 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
第一步:問“為什么?”
沒有逃避它。在一年中的大部分時(shí)間里,加拿大都會遭受極度寒冷和強(qiáng)降雪。許多人從事的是城市低端工人操作除雪設(shè)備的工作。與此同時(shí),房主的任務(wù)是自己鏟土、支付服務(wù)費(fèi)用或依賴鄰居,這在任何情況下都會導(dǎo)致花費(fèi)大量時(shí)間和受傷風(fēng)險(xiǎn),尤其是對老年人而言。
我們相信,我們可以更好地利用我們可用的人工智能,并通過自動(dòng)化加拿大的除雪過程來改善人們的生活。
我們沒有憑空制造自動(dòng)掃雪機(jī)。首先,我們利用我們的電子和軟件知識構(gòu)建了小型工作原型,我們將從中學(xué)習(xí)并將其應(yīng)用到我們的全尺寸產(chǎn)品中。
第 2 步:繪制大圖
簡而言之,我們的設(shè)計(jì)分為四個(gè)階段:
1) 安全——我們?nèi)绾晤A(yù)防緊急情況并實(shí)施故障保險(xiǎn)?
2) 機(jī)械和建筑——我們要怎么做?
3) 電機(jī)控制——我們?nèi)绾慰刂齐姍C(jī)?
4) 同時(shí)定位和路徑導(dǎo)航——它如何知道它在哪里以及要去哪里?
第一階段 - 安全
至于安全措施,我們希望確保有三種機(jī)制可以在緊急情況下關(guān)閉掃雪機(jī):
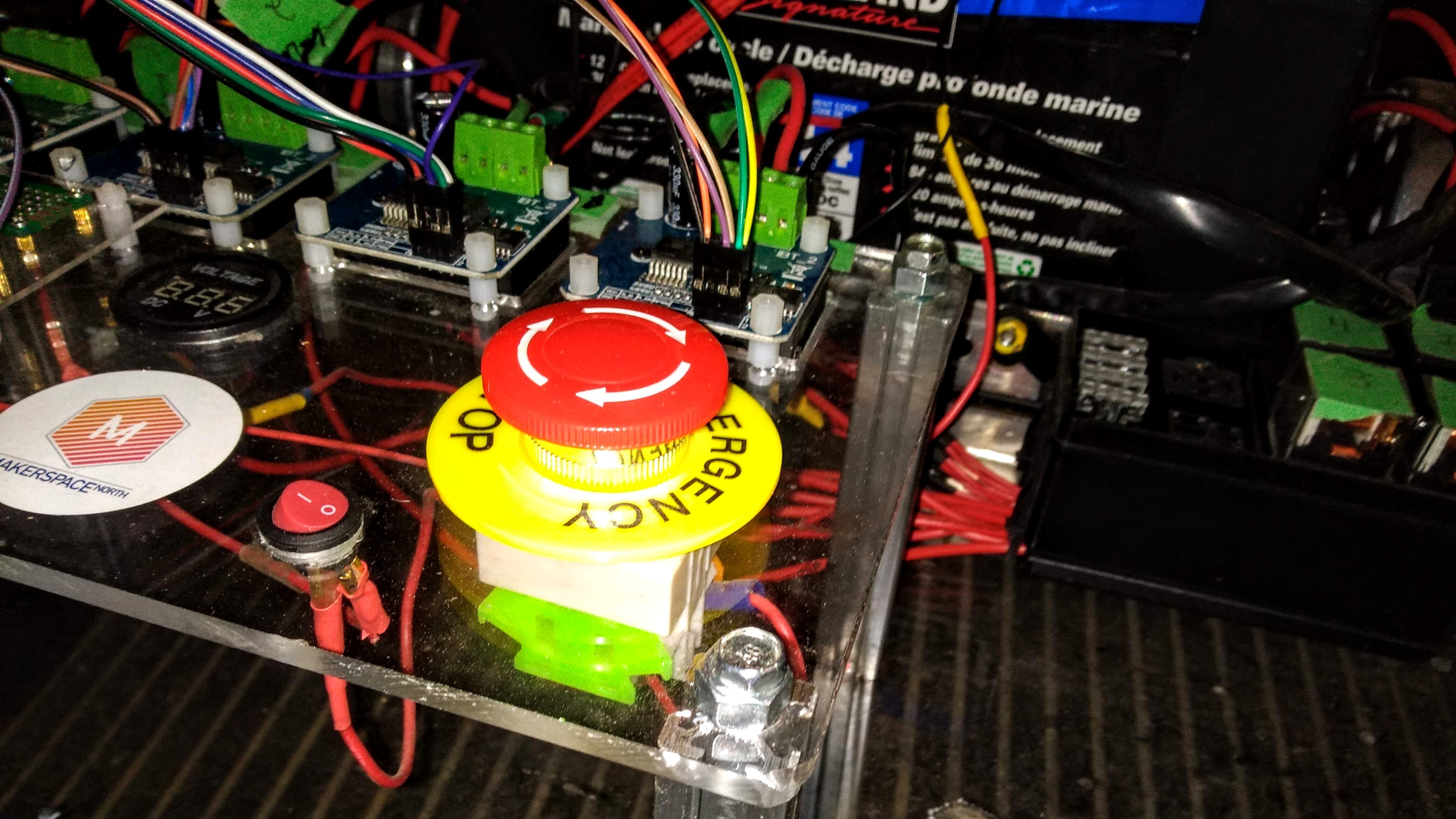
1) 通過急停按鈕機(jī)械關(guān)閉
2) 監(jiān)控系統(tǒng)的人員遠(yuǎn)程關(guān)閉
3) 如果系統(tǒng)檢測到需要關(guān)閉軟件的情況
第 2 階段 - 機(jī)械設(shè)計(jì)和組裝
費(fèi)用說明:
當(dāng)我們最初構(gòu)思這個(gè)項(xiàng)目時(shí),我們希望在不做出不必要的犧牲的情況下盡可能降低成本。我們的贊助商問我們的自動(dòng)掃雪機(jī)要花多少錢,我們口頭估計(jì)“稅后 2000-3000加元(或大約 2000 美元)”。
