") 三種脈沖調制技術及其區(qū)別
三種脈沖調制技術及其區(qū)別
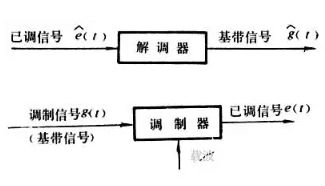
在通信系統(tǒng)中,調制是一個重要的步驟。調制是通過使用隨瞬時值變化的載波信號(高頻),在不改變其特性(如幅度、頻率、相位)的情況下,將消息信號(低頻基帶信號)從發(fā)射器傳輸到接收器的過程。低頻波通過保持其頻率和相位恒定。
調制技術分為兩種主要類型:模擬和數字(脈沖調制)。之前已經介紹過不同類型的調制技術,本文主要說說PAM、PWM和 PPM調制之間的區(qū)別差異。
脈沖幅度調制(PAM)
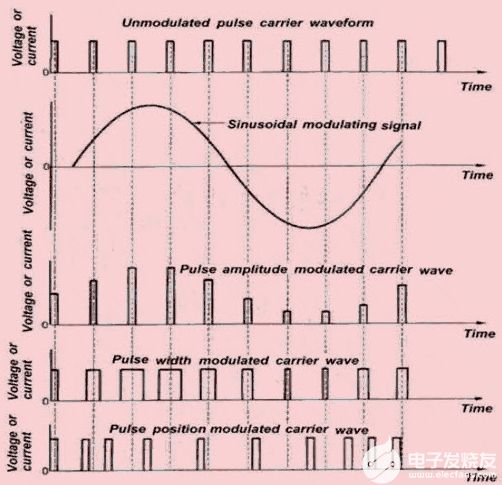
脈沖幅度調制主要是通過與模擬信號(信息信號)的瞬時值成比例地改變脈沖(載波信號)的幅度。
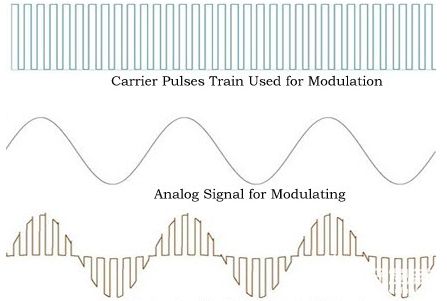
上圖說明了PAM技術的時域表示,它將模擬消息和脈沖幅度調制信號作為輸出。脈沖幅度調制用于流行的以太網通信標準。與其他種類的調制和解調技術相比,脈沖幅度調制器和解調器電路簡單。
目前脈沖幅度調制技術有兩類,一類是脈沖具有相同的極性,另一類是根據調制信號的幅度,脈沖可以同時具有正極性和負極性。
脈沖寬度調制(PWM)
脈沖寬度調制是通過與模擬信號(消息信號)的瞬時值成比例地改變脈沖寬度(載波信號)。
脈沖寬度變化,但脈沖幅度保持不變。限幅器用于使幅度恒定。這些電路將幅度限制到一個優(yōu)選的水平,因此噪聲是有限的。
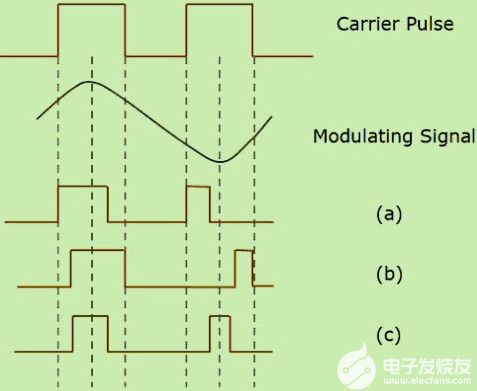
共有三種類型的脈沖寬度調制,分別是:
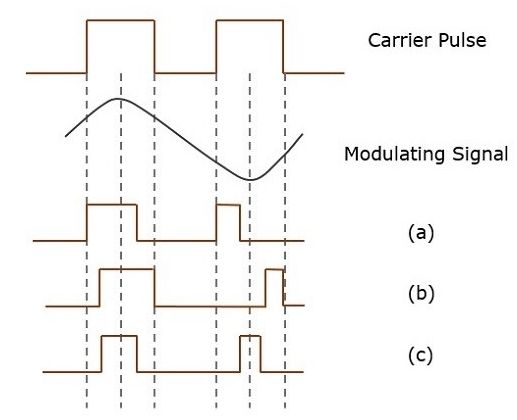
脈沖的前沿是恒定的,后沿根據消息信號而變化。
脈沖的后沿是恒定的,前沿根據消息信號而變化。
脈沖的中心是恒定的,前沿和后沿根據消息信號而變化。
脈沖位置調制(PPM)
脈沖位置調制是通過與模擬信號(消息信號)的瞬時值成比例地改變脈沖(載波信號)的位置。根據脈寬調制信號進行脈沖位置調制,脈沖寬度調制信號的每個尾隨都成為脈沖位置調制信號中脈沖的起點。
這些脈沖的位置與PWM脈沖的寬度成比例。但是,脈沖位置調制技術的主要缺點是,必須需要發(fā)射機和接收機之間的同步。
在上述所有情況下,檢測脈沖調制信號的信息并重建原始模擬信號。
PAM、PWM和PPM之間的區(qū)別
PAM、PWM和PPM之間的主要區(qū)別差異主要表現(xiàn)在以下幾個方面:

