 步進電機的噪音從何而來 如何使步進電機完全靜音
步進電機的噪音從何而來 如何使步進電機完全靜音
步進電機的噪音從何而來?
步進電機廣泛用于自動化、數字制造、醫療和光學設備等幾乎所有類型的移動應用中。
步進電機的優點是成本相對較低,在不使用變速箱的情況下在靜止和低速時具有高扭矩,以及對定位任務的固有適用性。與三相無刷電機和伺服驅動器相比,步進電機不一定需要復雜的控制算法或位置反饋來進行換向。
步進器的缺點是噪音很大,即使在低速或靜止時也是如此。步進電機有兩個主要的振動源:步進分辨率,以及斬波器和脈沖寬度調制 (PWM) 模式導致的副作用。
步進分辨率和微步
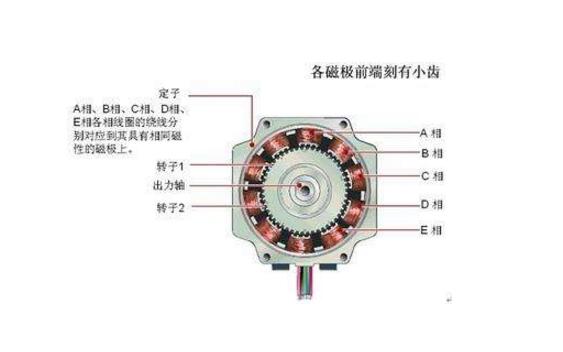
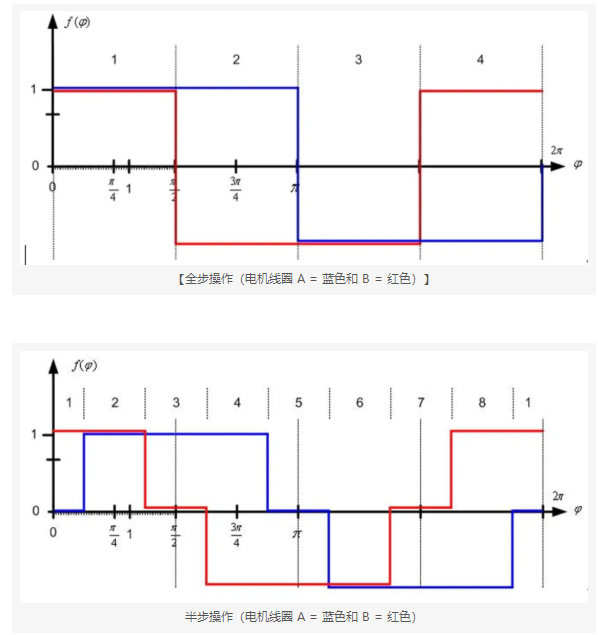
典型的步進電機有 50 個磁極,可實現 200 個完整步長,每個步距角為 1.8°,可實現 360° 的完整機械旋轉。但也有步數較少的步進電機,甚至高達 800 個全步。最初,這些電機用于全步或半步模式。施加在兩個電機線圈 A(藍色)和 B(紅色)上的電流矢量在整個電氣旋轉(電氣 360°)上顯示為矩形。如圖 3 和圖4 中突出顯示的那樣,電機線圈以 90° 相移模式以全電流或無電流供電。因此,每個周期的一電轉由 4 個整步或 8 個半步組成。也就是說,50 極步進電機需要 50 次電氣旋轉才能完成一整機械轉。