我們希望我們的掃雪機(jī)性能良好且具有成本效益。因此,雖然大部分項(xiàng)目材料來自加拿大,但我們也從美國、中國和臺灣采購零件。
有關(guān)項(xiàng)目成本的明細(xì),請參見此處。
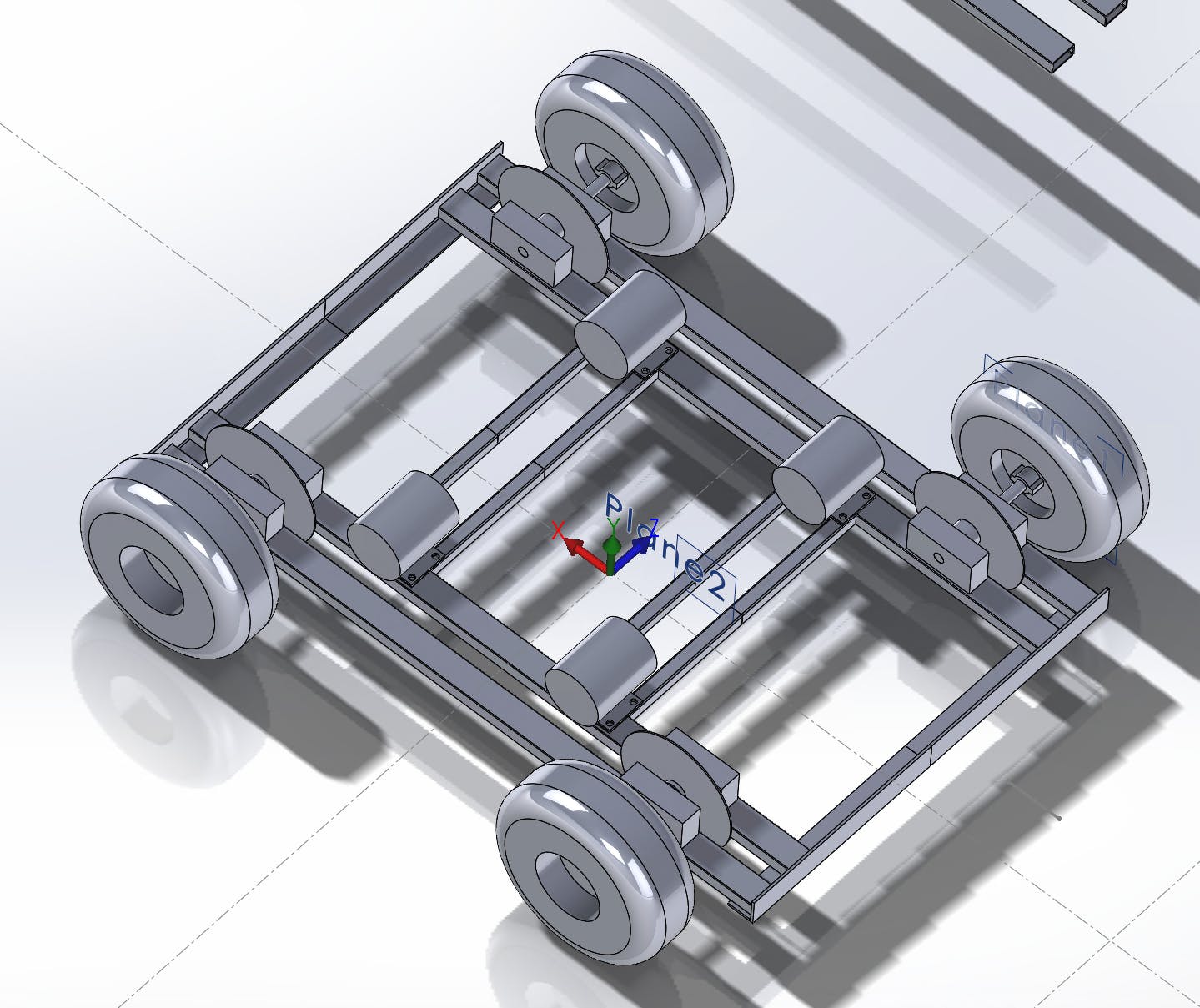
框架概念:
我們想設(shè)計(jì)一個(gè)簡單、堅(jiān)固、易于構(gòu)建、具有成本效益且可調(diào)節(jié)的框架。首先,我們知道我們的框架需要支撐電機(jī)以及很大的重量(這是掃雪機(jī)獲得足夠牽引力所必需的)。
動(dòng)力傳動(dòng)系統(tǒng)概念:固定齒輪自行車(四倍)
在決定我們的掃雪機(jī)的最佳動(dòng)力傳動(dòng)系統(tǒng)時(shí),我們從可追溯到 1800 年代的設(shè)計(jì)中汲取了靈感:固定齒輪自行車。
我們的動(dòng)力傳動(dòng)系統(tǒng)決定取決于幾個(gè)因素,包括成本、制造的難易程度以及我們構(gòu)思和可視化其工作方式的能力。
我們選擇不使用輪椅電機(jī),因?yàn)槲覀儾幌M黾映杀尽⑺俣炔混`活(在僅使用輪椅電機(jī)輸出的情況下)以及難以安裝在我們構(gòu)想的框架上。
第 3 階段 - 電機(jī)控制
該團(tuán)隊(duì)決定使用四個(gè)BTS7960電機(jī)驅(qū)動(dòng)器。對于那些做過小型機(jī)器人項(xiàng)目的人(包括團(tuán)隊(duì)中的一些成員)來說,L298N是一種常見的電機(jī)驅(qū)動(dòng)器。BTS7960 沒有太大區(qū)別,但額定電流高達(dá) 40 安培,非常適合我們的大電流應(yīng)用。
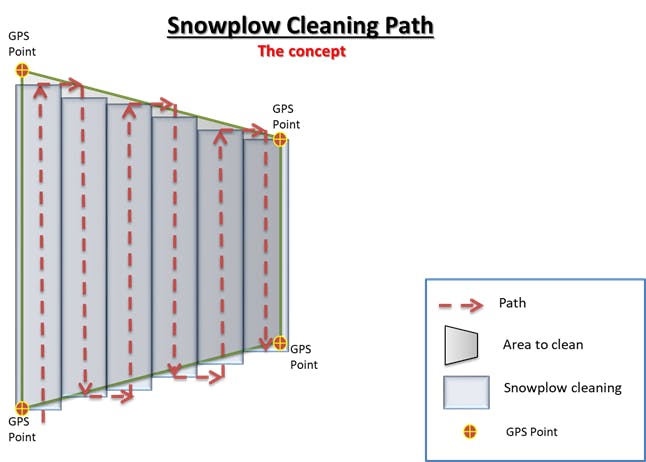
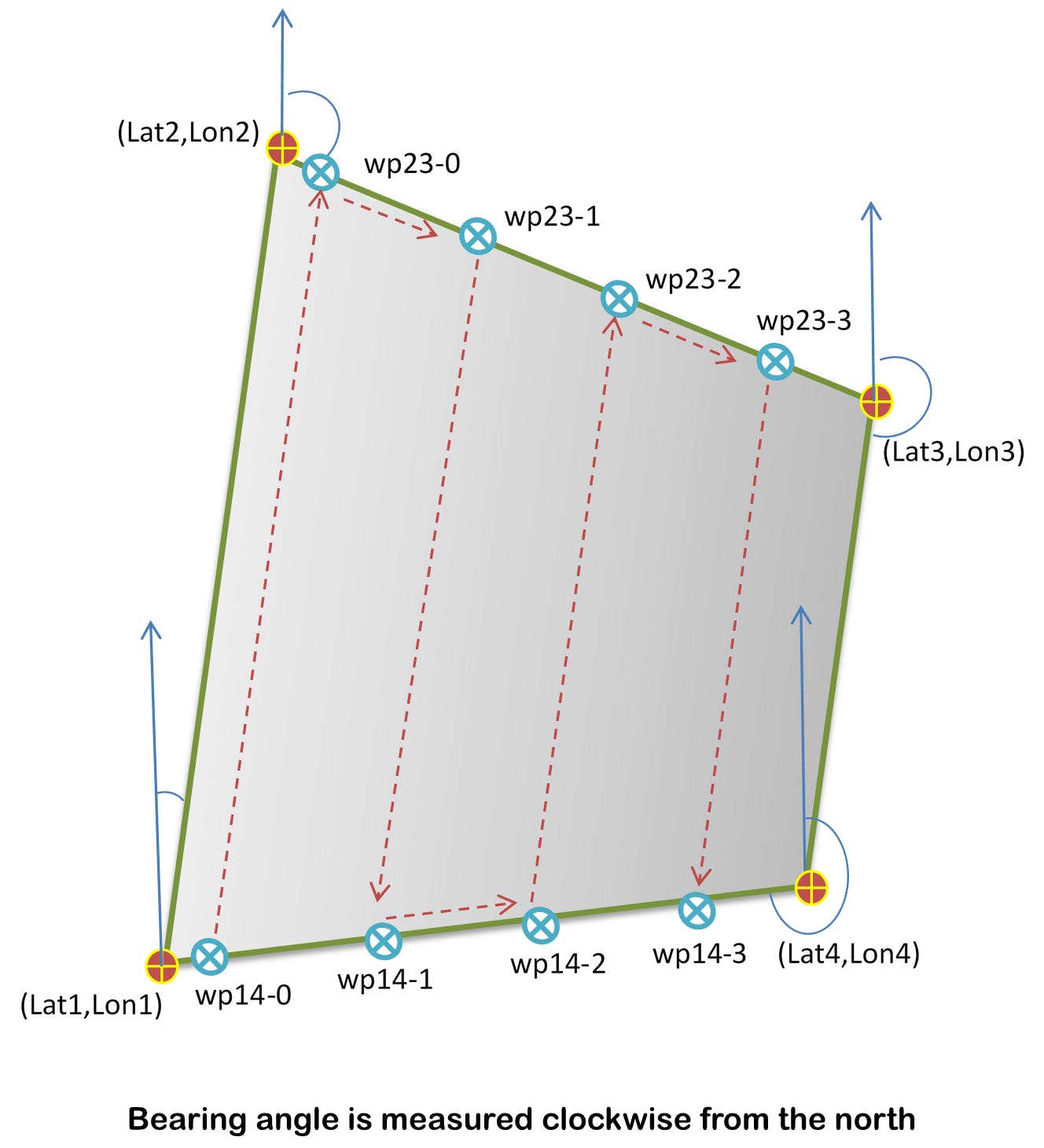
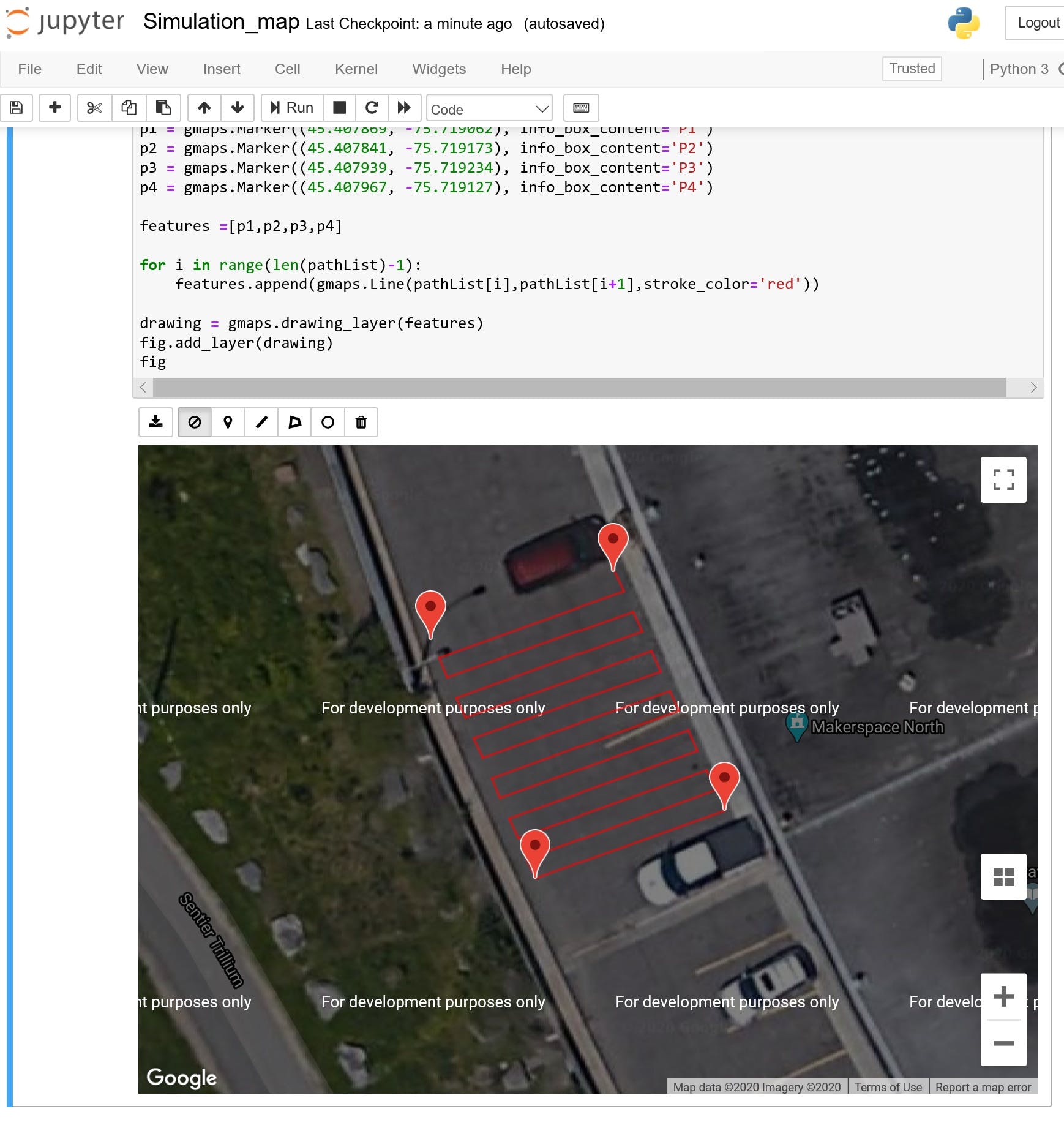
第 4 階段-同時(shí)定位和路徑導(dǎo)航
