") 從局部性能優(yōu)化到系統(tǒng)架構優(yōu)化,F(xiàn)PGA在機器人上的應用
從局部性能優(yōu)化到系統(tǒng)架構優(yōu)化,F(xiàn)PGA在機器人上的應用
想要機器人實現(xiàn)智能化,需要具有敏銳且優(yōu)秀的感知,同時還能有精準的運控。就感知計算而言,尤其是視覺以及深度學習,計算量往往很大,對器件性能要求高。而且感知算法也在不斷發(fā)展,這需要對機器人處理系統(tǒng)做不斷地更新。
就控制而言,FPGA可以應用在分散控制的小節(jié)點上,也可以在大節(jié)點上應用更高效能的FPGA SoC。區(qū)別于MCU,通過FPGA控制的系統(tǒng)最明顯的優(yōu)勢點就是驅動反應時間會大大縮短,整個系統(tǒng)的運行速度會有一個較大提升。畢竟MCU是運作在單一節(jié)點上的,在不添加拓展的情況下,隨著復雜的多軸運算需求越來越高,運作難免會有些乏力。
FPGA在機器人應用上的優(yōu)勢很明顯,不少廠商也在這塊做了很多年,那么在深入應用上又有哪些突破點值得期待?
FPGA與運動驅控
目前很多機器人本體廠商、機器人控制器廠商用FPGA已經(jīng)用了很多年了,還有不少本體廠商、機器人控制器廠商現(xiàn)在也在嘗試去使用。首先可以明確的一點是,以目前FPGA的性能來說,用在常規(guī)的伺服驅動、控制領域,性能甚至是過剩的。機器人的運動性能不僅和伺服控制相關,還與運動算法以及本體的機械結構密切相關。
就算法而言,目前大多基于CPU + Linux + ROS + EtherCAT這一技術體系設計,將算法模塊從CPU移植到FPGA中,F(xiàn)PGA的優(yōu)勢并沒有被充分應用,另一方面在機械設計沒有重大革命性進步的情況下,機器人性能的天花板是存在的,難免顯得“過剩”。
常規(guī)的FPGA運動驅控已經(jīng)有很多案例可循了,將FPGA用于實現(xiàn)SVPWM、三環(huán)反饋控制,甚至實現(xiàn)驅控一體。我們挑機器人四大家族中的安川來看,作為工業(yè)機器人全球市占率排名前幾的廠商,安川的機器人控制器用Intel的FPGA作為ASIC的替代方案。
 ?
?
(Intel的FPGA,Intel)
Intel FPGA提供了各類可配置的嵌入式 SRAM、高速收發(fā)器、高速 I/O、邏輯模塊和路由。用在控制上優(yōu)勢也很明顯,比起復雜函數(shù)計算運行在微處理器上,配備板載數(shù)字信號處理,在FPGA上執(zhí)行高速 32 位雙精度浮點運算更容易實現(xiàn)運控所需的精度和速度。Intel FPGA在安川的運控上提供了包括PCI Express在內的多種硬件IP,確保了總線連接的可靠又實現(xiàn)外圍邏輯集成。
這些可以說仍然是對比CPU+操作系統(tǒng)+ROS架構在局部性能的優(yōu)化,那深入應用可以往哪里突破?如果將在各軸的控制基礎上實時施加變化的微調量,以此實現(xiàn)對各種狀態(tài)誤差導致的最終狀態(tài)誤差進行補償,將機器人性能進行這種層次的拔高,這或許是超越傳統(tǒng)控制架構FPGA實現(xiàn)深入應用的一個方向。
FPGA與機器視覺
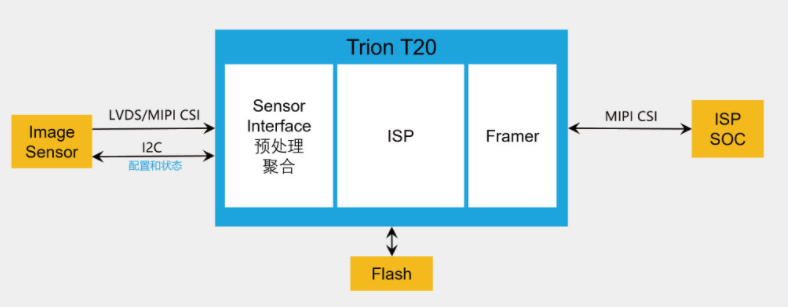
作為FPGA在機器人應用里最火熱的方向,視覺被很多廠商視為FPGA打開機器人市場最好的切入口。在機器視覺設計中,不可避免要和現(xiàn)在主流的SoC進行接口設計,這些接口主要以移動產(chǎn)業(yè)處理器接口作為標準,集成MIPI CSI硬核的FPGA往往很吃香,比如國內FPGA廠商易靈思的Trion系列。
 ?
