") 基于結(jié)構(gòu)化建模的矢量高精地圖實(shí)時(shí)在線構(gòu)建方法—MapTR
基于結(jié)構(gòu)化建模的矢量高精地圖實(shí)時(shí)在線構(gòu)建方法—MapTR
摘要: 矢量高精地圖能為決策規(guī)劃、軌跡預(yù)測(cè)、環(huán)境感知提供重要的高層級(jí)語(yǔ)義信息,是自動(dòng)駕駛系統(tǒng)中不可或缺的部分。地平線聯(lián)合華中科技大學(xué)Vision Lab提出基于結(jié)構(gòu)化建模的矢量高精地圖實(shí)時(shí)在線構(gòu)建方法——MapTR。MapTR僅依靠車載環(huán)視相機(jī)數(shù)據(jù),輸出自車周圍各類地圖要素的結(jié)構(gòu)化表示,能夠?qū)崿F(xiàn)實(shí)時(shí)的高質(zhì)量的在線地圖構(gòu)建。MapTR展現(xiàn)了在線建圖方案的潛力,具有很高的應(yīng)用價(jià)值,有助于推動(dòng)自動(dòng)駕駛技術(shù)的發(fā)展。
晴天&陰天
?
雨天

夜晚
藍(lán)色-pedestrian crossing,黃色-lane divider,綠色-road boundary
圖1 MapTR在多樣而復(fù)雜的駕駛場(chǎng)景中都能穩(wěn)定地構(gòu)建高質(zhì)量的矢量地圖
背景
矢量高精地圖(vectorized high-definition map)是應(yīng)用于自動(dòng)駕駛的高精度結(jié)構(gòu)化電子地圖,其由駕駛場(chǎng)景各類地圖要素(如人行橫道、車道線、路沿等)的矢量化表示構(gòu)成,為決策規(guī)劃、軌跡預(yù)測(cè)、環(huán)境感知提供重要的高層級(jí)語(yǔ)義信息。
以往的高精地圖通常以離線的方式構(gòu)建,即利用地圖采集車的車載傳感器(激光雷達(dá)、相機(jī)、慣導(dǎo)等)采集場(chǎng)景數(shù)據(jù),并通過(guò)自動(dòng)化和人工相結(jié)合的方式對(duì)數(shù)據(jù)進(jìn)行處理和矢量化語(yǔ)義標(biāo)注。離線建圖的主要挑戰(zhàn)在于:1)采集、處理和標(biāo)注都需要大量的人力和時(shí)間成本,且流程繁瑣;2)道路信息動(dòng)態(tài)變化,離線構(gòu)建的地圖時(shí)效性差,需要高頻更新來(lái)保證地圖的準(zhǔn)確性;3)考慮到信息安全,離線地圖無(wú)法覆蓋到保密要求高的區(qū)域;4)當(dāng)拓展到大規(guī)模大范圍的高精地圖應(yīng)用時(shí),離線建圖在人力、時(shí)間和維護(hù)成本上的問(wèn)題將更加凸顯。
在線建圖是指在自動(dòng)駕駛車輛行駛過(guò)程中利用車載傳感器實(shí)時(shí)地感知自車周圍的地圖要素并生成地圖。在線建圖無(wú)需人工處理、標(biāo)注和維護(hù),相比離線建圖,成本低,可拓展性強(qiáng),易用性強(qiáng)。然而,目前的在線建圖方法在建圖質(zhì)量和建圖速度兩方面都難以達(dá)到自動(dòng)駕駛實(shí)際應(yīng)用的要求。高質(zhì)量高效率在線建圖成為了業(yè)界亟待解決的技術(shù)難題。