以下兩張圖片展示了我們的掃雪機(jī)清潔概念的高級視圖
第 3 步:開始構(gòu)建
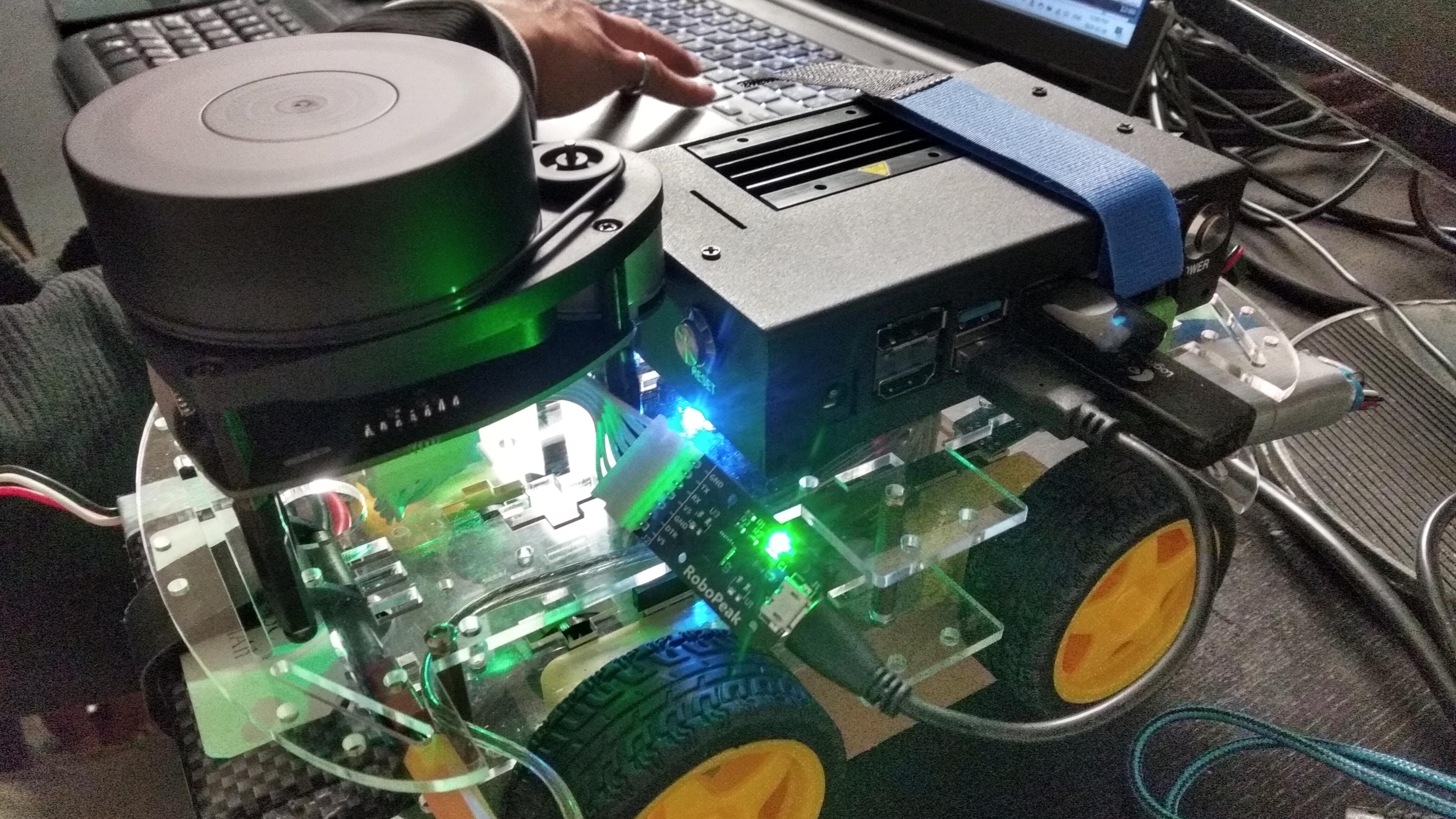
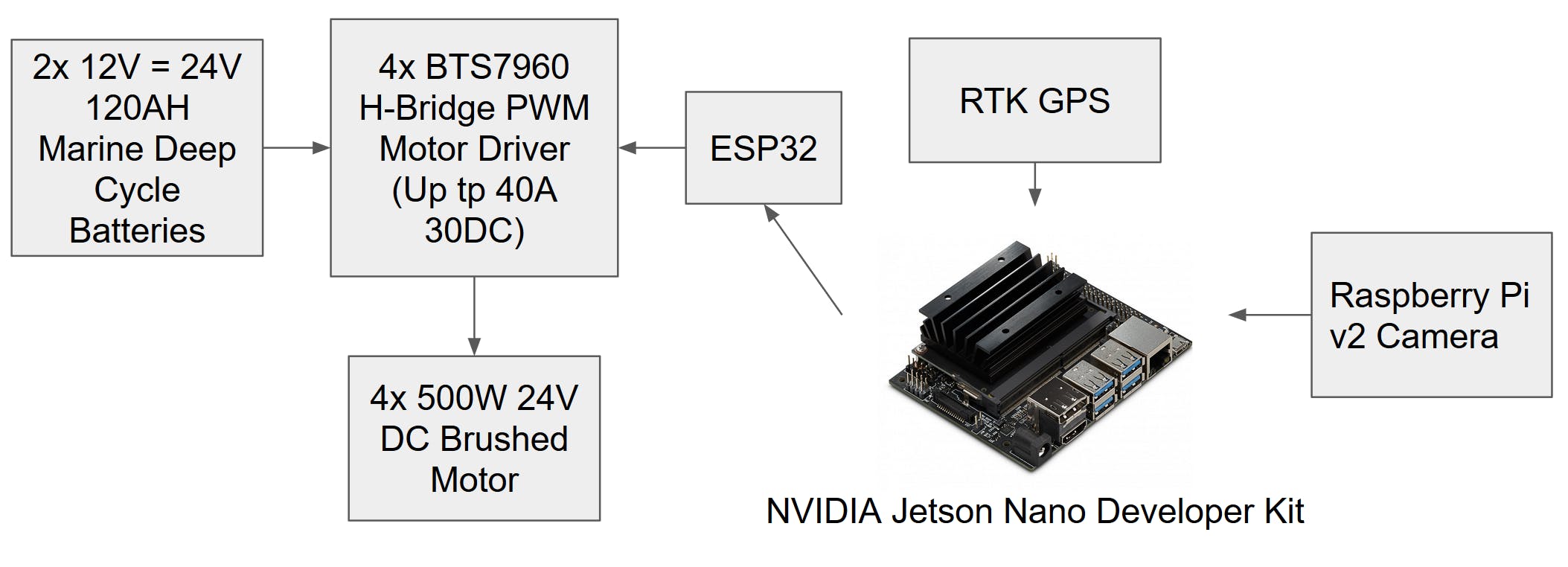
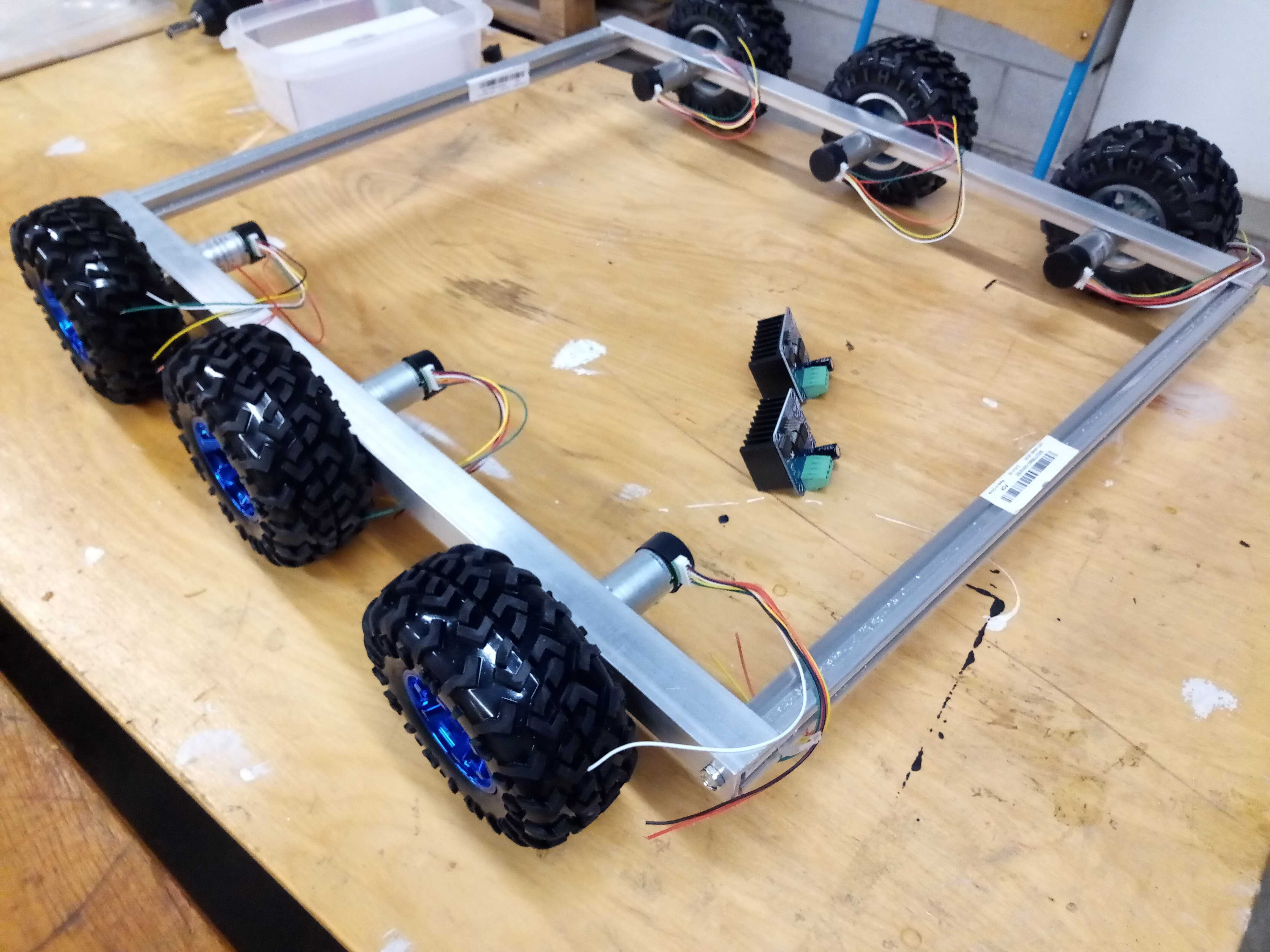
在我們決定花錢建造全尺寸原型之前,我們決定建造一個(gè)較小尺寸的概念車來證明我們的想法。我們從鋁型材和六個(gè) 9V 直流電機(jī)開始,它們的控制方式與上一步中的框圖相同。
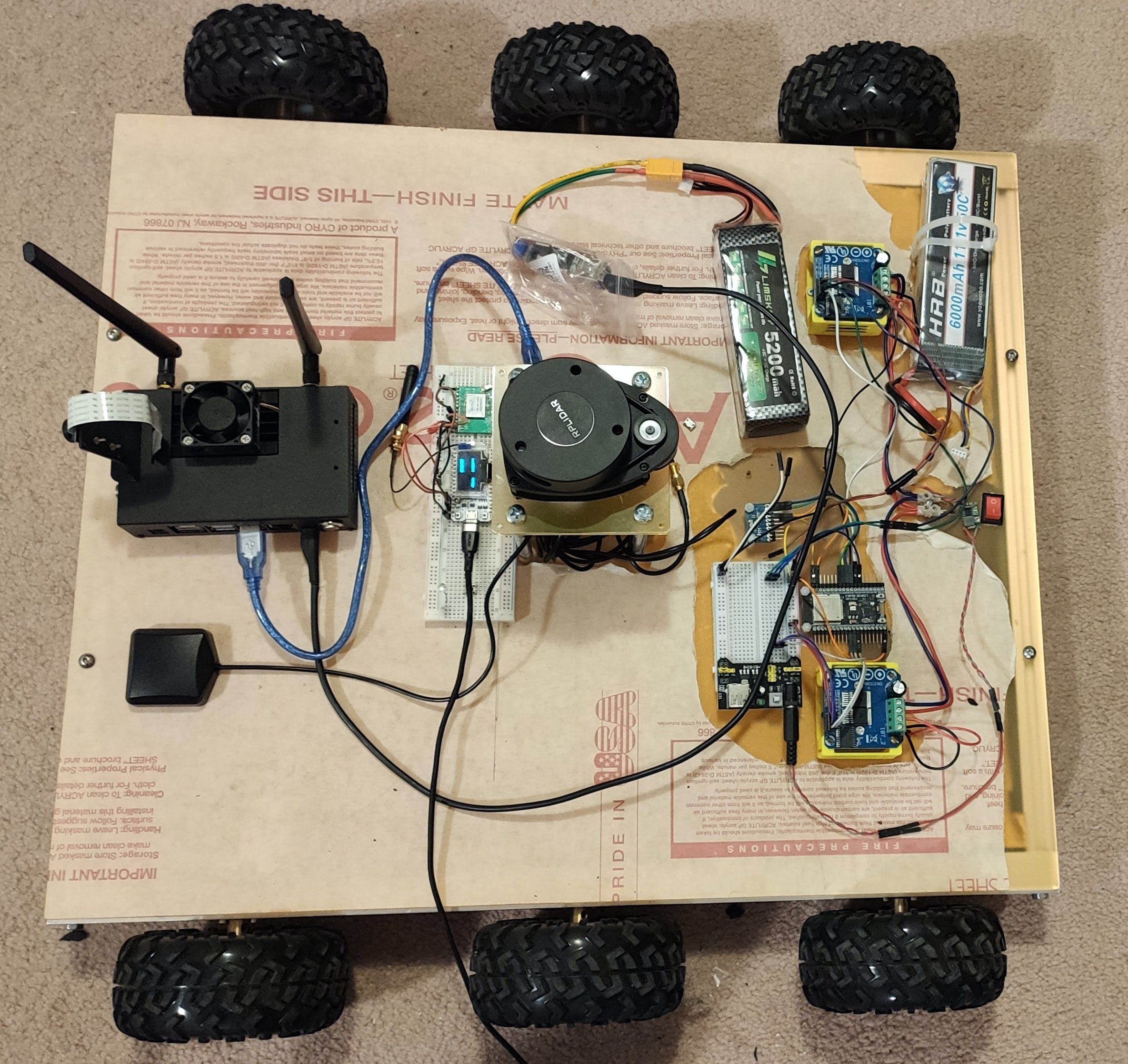
一旦我們向自己證明我們可以在更小的底盤上實(shí)現(xiàn)我們的一些項(xiàng)目目標(biāo),我們就決定是時(shí)候開始構(gòu)建全尺寸原型了。
第一階段 - 安全
全尺寸掃雪機(jī)使用了汽車保險(xiǎn)絲盒,這需要斷開急停按鈕才能打開所有繼電器并允許電流從電池流出,并流向電機(jī)驅(qū)動(dòng)器和電機(jī)(取決于在控制信號上)。
第 2 階段 - 機(jī)械設(shè)計(jì)和組裝
單擊此處查看我們機(jī)械材料的完整分類
我們的任務(wù)是組裝傳動(dòng)系統(tǒng)。這需要以機(jī)械合理(直輪、平行軸)且易于維修(鏈條可以輕松更換,輪子可以拆卸)的方式完成。我們決定采用四輪驅(qū)動(dòng)系統(tǒng),配備四個(gè)獨(dú)立電機(jī)。這樣做有幾個(gè)原因。首先,全輪驅(qū)動(dòng)是必須的,因?yàn)槲覀冃枰軌蛳虻孛鎮(zhèn)鬟f盡可能多的力。這是通過最大化與驅(qū)動(dòng)輪上的法向力成比例的摩擦力來實(shí)現(xiàn)的。如果只有前兩個(gè)或后兩個(gè)輪子有動(dòng)力,那么地面上推雪的力就會更小。其次,我們是不是也想要一個(gè)獨(dú)立的左右驅(qū)動(dòng),我們不需要像汽車那樣的帶有扭輪的轉(zhuǎn)向系統(tǒng),而是我們有坦克式的轉(zhuǎn)向,左輪和右輪以相反的方向轉(zhuǎn)動(dòng)。只有四個(gè)獨(dú)立的電機(jī)可以實(shí)現(xiàn)這些目標(biāo),除非我們使用履帶而不是輪胎。