?
(T20FPGA,易靈思)
在執(zhí)行圖像處理算法與訓練好的AI模型時,F(xiàn)PGA是與GPU并列的主流方案,而且在功耗方面具備非常大的優(yōu)勢。并且因為其SOC屬性,能夠和其他各種功能模塊高效協(xié)同。從AMD Xilinx的Kria SoM以及瑞薩、易靈思的ProMe SoM來看,目前FPGA廠商很青睞于以System on Module這種形式打入機器人視覺系統(tǒng)。
SoM能提供嵌入式處理系統(tǒng)的各種核心組件,包括處理器內核、通信接口和內存模塊等。從視頻處理到智能傳感到機器視覺,這種模塊化解決方案讓SoM成了嵌入機器人感知系統(tǒng)的理想選擇。SoM與其他器件的配合使用不僅可以完成在機器視覺系統(tǒng)上的局部優(yōu)化,對于整個機器人設計也能給出基于模塊化設計的優(yōu)化。不論是不是以SoM形式切入,將這種模塊間的高效協(xié)同發(fā)揮出最大的效果是FPGA視覺應用值得期待的突破方向。
小結
目前,在FPGA深入應用方面,國內正處在從局部性能優(yōu)化(伺服驅動器、機器視覺)到系統(tǒng)架構優(yōu)化轉變的階段。FPGA目前的性能對于機器人應用來說是過剩的,如何在應用中充分發(fā)揮出FPGA的性能與協(xié)同性,這是“深入應用”的關鍵。
就控制而言,FPGA可以應用在分散控制的小節(jié)點上,也可以在大節(jié)點上應用更高效能的FPGA SoC。區(qū)別于MCU,通過FPGA控制的系統(tǒng)最明顯的優(yōu)勢點就是驅動反應時間會大大縮短,整個系統(tǒng)的運行速度會有一個較大提升。畢竟MCU是運作在單一節(jié)點上的,在不添加拓展的情況下,隨著復雜的多軸運算需求越來越高,運作難免會有些乏力。
FPGA在機器人應用上的優(yōu)勢很明顯,不少廠商也在這塊做了很多年,那么在深入應用上又有哪些突破點值得期待?