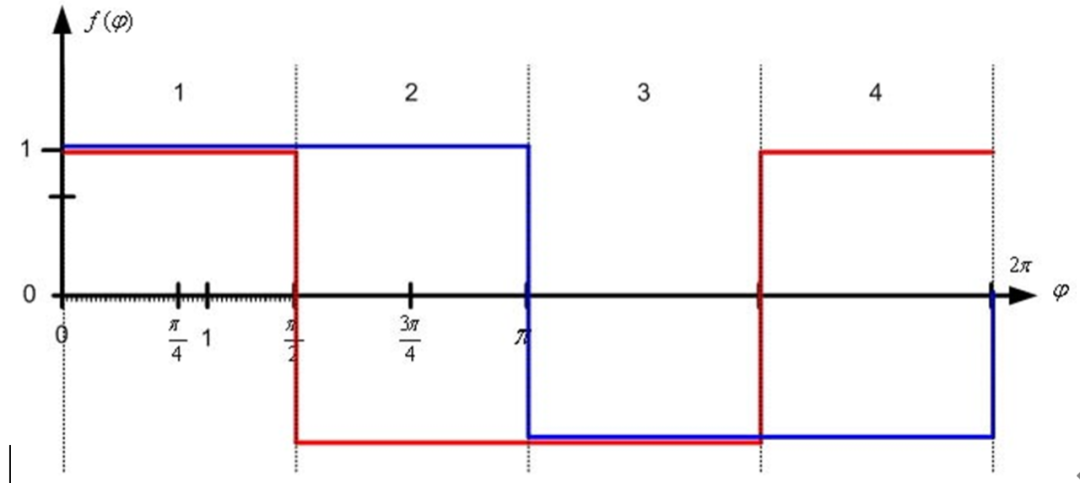
全步操作(電機線圈 A = 藍色和 B = 紅色)
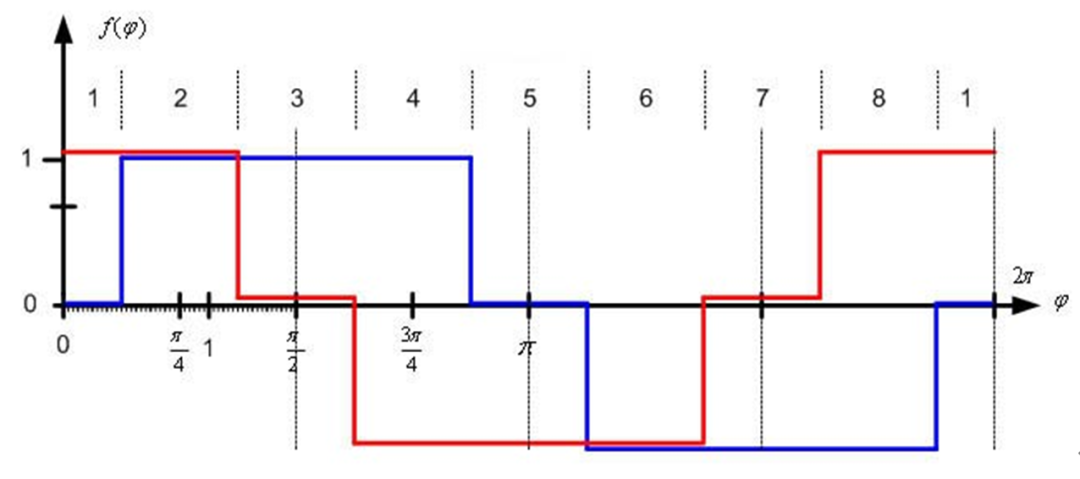
半步操作(電機線圈 A = 藍色和 B = 紅色)
全步或半步等低分辨率步進模式是步進電機的主要噪聲源。它們引入了巨大的振動,這種振動遍布系統的整個力學,特別是在低速和接近某些共振頻率時。在較高的速度下,由于慣性矩,這些影響會降低。
轉子可以想象成一個諧波振蕩器或彈簧擺,如圖 所示。在驅動器電子設備施加新的電流矢量后,轉子將沿著新指令位置的方向步進到下一個全步或半步位置。與脈沖響應類似,轉子過沖并圍繞下一個位置振蕩,從而導致機械振動和噪音。運動遠非平穩,尤其是在較低的速度下。
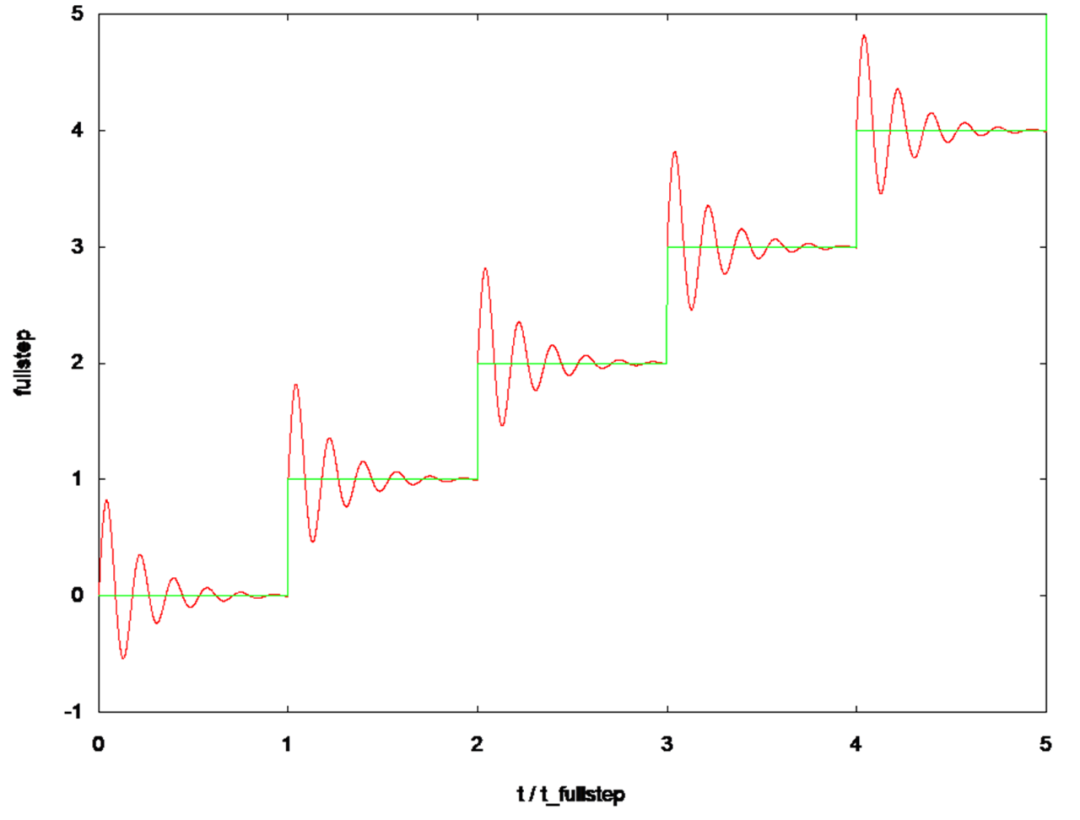
轉子的擺動行為導致振動
為了減少這些振蕩,可以應用一種稱為微步進的機制。這將一個完整的步驟分成更小的部分,或微步驟。典型分辨率為 2(半步)、4(四分之一步)、8、32 甚至更多微步。定子線圈不是以全電流或零電流供電,而是以中間電流水平接近完整的正弦波波形超過 4 個完整的步驟。這將永磁轉子定位在兩個后續完整步驟之間的中間位置。這甚至允許適應步進電機的物理特性或應用的特殊定制電流波形(TRINAMIC的驅動芯片支持該功能)。
