向更高頻率的轉(zhuǎn)變帶來了新的技術(shù)挑戰(zhàn),但這也使其成為半導(dǎo)體行業(yè)新發(fā)展的激動(dòng)人心的領(lǐng)域。
審核編輯:郭婷
-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3454瀏覽量
106244 -
半導(dǎo)體
+關(guān)注
關(guān)注
334文章
27709瀏覽量
222645 -
分辨率
+關(guān)注
關(guān)注
2文章
1072瀏覽量
42038
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

什么是自動(dòng)駕駛場(chǎng)景仿真軟件——VTD(Virtial Test Drive)?#ADAS #智能駕駛


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

MXeval操作與評(píng)估結(jié)果展示#MXeval #主觀評(píng)估 #ADAS #自動(dòng)駕駛

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛仿真測(cè)試技術(shù)面臨的挑戰(zhàn)#ADAS #智能駕駛 #VTHiL
聊聊自動(dòng)駕駛離不開的感知硬件
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
揭秘自動(dòng)駕駛:未來汽車的感官革命,究竟需要哪些超級(jí)傳感器?
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論