") 使用Arduino和加速度計(jì)構(gòu)建一個(gè)簡(jiǎn)單且便宜的計(jì)步器
使用Arduino和加速度計(jì)構(gòu)建一個(gè)簡(jiǎn)單且便宜的計(jì)步器
如今,健身手環(huán)越來(lái)越流行,它不僅可以計(jì)算腳步聲,還可以跟蹤您燃燒的卡路里、顯示心跳率、放映時(shí)間等等。這些物聯(lián)網(wǎng)設(shè)備與云同步,因此您可以在智能手機(jī)上輕松獲取所有身體活動(dòng)的歷史記錄。
計(jì)步器是僅用于計(jì)算腳步的設(shè)備。因此,在本教程中,我們將使用 Arduino 和加速度計(jì)構(gòu)建一個(gè)簡(jiǎn)單且便宜的 DIY 計(jì)步器。該計(jì)步器將計(jì)算腳步的數(shù)量并將其顯示在16x2 LCD 模塊上。這款計(jì)步器可以與這款A(yù)rduino 智能手表集成。
所需組件
Arduino納米
ADXL 335 加速度計(jì)
16*2液晶
液晶 I2C 模塊
電池
ADXL335 加速度計(jì)
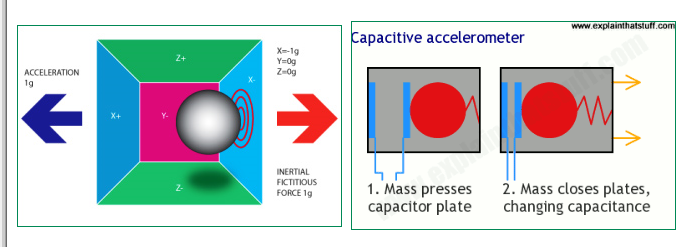
ADXL335 是一款完整的 3 軸模擬加速度計(jì),它基于電容感應(yīng)原理工作。它是一種小型、薄型、低功耗模塊,帶有多晶硅表面微加工傳感器和信號(hào)調(diào)理電路。ADXL335 加速度計(jì)可以測(cè)量靜態(tài)和動(dòng)態(tài)加速度。在這個(gè) Arduino 計(jì)步器項(xiàng)目中,ADXL335 加速度計(jì)將充當(dāng)計(jì)步器傳感器。
加速度計(jì)是一種可以將任何方向的加速度轉(zhuǎn)換為其各自的可變電壓的設(shè)備。這是通過(guò)使用電容器來(lái)實(shí)現(xiàn)的(參見(jiàn)圖片),當(dāng) Accel 移動(dòng)時(shí),其內(nèi)部的電容器也會(huì)根據(jù)運(yùn)動(dòng)發(fā)生變化(參見(jiàn)圖片),因?yàn)殡娙菔亲兓模虼艘部梢垣@得可變電壓。
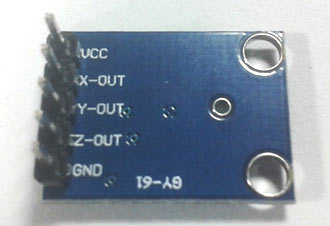
下面是加速度計(jì)的正面和背面圖像以及引腳說(shuō)明-
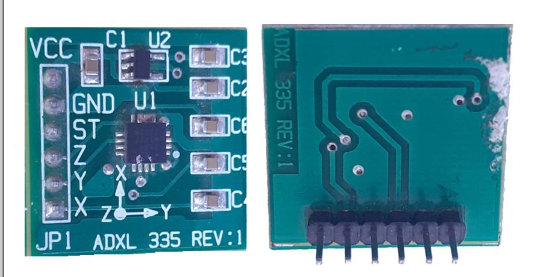
加速度計(jì)引腳說(shuō)明:
Vcc- 5 伏電源應(yīng)連接到此引腳。
X-OUT- 該引腳在 x 方向提供模擬輸出
Y-OUT- 該引腳在 y 方向提供模擬輸出
Z-OUT- 此引腳在 z 方向提供模擬輸出
GND-地
ST- 此引腳用于設(shè)置傳感器的靈敏度
電路原理圖
下面給出了Arduino 加速度計(jì)步數(shù)計(jì)數(shù)器的電路圖。
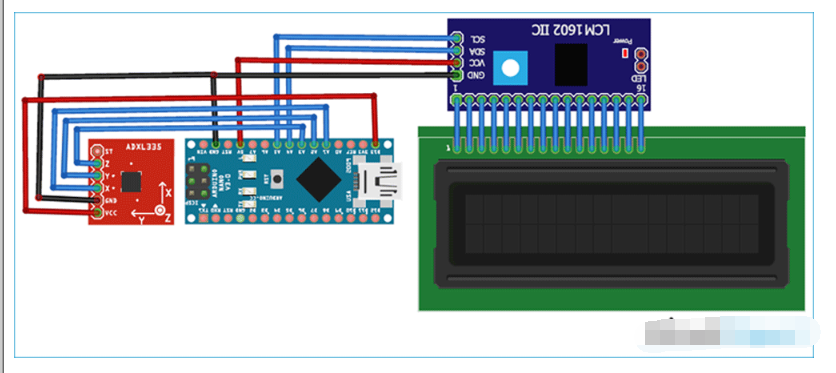