微步進的最大分辨率由驅動器的 A/D 和 D/A 功能定義。Trinamic 的步進電機控制器和驅動器允許使用每整步高達 256(8 位)微步的步進電機,使用芯片的集成可配置正弦波表甚至完全自定義電流波形。
使用這種高微步分辨率的結果是電機轉子現在以更小的角度或更短的距離步進。當切換到新位置時,如圖 5 所示的過沖和下沖會大大減少。下圖 顯示了這種差異。
從全步分辨率切換到高微步分辨率時減少電機振動
斬波器和 PWM 模式
另一個噪聲和振動源源自步進電機通常使用的傳統斬波器和 PWM 模式。由于粗步進分辨率的主要影響,這些模式的寄生效應常常被忽略。但隨著使用微步進提高步進分辨率,這些寄生效應變得明顯甚至可以聽見。
經典的恒定關斷時間 PWM 斬波器模式是一種電流控制的 PWM 斬波器,它以快衰減和慢衰減相位之間的固定關系工作。在其最大值點,電流達到指定的目標電流,這導致平均電流低于所需的目標電流,如圖所示。
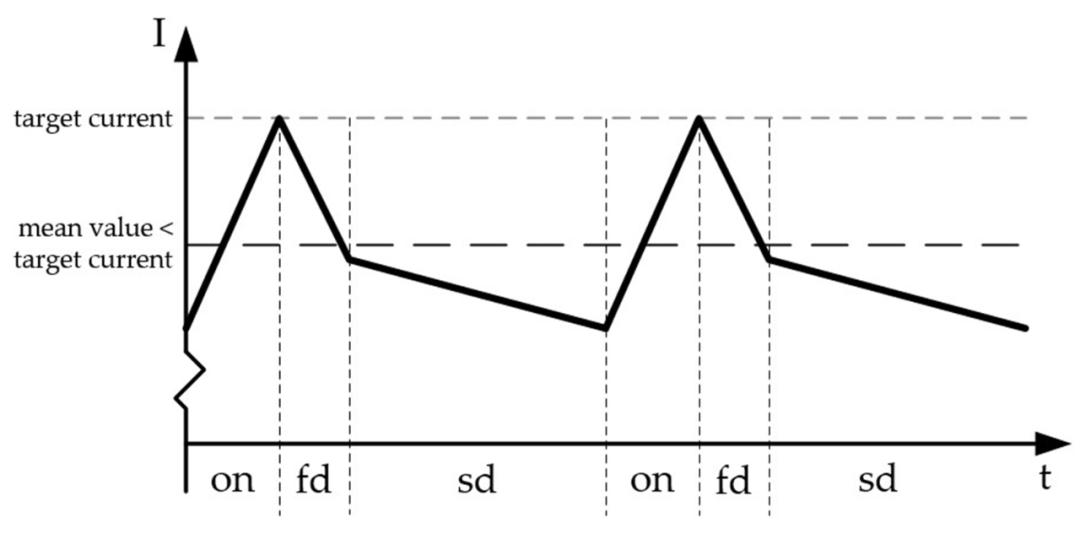
恒定關斷時間 (TOFF) PWM 斬波模式:平均電流達不到目標電流
在完整的電氣旋轉中,當電流的符號(方向)發生變化時,這會導致正弦波的過零區域周圍出現一個平臺。這個平臺的影響是電機繞組中電流為零的一小段時間,這意味著根本沒有扭矩。這會導致擺動和振動,尤其是在較低的速度下。
具有經典關斷時間斬波器模式的過零平臺
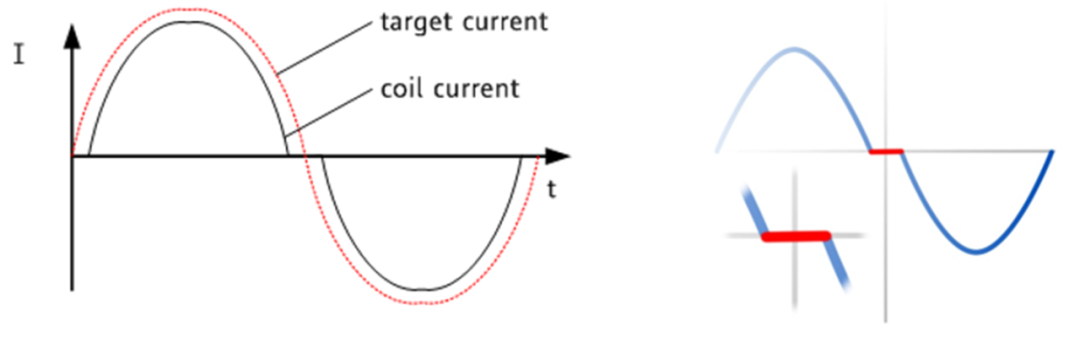