針對(duì)這一問(wèn)題,地平線聯(lián)合華中科技大學(xué)Vision Lab提出了基于結(jié)構(gòu)化建模的矢量高精地圖實(shí)時(shí)在線構(gòu)建方法——MapTR。MapTR通過(guò)對(duì)地圖要素的結(jié)構(gòu)化建模消除表示上的歧義性,降低地圖要素的復(fù)雜度和學(xué)習(xí)難度,并且采用端到端的結(jié)構(gòu)化框架高效地生成矢量高精地圖。MapTR在nuScenes數(shù)據(jù)集上達(dá)到了最好的建圖質(zhì)量和實(shí)時(shí)的運(yùn)行速度。豐富的可視化結(jié)果表明(如圖一),MapTR在多樣而復(fù)雜的駕駛場(chǎng)景中都能穩(wěn)定地構(gòu)建高質(zhì)量的矢量地圖。MapTR展現(xiàn)了在線建圖方案的潛力,具有很高的應(yīng)用價(jià)值和落地前景,有助于推動(dòng)自動(dòng)駕駛技術(shù)的發(fā)展。
地圖要素結(jié)構(gòu)化建模
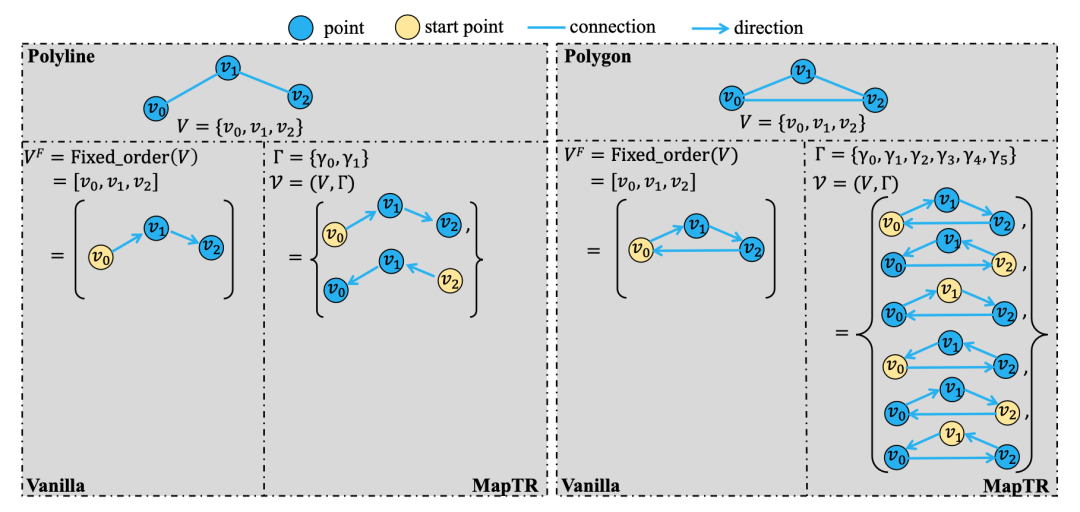 圖二? 地圖要素結(jié)構(gòu)化建模 ? MapTR提出了新穎的結(jié)構(gòu)化建模方式。基于幾何先驗(yàn),MapTR將開環(huán)地圖要素(如車道線)離散化為polyline(多段線),將閉環(huán)地圖要素(如人行橫道)離散化為polygon(多邊形)。Polyline和polygon都可以用以某種順序排列的若干節(jié)點(diǎn)統(tǒng)一地表示。通過(guò)等間隔采樣可以確定節(jié)點(diǎn),但節(jié)點(diǎn)的排列方式難以明確定義和表示,同一拓?fù)浣Y(jié)構(gòu)可以對(duì)應(yīng)于多種等效的節(jié)點(diǎn)排列方式。? 具體而言,對(duì)于polyline,如圖二(左),存在2種等效的節(jié)點(diǎn)排列方式,對(duì)應(yīng)于兩種相反的連接節(jié)點(diǎn)的順序。對(duì)于polygon,如圖二(右),存在??種等效的節(jié)點(diǎn)排列方式(??為節(jié)點(diǎn)數(shù)量),任一節(jié)點(diǎn)都可以作為起始點(diǎn),且存在兩種相反的連接順序。為了消除表示上的歧義性且準(zhǔn)確地描述節(jié)點(diǎn)之間的排列方式(連接關(guān)系),MapTR引入等效排列集合的概念,所有等效的節(jié)點(diǎn)排列方式構(gòu)成的集合作為等效排列集合。 ? MapTR將地圖要素統(tǒng)一地建模為節(jié)點(diǎn)點(diǎn)集??和關(guān)于節(jié)點(diǎn)的等效排列集合??,節(jié)點(diǎn)點(diǎn)集??用于描述地圖要素關(guān)鍵點(diǎn)的位置信息,等效排列集合??包含了節(jié)點(diǎn)之間所有的等效的連接關(guān)系, 用于描述地圖要素的拓?fù)浣Y(jié)構(gòu)。節(jié)點(diǎn)點(diǎn)集和等效排列集合??構(gòu)成了地圖要素的結(jié)構(gòu)化表示??。
圖二? 地圖要素結(jié)構(gòu)化建模 ? MapTR提出了新穎的結(jié)構(gòu)化建模方式。基于幾何先驗(yàn),MapTR將開環(huán)地圖要素(如車道線)離散化為polyline(多段線),將閉環(huán)地圖要素(如人行橫道)離散化為polygon(多邊形)。Polyline和polygon都可以用以某種順序排列的若干節(jié)點(diǎn)統(tǒng)一地表示。通過(guò)等間隔采樣可以確定節(jié)點(diǎn),但節(jié)點(diǎn)的排列方式難以明確定義和表示,同一拓?fù)浣Y(jié)構(gòu)可以對(duì)應(yīng)于多種等效的節(jié)點(diǎn)排列方式。? 