最后,我們將鏈輪安裝在電機(jī)和輪軸上,將鏈輪焊接到輪轂上,然后將輪胎安裝在一組板上,該板可以容納輪轂。最初的目的是將鏈輪也焊接到這些輪轂上,然后將板用螺栓固定到鏈輪上。但是,我們生產(chǎn)的焊縫不符合要求,車輪是直的,鏈輪是歪的。我們沒有嘗試再次進(jìn)行焊接,而是選擇加工定制的鋁制輪轂適配器。這樣可以更輕松地拆卸車輪,并且是購買更多輪轂和鏈輪的低成本解決方案。總而言之,我們的驅(qū)動(dòng)系統(tǒng)實(shí)現(xiàn)了它的目標(biāo),車輪筆直且同心,我們可以輕松維修鏈條和車輪,并有效地高效地提供動(dòng)力。

電機(jī)將用鏈條連接到輪子上。或者我們可以使用皮帶或齒輪,齒輪很難對齊,而且要復(fù)雜得多,它們需要潤滑,間距很重要,它們會產(chǎn)生推力等。選擇鏈條而不是皮帶,因?yàn)樗鼈兒苋菀讖漠?dāng)?shù)氐奈褰鸬辏以谠O(shè)計(jì)上比皮帶更靈活,我們可以縮短或延長鏈條。為了提供張力,所使用的軸承安裝在枕塊中。枕塊有槽,可以進(jìn)行一些調(diào)整。此外,我們的電機(jī)安裝在我們可以平移的板上,以確保鏈條筆直并調(diào)節(jié)張力。我們用切槽加工板,這樣我們就可以將電機(jī)滑動(dòng)大約 0.125 英寸,允許在我們 0.5 英寸長的鏈節(jié)上進(jìn)行 0.25 英寸的調(diào)整,
第 3 階段 - 電機(jī)控制
我們選擇使用兩個(gè) 12 V 120 Ah 深循環(huán)船用電池為掃雪機(jī)供電。考慮到?jīng)]有重量限制,這些電池是一種理想的具有成本效益的選擇。串聯(lián)連接的電池提供 24 V 電壓,最適合為 500 W 24 V 有刷直流電機(jī)供電。我們將四個(gè)電機(jī)驅(qū)動(dòng)器中的每一個(gè)分別與兩個(gè)電池串聯(lián),從而為每個(gè)驅(qū)動(dòng)器提供 24 V 電壓。