與恒定關斷時間斬波器相比,Trinamic 的 SpreadCycle? PWM 斬波器模式應用采用磁滯功能,自動使用慢速和快速衰減周期之間的擬合關系。平均電流反映了配置的標稱電流。在正弦波的過零區域沒有平臺。這減少了電流和轉矩脈動,并接近了真正的正弦波形,與恒定關斷時間的 PWM 斬波器相比,電機運行更加平穩。這在靜止和慢速到中等速度時尤其重要。
具有平滑過零的SpreadCycle 磁滯斬波器
TMC5130A-TA 是一款包含 StealthChop 模式的小型智能步進電機驅動器和控制器 IC。除了 StealthChop 之外,Trinamic 還改進了電壓模式操作并將其與電流控制相結合。為了最大限度地減少電流波動,TMC5130A-TA 芯片的驅動器根據電流反饋調節電壓調制。這允許系統根據電機參數和工作電壓進行自我調整。
如何使步進電機完全靜音?
盡管微步減少了由低步分辨率引起的大部分振動,但高微步分辨率可以更容易地感知其他振動源。先進的電流控制 PWM 斬波器模式,如 Trinamic 的 SpreadCycle? 算法,在硬件中實現,在很大程度上減少了振動和抖動。這對于許多標準應用來說已經足夠了,也非常適合高速應用。
但即使使用像SpreadCycle這樣的電流控制斬波器模式,由于電機線圈不同步、檢測電阻上幾毫伏的調節噪聲和PWM抖動,仍然會產生一點點可聽噪聲和振動。這種噪音和振動對于高端應用、低速到中速應用以及任何噪音無法接受的應用至關重要。對于 Dereneville DTT-01-S 線性跟蹤唱臂來說,這是無法忍受的,因為來自微步進驅動器和混合步進器的噪聲會疊加在音頻信號上,尤其是在各個音軌之間過渡的普通凹槽內。