FPGA與運動驅控
目前很多機器人本體廠商、機器人控制器廠商用FPGA已經(jīng)用了很多年了,還有不少本體廠商、機器人控制器廠商現(xiàn)在也在嘗試去使用。首先可以明確的一點是,以目前FPGA的性能來說,用在常規(guī)的伺服驅動、控制領域,性能甚至是過剩的。機器人的運動性能不僅和伺服控制相關,還與運動算法以及本體的機械結構密切相關。
就算法而言,目前大多基于CPU + Linux + ROS + EtherCAT這一技術體系設計,將算法模塊從CPU移植到FPGA中,F(xiàn)PGA的優(yōu)勢并沒有被充分應用,另一方面在機械設計沒有重大革命性進步的情況下,機器人性能的天花板是存在的,難免顯得“過剩”。
常規(guī)的FPGA運動驅控已經(jīng)有很多案例可循了,將FPGA用于實現(xiàn)SVPWM、三環(huán)反饋控制,甚至實現(xiàn)驅控一體。我們挑機器人四大家族中的安川來看,作為工業(yè)機器人全球市占率排名前幾的廠商,安川的機器人控制器用Intel的FPGA作為ASIC的替代方案。
?(Intel的FPGA,Intel)
Intel FPGA提供了各類可配置的嵌入式 SRAM、高速收發(fā)器、高速 I/O、邏輯模塊和路由。用在控制上優(yōu)勢也很明顯,比起復雜函數(shù)計算運行在微處理器上,配備板載數(shù)字信號處理,在FPGA上執(zhí)行高速 32 位雙精度浮點運算更容易實現(xiàn)運控所需的精度和速度。Intel FPGA在安川的運控上提供了包括PCI Express在內的多種硬件IP,確保了總線連接的可靠又實現(xiàn)外圍邏輯集成。
這些可以說仍然是對比CPU+操作系統(tǒng)+ROS架構在局部性能的優(yōu)化,那深入應用可以往哪里突破?如果將在各軸的控制基礎上實時施加變化的微調量,以此實現(xiàn)對各種狀態(tài)誤差導致的最終狀態(tài)誤差進行補償,將機器人性能進行這種層次的拔高,這或許是超越傳統(tǒng)控制架構FPGA實現(xiàn)深入應用的一個方向。
FPGA與機器視覺
作為FPGA在機器人應用里最火熱的方向,視覺被很多廠商視為FPGA打開機器人市場最好的切入口。在機器視覺設計中,不可避免要和現(xiàn)在主流的SoC進行接口設計,這些接口主要以移動產(chǎn)業(yè)處理器接口作為標準,集成MIPI CSI硬核的FPGA往往很吃香,比如國內FPGA廠商易靈思的Trion系列。
?(T20FPGA,易靈思)
在執(zhí)行圖像處理算法與訓練好的AI模型時,F(xiàn)PGA是與GPU并列的主流方案,而且在功耗方面具備非常大的優(yōu)勢。并且因為其SOC屬性,能夠和其他各種功能模塊高效協(xié)同。從AMD Xilinx的Kria SoM以及瑞薩、易靈思的ProMe SoM來看,目前FPGA廠商很青睞于以System on Module這種形式打入機器人視覺系統(tǒng)。
SoM能提供嵌入式處理系統(tǒng)的各種核心組件,包括處理器內核、通信接口和內存模塊等。從視頻處理到智能傳感到機器視覺,這種模塊化解決方案讓SoM成了嵌入機器人感知系統(tǒng)的理想選擇。SoM與其他器件的配合使用不僅可以完成在機器視覺系統(tǒng)上的局部優(yōu)化,對于整個機器人設計也能給出基于模塊化設計的優(yōu)化。不論是不是以SoM形式切入,將這種模塊間的高效協(xié)同發(fā)揮出最大的效果是FPGA視覺應用值得期待的突破方向。
小結
目前,在FPGA深入應用方面,國內正處在從局部性能優(yōu)化(伺服驅動器、機器視覺)到系統(tǒng)架構優(yōu)化轉變的階段。FPGA目前的性能對于機器人應用來說是過剩的,如何在應用中充分發(fā)揮出FPGA的性能與協(xié)同性,這是“深入應用”的關鍵。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
FPGA
+關注
關注
1630文章
21798瀏覽量
606065 -
機器人
+關注
關注
211文章
28646瀏覽量
208440
發(fā)布評論請先 登錄
相關推薦
BOCINI攜手海康機器人優(yōu)化倉儲流程
近日,BOCINI為應對7000平米倉庫在高峰期面臨的訂單出入庫揀選挑戰(zhàn),決定攜手海康機器人共同探索服裝倉儲的智能解決方案。 為了優(yōu)化揀選流程,BOCINI引入了海康機器人的料箱
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統(tǒng),自主機器人的感知系統(tǒng),自主
發(fā)表于 01-04 19:22
《具身智能機器人系統(tǒng)》第10-13章閱讀心得之具身智能機器人計算挑戰(zhàn)
閱讀《具身智能機器人系統(tǒng)》第10-13章,我對具身智能機器人的工程實踐有了全新認識。第10章從實時性角度剖析了機器人計算加速問題。機器人定位