總結
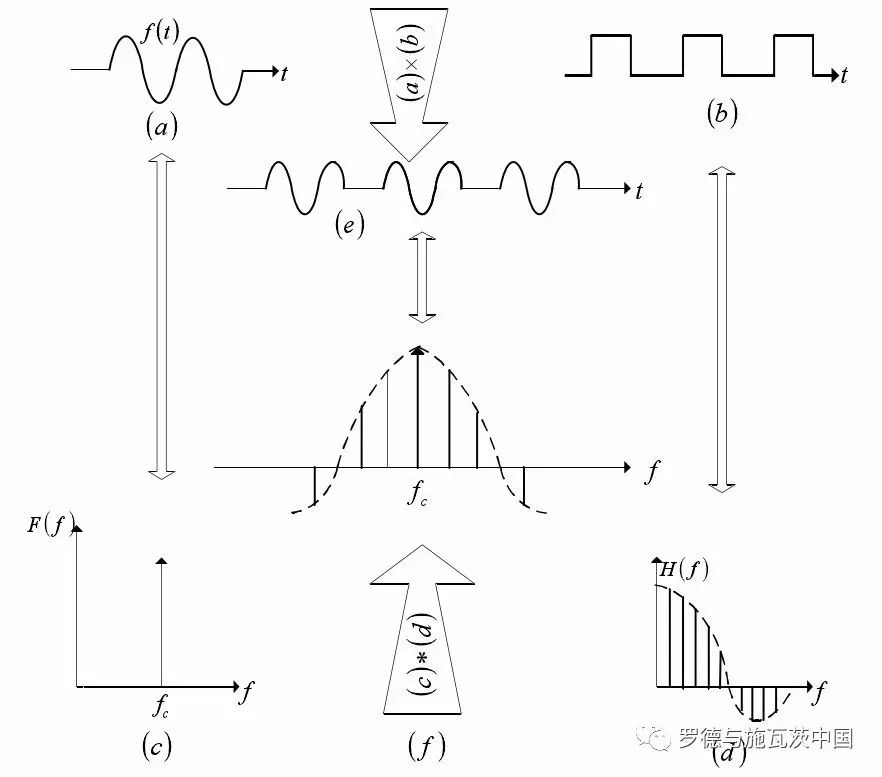
通常情況下,我們談論的調制技術是采用連續(xù)振蕩波形(正弦型信號)作為載波的,然而,正弦型信號并非是唯一的載波形式。在時間上離散的脈沖串,同樣可以作為載波,這時的調制是用基帶信號去改變脈沖的某些參數而達到的,人們常把這種調制稱為脈沖調制。
脈沖調制可以分為PAM、PWM和PPM三種技術,它們之間相互區(qū)別又有聯(lián)系,在實際電路應用中扮演著舉足輕重的作用。
-
PWM
+關注
關注
114文章
5198瀏覽量
214876 -
調制技術
+關注
關注
0文章
40瀏覽量
7880 -
PPM
+關注
關注
0文章
46瀏覽量
17071 -
PAM
+關注
關注
2文章
52瀏覽量
13443
發(fā)布評論請先 登錄
相關推薦
進行脈沖調制時的相位在脈沖調制輸出的每個脈沖中是否相同?
固態(tài)脈沖調制器設計與實現(xiàn)全面介紹
一種新型的固態(tài)高電壓多波形脈沖調制器
一種新型的全固態(tài)高電壓多波形脈沖調制器
關于脈沖調制信號相位噪聲的測試方法的分析和應用

PAM、PWM與PPM脈沖調制技術的區(qū)別
SOA光脈沖調制模塊簡介





 工商網監(jiān)
工商網監(jiān)
評論