Trinamic 的 StealthChop? 算法 [4] 也在硬件中實現,最終使步進電機靜音。但是 StealthChop 實際上如何對電機實現靜音,為什么它不會產生額外的噪音和振動?與基于電流的斬波器模式(如 SpreadCycle)相比,StealthChop 采用了不同的方法:它是一種基于電壓斬波器的技術,負責 Dereneville DTT-01-S 唱臂和唱針的無噪音和平穩移動。結合閉環跟蹤角度調節和精密激光光學,這使得頭殼和測針的最大跟蹤角度誤差<0.05°。良好的傳統樞軸唱臂具有<2°-3°的典型跟蹤角誤差,并且還受到滑行力和凹槽的機械磨損的影響。
TMC5130A-TA 是一款包含 StealthChop 模式的小型智能步進電機驅動器和控制器 IC,是這款卓越模擬唱機的終極解決方案。除了 StealthChop 之外,Trinamic 還改進了電壓模式操作并將其與電流控制相結合。為了最大限度地減少電流波動,TMC5130A-TA 芯片的驅動器根據電流反饋調節電壓調制。這允許系統根據電機參數和工作電壓進行自我調整。
消除了由直流控制環路的調節算法引起的小振蕩。由于SpreadCycle 和其他電流調節斬波器原理總是對線圈電流測量做出逐個周期的反應,因此復雜系統中總是存在幾毫伏的噪聲,以及內部兩個線圈之間的電磁耦合。導致產生的電機電流的微小變化,從而影響斬波器。