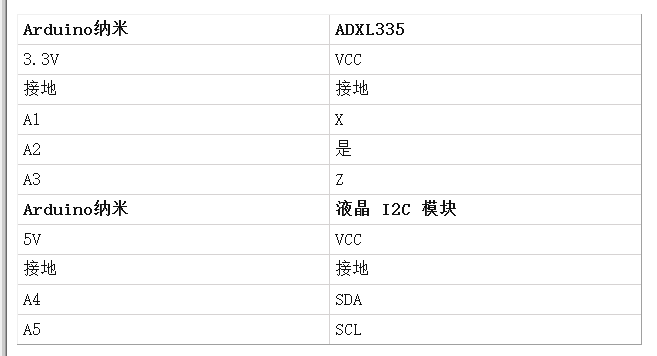
在這個(gè)電路中,我們使用 ADXL335 Accelerometer 與 Arduino Nano 連接。加速度計(jì)的 X、Y 和 Z 引腳與 Arduino Nano 的模擬引腳(A1、A2 和 A3)連接。要將 16x2 LCD 模塊與 Arduino 連接,我們使用的是 I2C 模塊。I2C 模塊的 SCL 和 SDA 引腳分別連接到 Arduino Nano 的 A5 和 A4 引腳。下表給出了完整的連接:
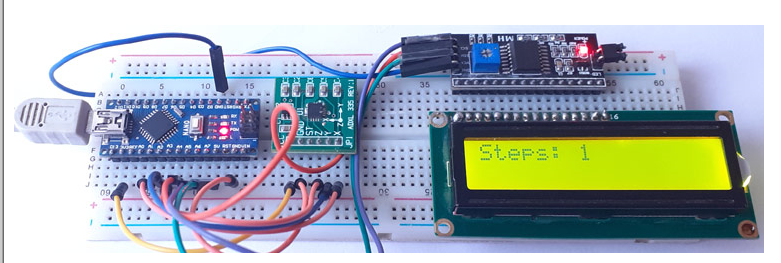
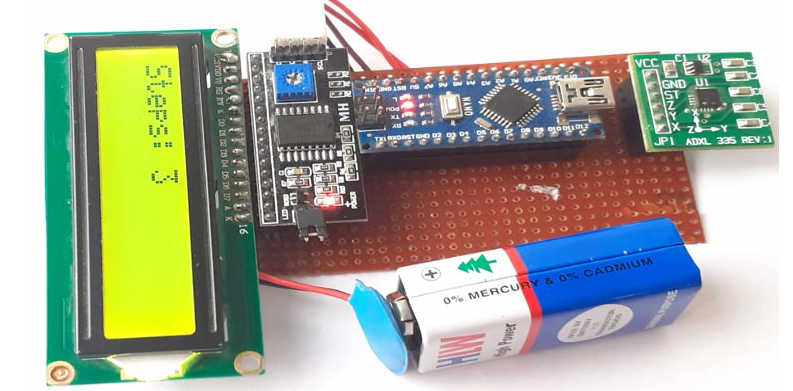
我們首先在面包板上使用 Arduino設(shè)置構(gòu)建了這個(gè)計(jì)步器
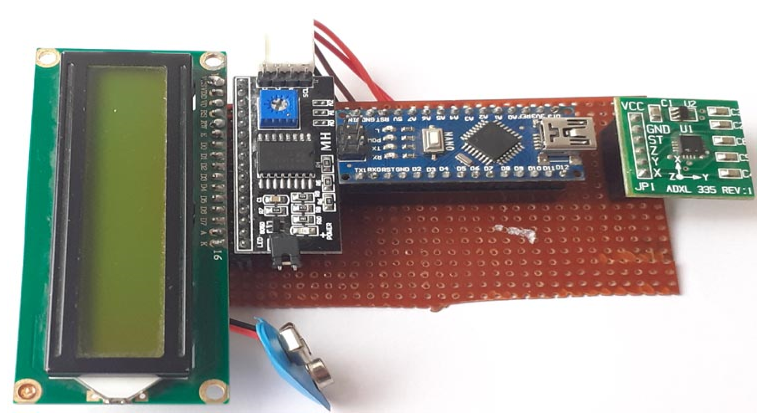
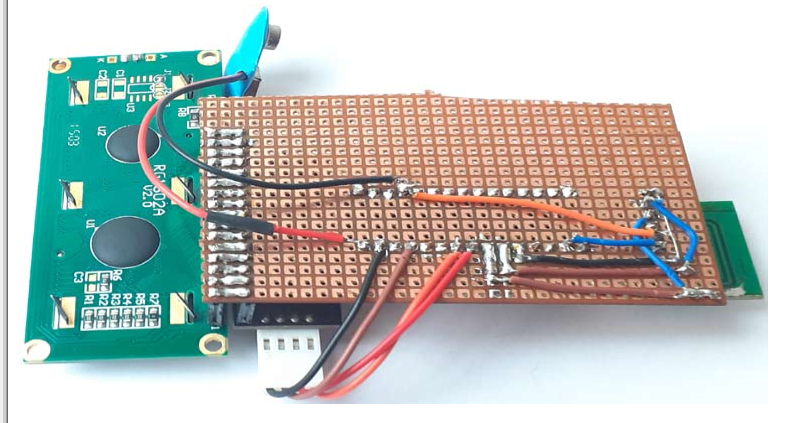
在成功測(cè)試后,我們通過(guò)將所有組件焊接到 Perfboard 上來(lái)在 Perfboard 上復(fù)制它,如下所示:
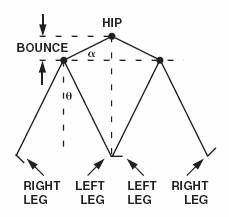
計(jì)步器如何工作?
計(jì)步器使用向前、垂直和側(cè)面的三個(gè)運(yùn)動(dòng)分量來(lái)計(jì)算一個(gè)人所采取的總步數(shù)。計(jì)步器系統(tǒng)使用加速度計(jì)來(lái)獲取這些值。加速度計(jì)在每個(gè)定義的編號(hào)后不斷更新 3 軸加速度的最大值和最小值。的樣品。這3個(gè)軸的平均值(Max + Min)/2,稱為動(dòng)態(tài)閾值水平,該閾值用于決定是否邁步。
跑步時(shí),計(jì)步器可以在任何方向,因此計(jì)步器使用加速度變化最大的軸計(jì)算步數(shù)。
現(xiàn)在讓我快速了解一下這個(gè) Arduino 計(jì)步器的工作原理:
首先,計(jì)步器一通電就開(kāi)始校準(zhǔn)。
然后在void循環(huán)函數(shù)中,不斷的從X、Y、Z軸獲取數(shù)據(jù)。
之后,它計(jì)算從起點(diǎn)開(kāi)始的總加速度矢量。
加速度矢量是 X、Y 和 Z 軸值的平方根 (x^2+y^2+z^2)。
然后將平均加速度值與閾值進(jìn)行比較以計(jì)算步數(shù)。
如果加速度矢量超過(guò)閾值,則增加步數(shù);否則,它會(huì)丟棄無(wú)效的振動(dòng)。
對(duì) Arduino 計(jì)步器進(jìn)行編程
本文檔末尾提供了完整的Arduino 計(jì)步器代碼。在這里,我們將解釋此代碼的一些重要片段。