在連接到驅(qū)動(dòng)器之前,四根正極電纜中的每根電纜首先通過其自身的 25 A 保險(xiǎn)絲和繼電器。我們選擇了 25 A 保險(xiǎn)絲,因?yàn)樵撾娏髟?24 V 時(shí)會產(chǎn)生 600 W 的功率,假設(shè)電機(jī)能夠在短時(shí)間內(nèi)提供該功率。四個(gè)繼電器連接在一個(gè)簡單的串聯(lián)電路中,由主開關(guān)和一個(gè)由其中一個(gè)電池供電的緊急停止裝置組成。當(dāng)兩個(gè)開關(guān)都閉合時(shí),為四個(gè)繼電器中的每一個(gè)提供 12 V 電壓,從而打開它們并為每個(gè)電機(jī)驅(qū)動(dòng)器供電。當(dāng)緊急停止或主開關(guān)打開時(shí),所有繼電器都關(guān)閉,驅(qū)動(dòng)器的電源被切斷。每個(gè)電機(jī)驅(qū)動(dòng)器也連接到各自的電機(jī)。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。從而打開它們并為每個(gè)電機(jī)驅(qū)動(dòng)器供電。當(dāng)緊急停止或主開關(guān)打開時(shí),所有繼電器都關(guān)閉,驅(qū)動(dòng)器的電源被切斷。每個(gè)電機(jī)驅(qū)動(dòng)器也連接到各自的電機(jī)。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。從而打開它們并為每個(gè)電機(jī)驅(qū)動(dòng)器供電。當(dāng)緊急停止或主開關(guān)打開時(shí),所有繼電器都關(guān)閉,驅(qū)動(dòng)器的電源被切斷。每個(gè)電機(jī)驅(qū)動(dòng)器也連接到各自的電機(jī)。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。當(dāng)緊急停止或主開關(guān)打開時(shí),所有繼電器都關(guān)閉,驅(qū)動(dòng)器的電源被切斷。