") 旋翼無(wú)人機(jī)的技術(shù)組成及應(yīng)用現(xiàn)狀
旋翼無(wú)人機(jī)的技術(shù)組成及應(yīng)用現(xiàn)狀
1旋翼無(wú)人機(jī)的應(yīng)用
1.1 旋翼無(wú)人機(jī)的技術(shù)組成
旋翼無(wú)人機(jī)是一個(gè)整體的系統(tǒng),由無(wú)人機(jī)機(jī)體本身、任務(wù)載荷和地面通信基站共同組成,旋翼無(wú)人機(jī)的任務(wù)載荷可以根據(jù)實(shí)際需要來(lái)進(jìn)行更換。而地面通信基站是整個(gè)系統(tǒng)的控制中心,決定著無(wú)人機(jī)的運(yùn)行,可以有效控制無(wú)人機(jī)的飛行路線和做好數(shù)據(jù)采集工作。旋 翼無(wú)人機(jī)主要應(yīng)用的技術(shù)有無(wú)線通信技術(shù)、GPS導(dǎo)航技術(shù)、傳感器技術(shù)和軟件技術(shù)。
1.2國(guó)內(nèi)外旋翼無(wú)人機(jī)應(yīng)用現(xiàn)狀
旋翼無(wú)人機(jī)在國(guó)外發(fā)達(dá)國(guó)家的應(yīng)用較廣,美國(guó)通過(guò)先進(jìn)的自動(dòng)導(dǎo)航和精密控制技術(shù)對(duì)旋翼無(wú)人機(jī)進(jìn)行廣泛應(yīng)用,使得農(nóng)業(yè)生產(chǎn)效率大幅上升;日本也大量應(yīng)用旋翼無(wú)人機(jī)進(jìn)行植物保護(hù)作業(yè),目前,已經(jīng)形成了極為完善的一套操作流程和規(guī)范;相比之下,我國(guó)旋翼無(wú)人機(jī)的研究和應(yīng)用起步較晚,但發(fā)展速度較快,當(dāng)前,我國(guó)旋翼無(wú)人機(jī)的研究進(jìn)入了新的階段,已在低空高光譜遙感技術(shù)方面得到了廣泛應(yīng)用。
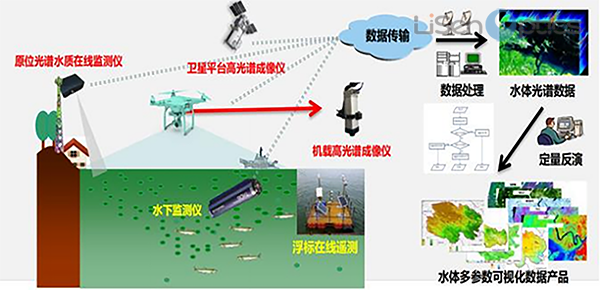
2高光譜遙感技術(shù)的應(yīng)用
高光譜遙感技術(shù)主要用來(lái)監(jiān)測(cè)地面農(nóng)作物的生長(zhǎng)狀態(tài),把所得到的信息進(jìn)行整合,以及時(shí)提供有效的信息,同時(shí),這項(xiàng)技術(shù)對(duì)于預(yù)測(cè)災(zāi)害方面也十分有效,這項(xiàng)技術(shù)的應(yīng)用可以有效提高農(nóng)業(yè)管理水平和減少農(nóng)業(yè)管理成本。從應(yīng)用方向上看,高光譜遙感技術(shù)主要應(yīng)用于以下三個(gè)方面:一是,研究農(nóng)作物葉片光譜特征,通過(guò)對(duì)葉片光譜特征的研究,對(duì)土壤內(nèi)水分含量、農(nóng)作物葉片葉綠素含量等進(jìn)行分析,從而為農(nóng)技人員優(yōu)化作物種植管理方案提供參考;二是,能夠預(yù)測(cè)農(nóng)作物的生長(zhǎng)勢(shì)頭,高光譜遙感技術(shù)能夠?qū)θ~面積指數(shù)和生物量?jī)蓚€(gè)方面進(jìn)行監(jiān)測(cè),而且這項(xiàng)技術(shù)對(duì)葉片沒有破壞性,可以得 到精確的葉面積指數(shù),在此基礎(chǔ)上,通過(guò)搭建葉面積指數(shù)反演模型,來(lái)對(duì)農(nóng)作物的長(zhǎng)勢(shì)進(jìn)行預(yù)測(cè);三是,能夠監(jiān)測(cè)農(nóng)作物的生理性狀,重點(diǎn)是對(duì)農(nóng)作物的光合作用和氮含量進(jìn)行監(jiān)測(cè),通過(guò)監(jiān)測(cè)農(nóng)作物的光合作用狀態(tài)可以預(yù)測(cè)農(nóng)作物的生理狀況,而對(duì)氮含量的監(jiān)測(cè),可以為施肥提供參考,實(shí)現(xiàn)科學(xué)、合理的施肥,避免浪費(fèi)肥料,確保農(nóng)作物健康生長(zhǎng)。
3高光譜遙感技術(shù)分析
3.1高光譜遙感圖像采集過(guò)程