發(fā)表于 01-04 01:15
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書
如何使用PyTorch進行數(shù)字圖像處理,它借助攝像頭來獲取視頻的圖像信息,然后通過已有的圖像識別框架模型經(jīng)深度學習和優(yōu)化以達到更精準的識別結果,從而為進一步的執(zhí)行處理提供數(shù)據(jù)支持和依據(jù)。而《具身智能機器人系統(tǒng)
發(fā)表于 01-01 15:50
如何優(yōu)化總線系統(tǒng)的性能
總線系統(tǒng)是計算機和其他電子設備中用于傳輸數(shù)據(jù)的關鍵組件。性能優(yōu)化可以提高數(shù)據(jù)傳輸速率、降低延遲,并增強系統(tǒng)的可靠性和擴展性。 1. 理解總線系統(tǒng)
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
中取得了令人矚目的效果。
閱讀感悟
從傳統(tǒng)的手動編程到借助大模型實現(xiàn)智能化、自主化,從單一模態(tài)的交互到多模態(tài)信息的深度融合,再到擴散模型的應用,機器
發(fā)表于 12-29 23:04
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
現(xiàn)狀和前沿研究,詳細介紹大模型的構建方法、訓練數(shù)據(jù)、模型架構和優(yōu)化技術。
第4部分(第10章到第13章)深入探討提升機器人計算實時性、算法安全性、系
發(fā)表于 12-28 21:12
《具身智能機器人系統(tǒng)》第7-9章閱讀心得之具身智能機器人與大模型
將自然語言理解與運動規(guī)劃融為一體。這種端到端的方法使機器人能夠直接從人類指令生成動作序列,大幅簡化了控制流程。該項目的工作流程包含設計并封裝一個人機器人函數(shù)庫、編寫清晰地描述提示詞、
發(fā)表于 12-24 15:03
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
,數(shù)據(jù)對于訓練增強和優(yōu)化機器人能力的深度學習模型至關重要。
從財務上講,用戶數(shù)據(jù)對互聯(lián)網(wǎng)公司具有重要價值,估計每個用戶 600 美元,考慮到
發(fā)表于 12-24 00:33
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
的快速發(fā)展,相關人才的需求也在不斷增加,通過閱讀該書可以幫助大家系統(tǒng)性地了解和分析當前具身智能機器人系統(tǒng)的發(fā)展現(xiàn)狀和前沿研究,為未來的研究和開發(fā)工作提供指導。此外,本書還可以為研究人員
發(fā)表于 12-20 19:17
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎模塊
智能機器人的歷史與未來”中,布魯克斯的觀點給我?guī)砩羁虇l(fā)。他在20世紀80年代提出的觀點至今仍具參考價值:智能行為源于實際的物理互動,而非單純依靠預設算法。這打破了傳統(tǒng)AI僅關注算法優(yōu)化的局限,將
發(fā)表于 12-19 22:26
如何優(yōu)化emc存儲性能
在當今的數(shù)據(jù)中心環(huán)境中,存儲性能對于業(yè)務連續(xù)性和數(shù)據(jù)訪問速度至關重要。EMC作為領先的存儲解決方案提供商,其產(chǎn)品線涵蓋了從入門級到企業(yè)級的存儲系統(tǒng)。然而,即使是最好的存儲
如何優(yōu)化FPGA設計的性能
優(yōu)化FPGA(現(xiàn)場可編程門陣列)設計的性能是一個復雜而多維的任務,涉及多個方面和步驟。以下是一些關鍵的優(yōu)化策略: 一、明確性能指標 確定需求
優(yōu)化 FPGA HLS 設計
減少錯誤并更容易調試。然而,經(jīng)常出現(xiàn)的問題是性能權衡。在高度復雜的 FPGA 設計中實現(xiàn)高性能需要手動優(yōu)化 RTL 代碼,而這對于HLS開發(fā)
發(fā)表于 08-16 19:56
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
、Zynq和攝像頭為硬件基礎,搭建了六自由度機器人視覺平臺。
(2)設計了基于 FPGA的視覺檢測方案。利用 西林提供的 HLS和CV庫對從攝像頭采集到的像素流進行實時處理,并設計了
發(fā)表于 05-29 16:17





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論