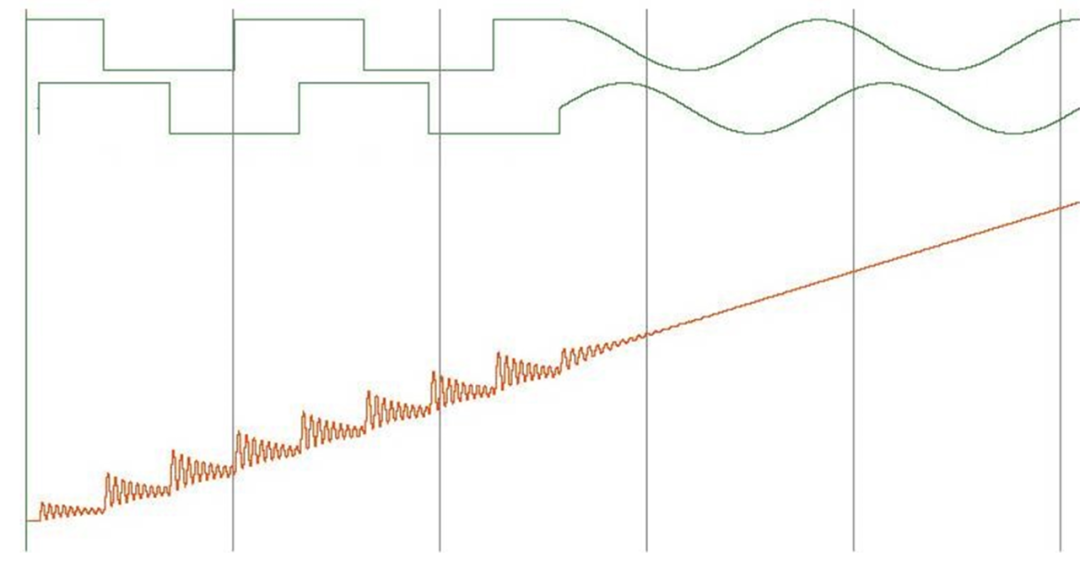
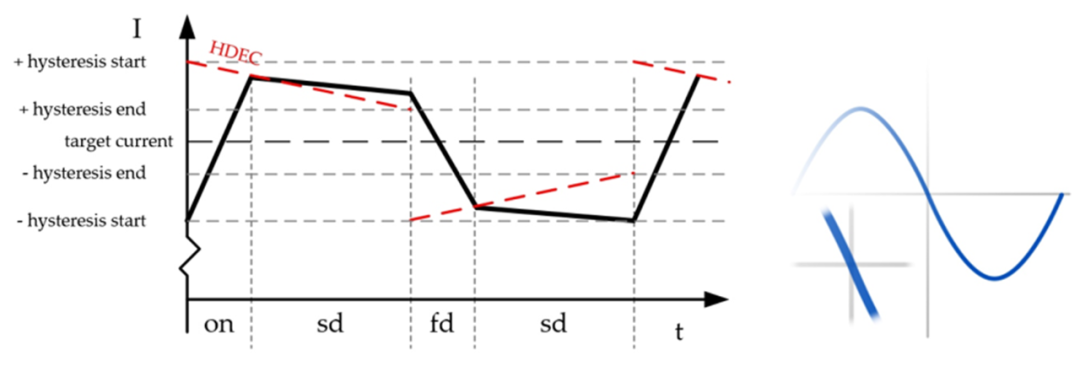
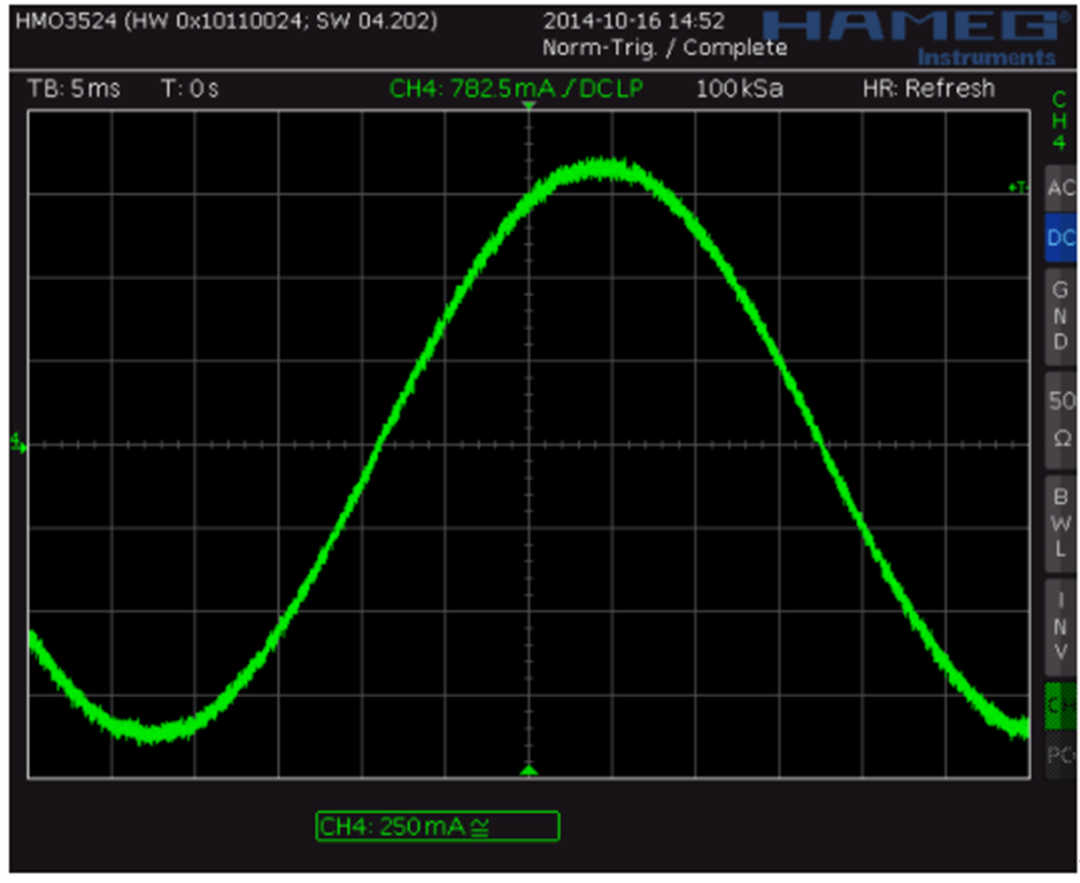
下圖比較了電壓控制的 StealthChop 和電流控制的 SpreadCycle。StealthChop 的過零行為是完美的:當電流值的符號從正變為負或反之亦然時,沒有平臺,而是零電流水平的直線交叉,因為電流是基于調制的 PWM 占空比。在 50% PWM 占空比下,電流實際上為零。
具有電壓控制 StealthChop? 斬波器模式的一個電機相位的正弦波
具有電流控制的 SpreadCycle? 斬波器模式的一個電機相位的正弦波
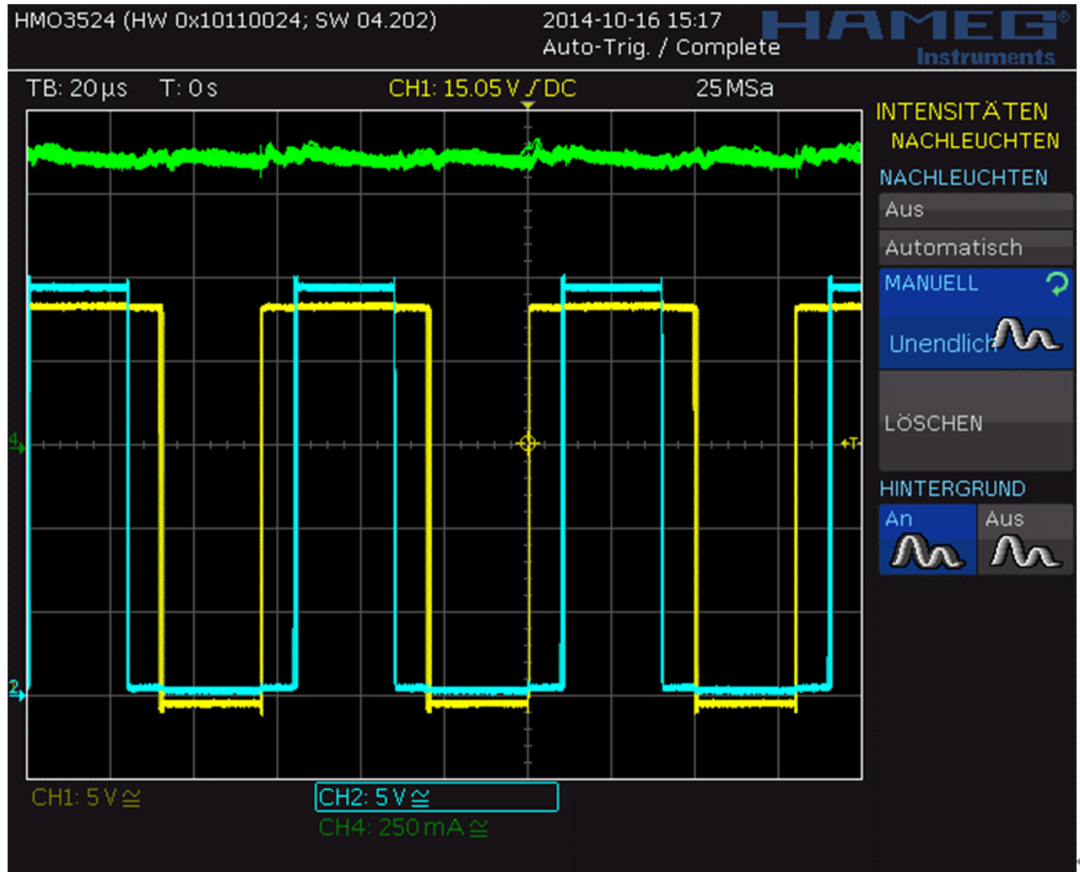
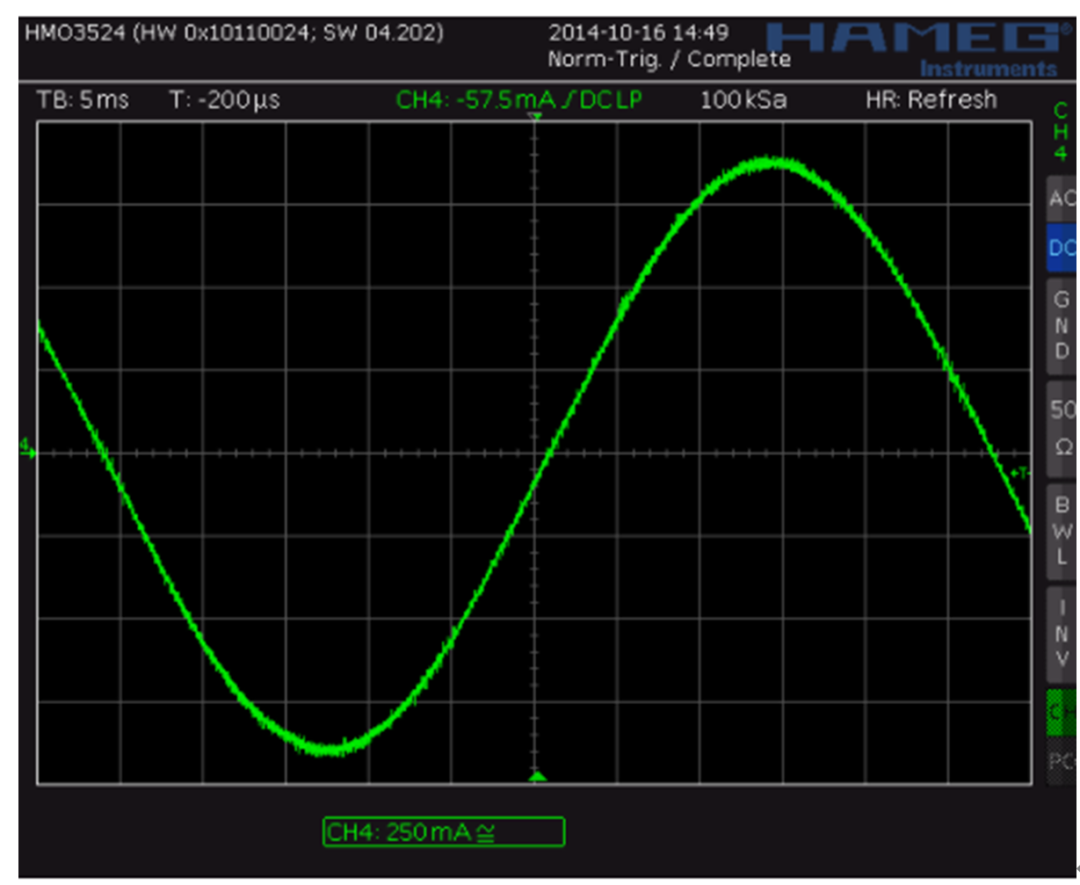
電壓控制的StealthChop?斬波模式下電機相位和線圈電流的放大PWM視圖
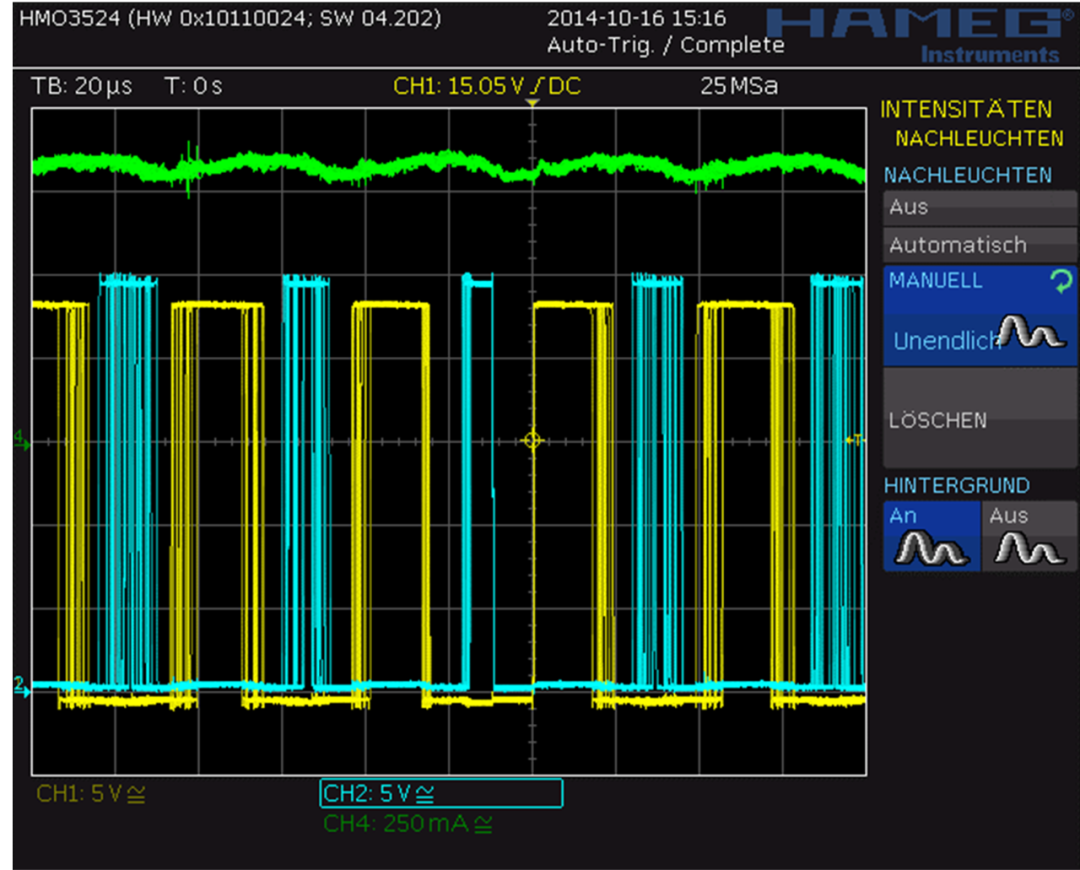
電流控制的SpreadCycle?斬波模式下電機相位和線圈電流的放大PWM視圖