高光譜遙感圖像的采集的通過(guò)旋翼無(wú)人機(jī)平臺(tái)來(lái)實(shí)現(xiàn),在采集過(guò)程中,要注意對(duì)無(wú)人機(jī)平臺(tái)的飛行參數(shù)和飛行線路進(jìn)行科學(xué)的規(guī)劃,同時(shí)對(duì)拍攝參數(shù)也需要進(jìn)行精細(xì)控制。通常來(lái)講,采集方式都是定點(diǎn)采集,即無(wú)人機(jī)到達(dá)預(yù)設(shè)地點(diǎn)之時(shí)向相機(jī)發(fā)出拍攝指令,這種做法可以使圖像重疊率得到有效保證,從而提高采集效率并獲得高質(zhì)量的采集圖像。高光譜遙感圖像采集過(guò)程主要分為以下四步:第一步是無(wú)人機(jī)平臺(tái)的飛行參數(shù)確定,主要包括無(wú)人機(jī)平臺(tái)的飛行高度、飛行速度和圖像重疊率。在確定參數(shù)時(shí),要注意這些參數(shù)不是互相獨(dú)立的,而是互相影響的,因此,需要結(jié)合任務(wù)實(shí)際需求和設(shè)備本身性能來(lái)綜合考量。實(shí)際應(yīng)用中,要最先確定重疊率以保證圖像精度,然后根據(jù)分辨率確定飛行高度,最后根據(jù)相機(jī)的頻率確定速度。第二步是飛行路線規(guī)劃,飛行路線是根據(jù)飛行參數(shù)所確定的,在日常應(yīng)用中,多采取“之”字形的飛行路線,這樣可以對(duì)農(nóng)田區(qū)域進(jìn)行較為全面的拍攝,做到不留死角。第三步是對(duì)相機(jī)的參數(shù)確定,主要是確定相機(jī)焦距、曝光時(shí)間等。焦距決定著圖像采集的清晰度,在確定焦距過(guò)程當(dāng)中,不建議采取自動(dòng)對(duì)焦模式,因?yàn)檫@會(huì)使得圖像拍攝時(shí)間變長(zhǎng),從而出現(xiàn)丟圖現(xiàn)象;曝光時(shí)間也要嚴(yán)格確定好,曝光時(shí)間過(guò)長(zhǎng)會(huì)損失一部分遙感信 息,曝光時(shí)間過(guò)短會(huì)使得圖像信噪比降低。在選取參數(shù)時(shí),要注意到各參數(shù)之間的相互影響,而找到一個(gè)平衡點(diǎn)。并且,采集過(guò)程對(duì)環(huán)境的光照度也有一定要求,因此,原則上應(yīng)當(dāng)在正午前后的兩小時(shí)范圍內(nèi)進(jìn)行高光譜遙感圖像的采集工作。最后一步是遙感圖像的采集工作,這一環(huán)節(jié)相對(duì)簡(jiǎn)單,只需要將相機(jī)鏡頭調(diào)節(jié)到豎直向下的位置,圖像采集工作即可在無(wú)人機(jī)飛行過(guò)程中自動(dòng)進(jìn)行。
萊森光學(xué)(深圳)有限公司是一家提供光機(jī)電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應(yīng)用系統(tǒng)的研發(fā)、生產(chǎn)和銷售。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756578 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10515瀏覽量
182407 -
光譜遙感
+關(guān)注
關(guān)注
0文章
10瀏覽量
7107
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
無(wú)人機(jī)飛行控制器的組成部件和工作原理

為何無(wú)人機(jī)領(lǐng)域廣泛采用PX4作為核心控制平臺(tái)

無(wú)人機(jī)機(jī)載高光譜成像系統(tǒng)的應(yīng)用及優(yōu)勢(shì)
無(wú)人機(jī)信號(hào)傳輸技術(shù)的原理及分類
開源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無(wú)人機(jī)
反無(wú)人機(jī)系統(tǒng)發(fā)展現(xiàn)狀:應(yīng)對(duì)無(wú)人機(jī)入侵威脅的利器|特信電子
無(wú)人機(jī)遭遇“神秘殺手”:揭秘反無(wú)人機(jī)技術(shù)的崛起






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論