每個(gè)電機(jī)驅(qū)動(dòng)器也連接到各自的電機(jī)。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。當(dāng)緊急停止或主開關(guān)打開時(shí),所有繼電器都關(guān)閉,驅(qū)動(dòng)器的電源被切斷。每個(gè)電機(jī)驅(qū)動(dòng)器也連接到各自的電機(jī)。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。每個(gè)電機(jī)驅(qū)動(dòng)器從電池接收 24 V 電壓,并可以使用該電源驅(qū)動(dòng)電機(jī)前進(jìn)、后退以及以軟件確定的不同速度。每個(gè)電機(jī)驅(qū)動(dòng)器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉(zhuǎn)換器實(shí)現(xiàn)了這一點(diǎn)。為 ESP32 供電的電路也與主開關(guān)串聯(lián),因此當(dāng)主開關(guān)打開時(shí) ESP32 關(guān)閉。
與制造機(jī)械部件所涉及的問題相比,構(gòu)建電氣系統(tǒng)時(shí)遇到的問題微乎其微。內(nèi)置電壓表在測試電氣系統(tǒng)時(shí)會提前停止工作,但這個(gè)組件不是必需的,因?yàn)槲覀兛梢允褂檬诸^的電壓表測試電壓。最主要的問題是一些安裝的電機(jī)驅(qū)動(dòng)器有故障,但通過一些故障排除和更換壞驅(qū)動(dòng)器解決了這個(gè)問題。
電氣系統(tǒng)的下一步主要是簡化所有電纜并為其增加保護(hù)。在目前的狀態(tài)下,掃雪機(jī)使用了過多的電纜,并且這些電纜的安裝方式?jīng)]有組織。串聯(lián)電池的多根跨接電纜可以換成一根合適的跨接電纜,并且可以焊接所有連接器以確保可靠連接。連接到電池的眾多跳線也可以與單個(gè)高規(guī)格跳線交換,并且塊連接器可用于在需要分配電源的點(diǎn)將它們分成更小的電纜。任何捆綁的電線都可以用套管包裹以確保使用壽命。各個(gè)電機(jī)驅(qū)動(dòng)器也可以直接重新連接到 ESP32,而不是通過中間板。