配備 StealthChop 的電機驅動器結合了與模擬非常相似的電流波形 - 這在某種程度上非常適合 Dereneville 模擬卡座的應用 - 在不增加成本的情況下對功耗進行了一些小幅改進。結果是耳語般安靜的運動。除了無法改變的滾珠軸承噪音外,StealthChop 提供了異常安靜的步進電機性能。使用 StealthChop 的應用已實現低于經典電流控制 10dB 的噪聲水平。正如我們從物理學中所知道的,-3dB 的變化代表大約一半的噪音或聲級降低。
步進電機發生了哪些變化?
今天的步進電機與多年來一直使用的執行器一樣具有成本效益。它們仍然由相同的機器使用相同的工藝和材料制造和組裝。甚至它們的一般操作模式都是相同的。
但與過去使用更簡單的控制器單元驅動它們相比,這些電機的真正潛力現在可以通過更先進的算法和高度集成的微電子技術來釋放。直接在電機驅動器電子設備處或內部的集成智能本地回路,在執行器處或附近就地收集和測量信息,這是他們唯一可用的地方,并直接在驅動程序中實時處理這些信息。StealthChop 就是一個很好的例子,因為它的算法與 PWM 斬波器密切相關。
此外,信息可以反饋到更高的應用級控制器。傳統的步進驅動器解決方案主要只在一個方向上工作,即僅僅向下驅動電機。Trinamic 的所有智能步進電機驅動器解決方案都支持通過快速、先進的接口進行雙向通信。這些接口還可以監控不同種類的狀態和診斷信息,例如,這些信息又可以在應用層程序級別上使用,以提高性能、效率或可靠性。