像往常一樣,通過(guò)包含所有必需的庫(kù)來(lái)啟動(dòng)代碼。ADXL335 加速度計(jì)不需要任何庫(kù),因?yàn)樗峁┠M輸出。
#include
之后,定義連接加速度計(jì)的 Arduino 引腳。
常量 int xpin = A1; 常量 int ypin = A2; 常量 int zpin = A3;
定義加速度計(jì)的閾值。該閾值將與加速度矢量進(jìn)行比較以計(jì)算步數(shù)。
浮動(dòng)閾值 = 6;
在void setup內(nèi)部,函數(shù)會(huì)在系統(tǒng)通電時(shí)校準(zhǔn)系統(tǒng)。
校準(zhǔn)();
在void 循環(huán)函數(shù)內(nèi)部,它將讀取 100 個(gè)樣本的 X、Y 和 Z 軸值。
for (int a = 0; a < 100; a++) { xaccl[a] = float(analogRead(xpin) - 345); 延遲(1); yaccl[a] = float(analogRead(ypin) - 346); 延遲(1); zaccl[a] = float(analogRead(zpin) - 416); 延遲(1);
獲得 3 軸值后,通過(guò)取 X、Y 和 Z 軸值的平方根來(lái)計(jì)算總加速度矢量。
totvect[a] = sqrt(((xaccl[a] - xavg) * (xaccl[a] - xavg)) + ((yaccl[a] - yavg) * (yaccl[a] - yavg)) + ((zval [a] - zavg) * (zval[a] - zavg)));
然后計(jì)算最大和最小加速度矢量值的平均值。
totave[a] = (totvect[a] + totvect[a - 1]) / 2 ;
現(xiàn)在將平均加速度與閾值進(jìn)行比較。如果平均值大于閾值,則增加步數(shù)并提高標(biāo)志。
if (totave[a] > 閾值 && flag == 0)
{
步數(shù) = 步數(shù) + 1;
標(biāo)志 = 1; }
如果平均值大于閾值但標(biāo)志已升起,則什么也不做。
else if (totave[a] > threshold && flag == 1)
{
// 不計(jì)算
}
如果總平均值小于閾值并且標(biāo)志被升起,則將標(biāo)志放下。
if (totave[a] < 閾值 && flag == 1)
{
標(biāo)志 = 0;
}
在串行監(jiān)視器和 LCD 上打印步數(shù)。
Serial.println(步驟);
lcd.print("步驟:");
lcd.print(步驟);
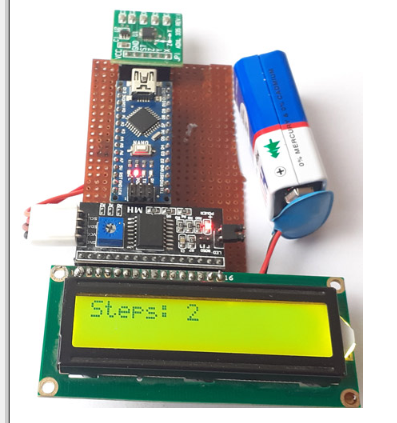
測(cè)試 Arduino 計(jì)步器