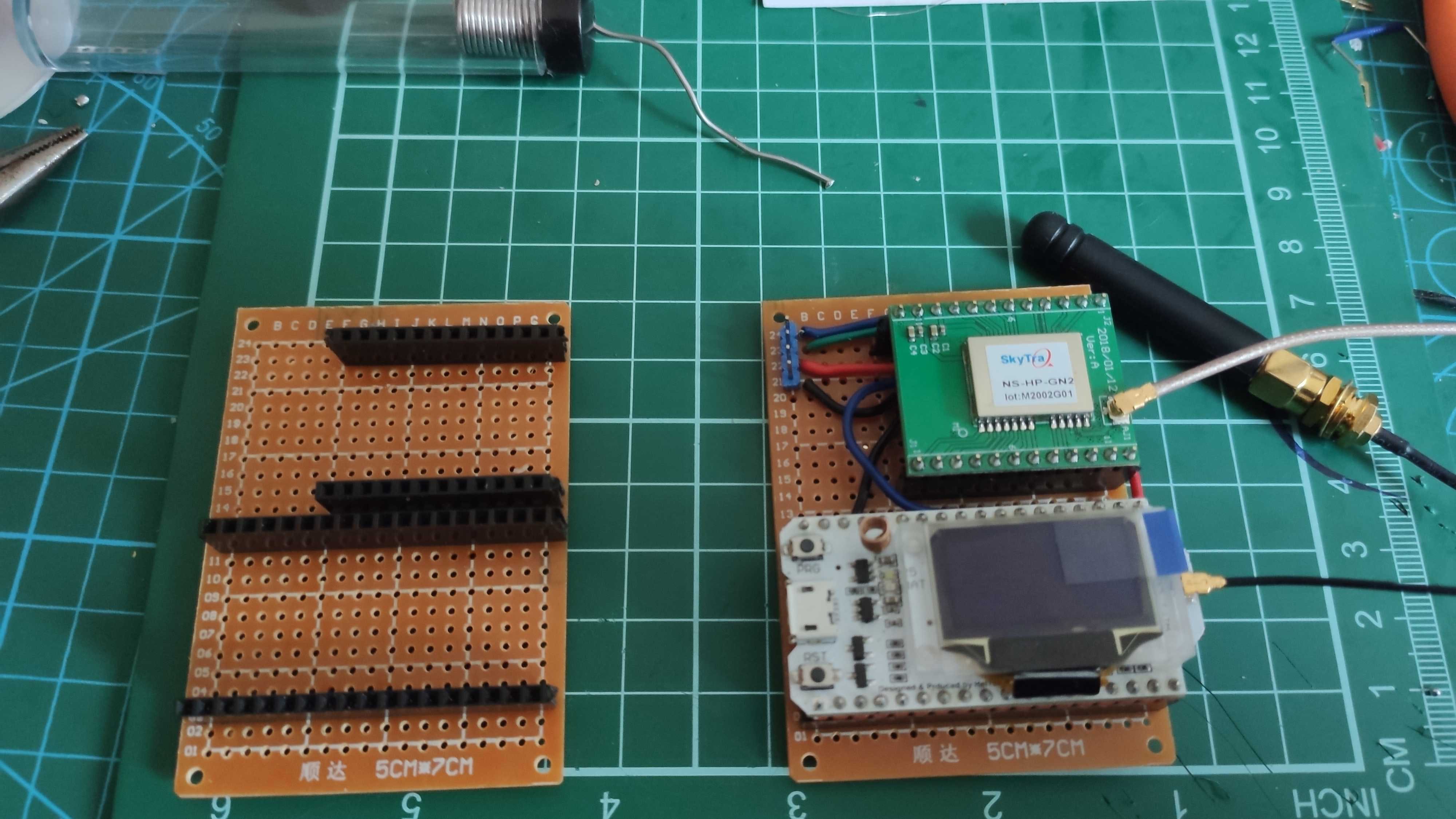
第 4 階段-同時(shí)定位和路徑導(dǎo)航
我們使用了來自 NavSpark NS-HP-GN2的最新雙頻(或多波段)RTK ,它支持 GPS L1/L2C、北斗 B1I/B2I、Galileo E1/E5b、GLONASS L1/L2。更多的衛(wèi)星 = 更高的準(zhǔn)確性和對信號阻塞的更大容忍度。我們使用 2 個(gè)Heltec Lora 32在基站和掃雪機(jī)中的 GPS 接收器之間進(jìn)行糾錯(cuò)通信。我們在北美使用LoRa (遠(yuǎn)程)915Mhz 版本。LoRaWAN 非常適合開放空間和 Wi-Fi 或蜂窩網(wǎng)絡(luò)未覆蓋的區(qū)域。它可以超過30公里的范圍。但是,它的主要不便在于它具有 27 kbps 的低數(shù)據(jù)傳輸限制。我們需要將通信波特率降低到 19200。RTK 接收器可以毫無問題地發(fā)送 10Hz 的糾錯(cuò)信號。NMEAnd RTCM只需要 9600 波特。Heltec Lora32 具有 Wi-Fi 和 LoRaWAN 兩種通信方式。我們可以根據(jù)操作區(qū)域進(jìn)行配置。
RTK 解決方案(差分 GPS)已在測量領(lǐng)域使用多年;但是,此類系統(tǒng)的成本通常非常高(在 5 位數(shù)范圍內(nèi))。我們今天實(shí)施的系統(tǒng)采用市場上最新的經(jīng)濟(jì)高效技術(shù),基站和 Rover(掃雪機(jī))的價(jià)格僅為 300 美元。
?
- 自動(dòng)燈開關(guān)開源構(gòu)建
- 儀器手套開源構(gòu)建
- 蛋打開源構(gòu)建
- 護(hù)眼套裝開源構(gòu)建
- 西蒙小游戲開源構(gòu)建
- 自動(dòng)理療機(jī)開源構(gòu)建
- 火焰燈開源構(gòu)建