新一代的運動和電機控制解決方案也將更高的應用級控制器從計算密集型、實時或重復性任務中解脫出來,減輕上位機的負擔,這些任務不一定屬于實際應用級,但需要驅動和控制電機;減少應用程序開發時間和精力;甚至減少整體 PCB 面積和物料清單 (BOM)。這些智能微電子設備中提供了很大一部分實時運動控制功能。例如運動曲線計算、編碼器接口和末端開關檢測。
所有這一切都提高了抽象級別,并使電機和運動控制成為具有最高質量的即用型構建塊——但仍然使用相同的“舊”步進電機。
總結與結論
半導體制造設備、醫療應用和實驗室自動化中的晶圓處理。對于低噪音和低振動,它們都有相似的性能要求。此外,到目前為止,還有其他應用對噪音、振動和運動質量的要求較低,這些應用可以通過這項技術得到顯著改善。也有越來越多的新興嵌入式應用程序實際上只有通過這種智能解決方案才能成為可能 - 從定性和定量的角度來看。其中包括,例如,3D 打印和桌面制造應用 、無法接受可聽噪聲的高級個人醫療設備、相機滑軌以及高級閉路電視和監控攝像頭。TMC5130A 系列終極步進電機驅動器和控制器反映了運動控制的大趨勢。
-
電機驅動
+關注
關注
60文章
1227瀏覽量
86937 -
步進電機
+關注
關注
151文章
3120瀏覽量
147846 -
運動控制
+關注
關注
4文章
588瀏覽量
32982 -
TMC
+關注
關注
0文章
36瀏覽量
17264
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論