準(zhǔn)備好硬件和代碼后,將 Arduino 連接到筆記本電腦并上傳代碼。現(xiàn)在拿起你手中的計(jì)步器,開(kāi)始一步一步地走,它應(yīng)該會(huì)在 LCD 上顯示步數(shù)。有時(shí),當(dāng)計(jì)步器振動(dòng)非常快或非常慢時(shí),它會(huì)增加步數(shù)。
#include
LiquidCrystal_I2C lcd(0x27, 16, 2);
常量 int xpin = A1;
常量 int ypin = A2;
常量 int zpin = A3;
字節(jié) p[8] = {
0x1F,
0x1F,
0x1F,
0x1F,
0x1F,
0x1F,
0x1F,
0x1F
};
浮動(dòng)xavg,yavg,zavg;
整數(shù)步,標(biāo)志 = 0;
無(wú)效設(shè)置()
{
序列.開(kāi)始(9600);
液晶顯示器開(kāi)始();
液晶背光();
lcd.clear();
校準(zhǔn)();
無(wú)效循環(huán)(
)
{
for (int w = 0; w < 16; w++) {
lcd.write(byte(0));
延遲(500);
}
int acc = 0;
浮動(dòng) totvect?= {0};
浮點(diǎn)數(shù)?= {0};
浮動(dòng) xaccl?= {0};
浮動(dòng) yaccl?= {0};
浮動(dòng) zaccl?= {0};
for (int a = 0; a < 100; a++)
{
xaccl[a] = float(analogRead(xpin) - 345);
延遲(1);
yaccl[a] = float(analogRead(ypin) - 346);
延遲(1);
zaccl[a] = float(analogRead(zpin) - 416);
延遲(1);
totvect[a] = sqrt(((xaccl[a] - xavg) * (xaccl[a] - xavg)) + ((yaccl[a] - yavg) * (yaccl[a] - yavg)) + ((zval [a] - zavg) * (zval[a] - zavg)));
totave[a] = (totvect[a] + totvect[a - 1]) / 2 ;
Serial.println("totave[a]");
Serial.println(totave[a]);
延遲(100);
if (totave[a] > threshold && flag == 0)
{
步數(shù) = 步數(shù) + 1;
標(biāo)志 = 1;
}
else if (totave[a] > threshold && flag == 1)
{
// 不要計(jì)算
}
if (totave[a] < threshold && flag == 1)
{
flag = 0;
}
如果(步數(shù) < 0){