- 免觸摸開關(guān)開源構(gòu)建
- 自主種子種植系統(tǒng)開源分享
- 使用Launchpad和Energia構(gòu)建的開源項(xiàng)目
- 教育收音機(jī)開源構(gòu)建
- 自主系統(tǒng)開源分享
- Grindbit的構(gòu)建開源項(xiàng)目
- 《單片機(jī)原理及應(yīng)用》課程設(shè)計(jì)的構(gòu)建與實(shí)踐
- 基于PC機(jī)的自主管理模型
- PyTorch神經(jīng)網(wǎng)絡(luò)模型構(gòu)建過程 533次閱讀
- 基于CW32單片機(jī)做的軟硬件開源項(xiàng)目 1155次閱讀
- 推薦GitHub上與嵌入式相關(guān)的高星開源項(xiàng)目 1148次閱讀
- 清華等開源「工具學(xué)習(xí)基準(zhǔn)」ToolBench,微調(diào)模型ToolLLaMA性能超越ChatGPT 603次閱讀
- 使用Ansible構(gòu)建虛擬機(jī)部署Linux的最佳實(shí)踐 1135次閱讀
- 前沿開源技術(shù)領(lǐng)域的開源大數(shù)據(jù)一一解讀 1180次閱讀
- 如何構(gòu)建基于狀態(tài)機(jī)的軟件系統(tǒng) 1567次閱讀
- 尋找開源硬件成功的觸發(fā)器 755次閱讀
- RT-Thread 4.1.0的CMake構(gòu)建教程 3415次閱讀
- 如何使用DonkeyCar平臺構(gòu)建一個(gè)自主機(jī)器人 2296次閱讀
- 構(gòu)建開源芯片生態(tài)需要什么要的 4878次閱讀
- 無人機(jī)系統(tǒng)如何實(shí)現(xiàn)自主性 4251次閱讀
- NASA的開源軟件是什么?NASA的開源軟件的詳細(xì)分析 7444次閱讀
- Jenkins詳細(xì)安裝與構(gòu)建部署使用教程 1776次閱讀
- 眾核多計(jì)算模式系統(tǒng)的構(gòu)建 3972次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論