") 巨磁阻傳感的三種應(yīng)用模式Sisyphus
巨磁阻傳感的三種應(yīng)用模式Sisyphus
磁傳感器在很多領(lǐng)域都有著重要作用,作為一類(lèi)大家熟知的傳感器類(lèi)型,縱觀磁傳感器的發(fā)展,可以分為以下幾個(gè)階段,從霍爾效應(yīng)的磁傳感器,到各向異性磁阻效應(yīng)的AMR磁傳感器,到基于巨磁電阻的GMR磁傳感器,再到基于隧道磁阻的TMR磁傳感器。
巨磁阻效應(yīng)是指磁性材料的電阻率在有外磁場(chǎng)作用時(shí)較之無(wú)外磁場(chǎng)作用時(shí)存在巨大變化的現(xiàn)象。簡(jiǎn)單來(lái)說(shuō)如果某種條件下物質(zhì)在磁場(chǎng)中電阻率減小的幅度非常大,就稱(chēng)為巨磁阻效應(yīng)。GMR傳感一般也采用橋式構(gòu)造,功耗、響應(yīng)時(shí)間、溫漂等傳感指標(biāo)和AMR傳感較為相近,但是磁電阻比會(huì)比AMR大很多,其磁電阻比ΔR/Rmin一般在15%左右。GMR因?yàn)楦叩募夹g(shù)門(mén)檻,比基于霍爾效應(yīng)的磁傳感以及基于各向異性磁阻效應(yīng)的AMR磁傳感更少見(jiàn)。
模擬輸出式GMR角度傳感應(yīng)用
角度傳感一直是磁性傳感器的重要應(yīng)用方向,從低端到高端,從標(biāo)準(zhǔn)化到專(zhuān)用于汽車(chē)、工業(yè)和消費(fèi)類(lèi),GMR在其中都有很好的應(yīng)用場(chǎng)景。角度傳感器通過(guò)使用單片集成磁阻元件測(cè)量正弦和余弦角分量來(lái)檢測(cè)施加磁場(chǎng)的方向。GMR傳感器非常適合具有寬角度范圍的應(yīng)用,例如無(wú)刷直流電機(jī)或轉(zhuǎn)向傳感器。經(jīng)過(guò)預(yù)先校準(zhǔn),GMR傳感可以立即使用,不同級(jí)別的信號(hào)處理集成使設(shè)計(jì)人員能夠優(yōu)化系統(tǒng)分區(qū)。
GMR角度傳感器在高溫下能否保持穩(wěn)定是應(yīng)用中常遇到一類(lèi)問(wèn)題,電機(jī)高溫環(huán)境會(huì)導(dǎo)致磁石的磁場(chǎng)強(qiáng)度下降,從而導(dǎo)致傳感器輸出幅值下降。如果角度計(jì)算依靠幅值,幅值隨溫度變化而變化后,必然會(huì)影響角度精度。模擬輸出式的GMR角度傳感器可以計(jì)算通過(guò)振幅的比值Sin÷Cos來(lái)測(cè)算,那么即使高溫下的傳感器輸出幅值下降,但是振幅的比值幾乎不受溫度影響,計(jì)算后的角度精度也不會(huì)受到影響。
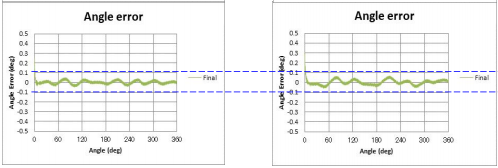
(角度精度不隨溫度變化,ALPSALPINE)
校正計(jì)算后的角度誤差和溫度變化帶來(lái)的磁場(chǎng)強(qiáng)度變化無(wú)關(guān),能夠很好地適用于高溫環(huán)境下的角度應(yīng)用。
另一方面,高溫兼強(qiáng)磁場(chǎng)工況可能會(huì)對(duì)器件產(chǎn)生額外的影響。強(qiáng)磁場(chǎng)在角度傳感器的45deg方向施加壓力,導(dǎo)致固定層的磁化方向產(chǎn)生反方向不可逆的變化,輸出相位差變差導(dǎo)致角度精度變差。

(GMR,英飛凌)
上面說(shuō)到,模擬輸出式的GMR角度傳感器正弦和余弦角度分量來(lái)檢測(cè)磁場(chǎng)方向,深耕GMR技術(shù)的廠商會(huì)在模擬輸出式GMR傳感的在固定層上做強(qiáng)化設(shè)計(jì),減少正余弦路的相位差,增強(qiáng)對(duì)磁場(chǎng)壓力的耐受性,在發(fā)動(dòng)機(jī),電驅(qū)動(dòng)系統(tǒng)附近等高溫環(huán)境必須使用超強(qiáng)磁場(chǎng)的工作磁石情況下,可以明顯增強(qiáng)對(duì)外部雜散磁場(chǎng)的容忍度。另外,模擬輸出式傳感器和磁石之間相對(duì)位置更自由,可以增加機(jī)械設(shè)計(jì)的靈活性。