步數(shù) = 0;
}
Serial.println('\n');
Serial.print("步驟:");
Serial.println(步驟);
lcd.print(步驟);
延遲(1000);
lcd.clear();
}
延遲(1000);
}
void calibrate()
{
float sum = 0;
浮動(dòng)總和1 = 0;
浮動(dòng)總和2 = 0;
for (int i = 0; i < 100; i++) {
xval[i] = float(analogRead(xpin) - 345);
總和 = xval[i] + 總和;
}
延遲(100);
xavg =總和/ 100.0;
序列號(hào).println(xavg);
for (int j = 0; j < 100; j++)
{
yval[j] = float(analogRead(ypin) - 346);
sum1 = yval[j] + sum1;
}
yavg = sum1 / 100.0;
Serial.println(yavg);
延遲(100);
for (int q = 0; q < 100; q++)
{
zval[q] = float(analogRead(zpin) - 416);
sum2 = zval[q] + sum2;
}
zavg = sum2 / 100.0;
延遲(100);
Serial.println(zavg);
}
-
加速度計(jì)
+關(guān)注
關(guān)注
6文章
704瀏覽量
46023 -
計(jì)步器
+關(guān)注
關(guān)注
4文章
76瀏覽量
19982 -
Arduino
+關(guān)注
關(guān)注
188文章
6477瀏覽量
187816
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

用arduino和加速度計(jì)做一個(gè)重力感應(yīng)屏幕
加速度計(jì)的幻想與現(xiàn)實(shí)
2476-100加速度計(jì)
2460-010加速度計(jì)
2227-050加速度計(jì)模塊
1527J-010加速度計(jì)
設(shè)計(jì)具有成本效益的加速度計(jì)
通過(guò)單個(gè)加速度計(jì)增強(qiáng)計(jì)步器的性能

通過(guò)單個(gè)加速度計(jì)增強(qiáng)計(jì)步器的性能
選擇一個(gè)加速度計(jì)的技巧

使用單個(gè)加速度計(jì)設(shè)計(jì)準(zhǔn)確度高的計(jì)步器
MEMS加速度計(jì)的概念,MEMS加速度計(jì)的原理
加速度計(jì)的安裝方法分享
如何使用加速度計(jì)構(gòu)建一個(gè)基于Arduino的地震探測(cè)器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論