開(kāi)關(guān)式GMR檢測(cè)
在高精度ON/OFF檢測(cè)上,開(kāi)關(guān)式GMR常與霍爾傳感器來(lái)比較。我們以電子鎖應(yīng)用為例,比較二者在ON/OFF磁滯以及偏移位置最大偏差,GMR在ON/OFF磁滯上大致在0.15mm,霍爾傳感器大概在0.5mm,偏移位置最大偏差相差得會(huì)更多一些,GMR在0.4mm左右,霍爾傳感器則為3.7mm。
GMR傳感器在開(kāi)關(guān)式輸出檢測(cè)上,靈敏度偏差更小一些,即便工作磁石磁場(chǎng)的變化梯度很陡峭,GMR也能完成高精度的運(yùn)動(dòng)位置檢測(cè)。同時(shí),機(jī)械開(kāi)關(guān)產(chǎn)生的觸點(diǎn)故障在高精度ON/OFF檢測(cè)中也總是為人詬病,GMR傳感更遠(yuǎn)的檢測(cè)距離能夠用于設(shè)計(jì)非接觸式開(kāi)關(guān),對(duì)于磨損和顫動(dòng)導(dǎo)致的接觸不良也能起到作用。
磁編碼器式GMR的高速檢測(cè)
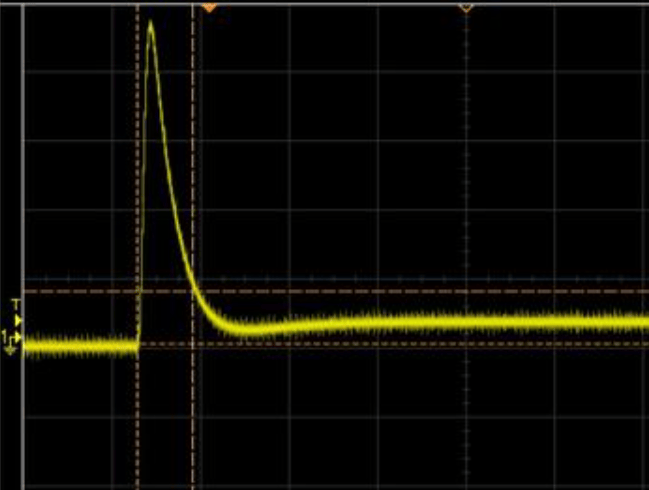
在高速檢測(cè)中,如果傳感器輸出響應(yīng)速度慢,會(huì)導(dǎo)致50%占空比無(wú)法實(shí)現(xiàn);50%占空比出現(xiàn)偏差,轉(zhuǎn)速計(jì)算和旋轉(zhuǎn)方向檢測(cè)也會(huì)由于時(shí)序錯(cuò)配導(dǎo)致檢測(cè)精度惡化。如果僅從傳感器的層面考慮,GMR響應(yīng)速度是足夠的。
頻率上即便到100KHz,GMR Encoder仍然可以保持50%占空比的輸出。在常規(guī)的10KHz(4極磁石且轉(zhuǎn)速為100krpm)中,GMR可以保留充足的響應(yīng)速度余量。在高速旋轉(zhuǎn)檢測(cè)中,輸出響應(yīng)速度無(wú)疑有很好的表現(xiàn)。當(dāng)然,在高速旋轉(zhuǎn)檢測(cè)中,也必須重點(diǎn)考慮信號(hào)處理芯片以及電子回路的響應(yīng)速度。
小結(jié)
這三種GMR傳感應(yīng)用,開(kāi)關(guān)式GMR因其檢測(cè)距離遠(yuǎn)以及低磁滯帶來(lái)的高精度,非常適合消費(fèi)電子、白電等領(lǐng)域;編碼器式GMR在各種惡劣環(huán)境下都能保持50%占空比以及90°的A/B相位差,在電機(jī)的高精度轉(zhuǎn)速檢測(cè)上效果突出;模擬輸出式GMR則特別適用于高溫強(qiáng)磁場(chǎng)場(chǎng)合,利于更靈活的機(jī)械設(shè)計(jì)。
-
應(yīng)用
+關(guān)注
關(guān)注
2文章
439瀏覽量
34222 -
巨磁阻
+關(guān)注
關(guān)注
0文章
8瀏覽量
9845 -
GMR
+關(guān)注
關(guān)注
1文章
31瀏覽量
11337
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
示波器的三種觸發(fā)模式
什么是PID調(diào)節(jié)器的三種模式
mosfet的三種工作狀態(tài)及工作條件是什么
單片機(jī)的三種總線結(jié)構(gòu)
vim的三種工作模式有哪些
vim的三種工作模式是什么?如何切換
放大電路的三種組態(tài)可以放大什么
ESP32的Station模式SoftAP模式BLE模式,三種模式可以共存嗎?
abb工業(yè)機(jī)器人手動(dòng)操作有哪三種模式?
伺服電機(jī)常用的三種控制模式有哪些
晶體管的三種工作狀態(tài)
555集成芯片的三種工作模式及區(qū)別
磁阻效應(yīng)傳感器的工作原理
動(dòng)態(tài)無(wú)功補(bǔ)償裝置的三種運(yùn)行模式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論