具體而言,對(duì)于polyline,如圖二(左),存在2種等效的節(jié)點(diǎn)排列方式,對(duì)應(yīng)于兩種相反的連接節(jié)點(diǎn)的順序。對(duì)于polygon,如圖二(右),存在??種等效的節(jié)點(diǎn)排列方式(??為節(jié)點(diǎn)數(shù)量),任一節(jié)點(diǎn)都可以作為起始點(diǎn),且存在兩種相反的連接順序。為了消除表示上的歧義性且準(zhǔn)確地描述節(jié)點(diǎn)之間的排列方式(連接關(guān)系),MapTR引入等效排列集合的概念,所有等效的節(jié)點(diǎn)排列方式構(gòu)成的集合作為等效排列集合。 ? MapTR將地圖要素統(tǒng)一地建模為節(jié)點(diǎn)點(diǎn)集??和關(guān)于節(jié)點(diǎn)的等效排列集合??,節(jié)點(diǎn)點(diǎn)集??用于描述地圖要素關(guān)鍵點(diǎn)的位置信息,等效排列集合??包含了節(jié)點(diǎn)之間所有的等效的連接關(guān)系, 用于描述地圖要素的拓?fù)浣Y(jié)構(gòu)。節(jié)點(diǎn)點(diǎn)集和等效排列集合??構(gòu)成了地圖要素的結(jié)構(gòu)化表示??。
端到端訓(xùn)練
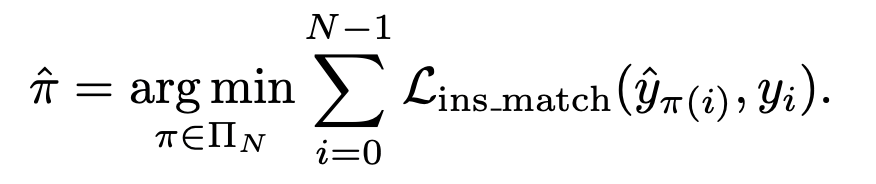
在結(jié)構(gòu)化建模的基礎(chǔ)上,MapTR采用了基于DETR[1]的set prediction的方式進(jìn)行端到端訓(xùn)練。MapTR引入分層級(jí)匹配機(jī)制進(jìn)行標(biāo)簽分配,即實(shí)例級(jí)匹配(instance-level matching)和節(jié)點(diǎn)級(jí)匹配(point-level matching)。 實(shí)例級(jí)匹配:在預(yù)測(cè)的地圖要素和真實(shí)的地圖要素之間找到最優(yōu)的一一對(duì)應(yīng)關(guān)系,匹配的依據(jù)為地圖要素之間的類別相關(guān)性和位置相關(guān)性:
 ? 節(jié)點(diǎn)級(jí)匹配:對(duì)于每一個(gè)地圖要素,從等效排列集合中找到最優(yōu)的排列,使得預(yù)測(cè)的節(jié)點(diǎn)和真實(shí)的節(jié)點(diǎn)一一對(duì)應(yīng)且點(diǎn)對(duì)之間的距離之和最小:
? 節(jié)點(diǎn)級(jí)匹配:對(duì)于每一個(gè)地圖要素,從等效排列集合中找到最優(yōu)的排列,使得預(yù)測(cè)的節(jié)點(diǎn)和真實(shí)的節(jié)點(diǎn)一一對(duì)應(yīng)且點(diǎn)對(duì)之間的距離之和最小:

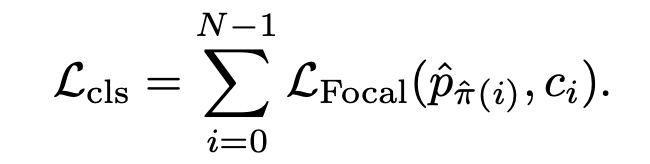
損失函數(shù):根據(jù)分層級(jí)匹配的結(jié)果,損失函數(shù)由classification loss,point2point loss和edge direction loss組成:

Classification loss根據(jù)實(shí)例級(jí)匹配的結(jié)果對(duì)地圖要素的類別預(yù)測(cè)進(jìn)行約束:
Point2point loss根據(jù)節(jié)點(diǎn)級(jí)匹配的結(jié)果,對(duì)匹配的點(diǎn)對(duì)之間的位置關(guān)系進(jìn)行約束:

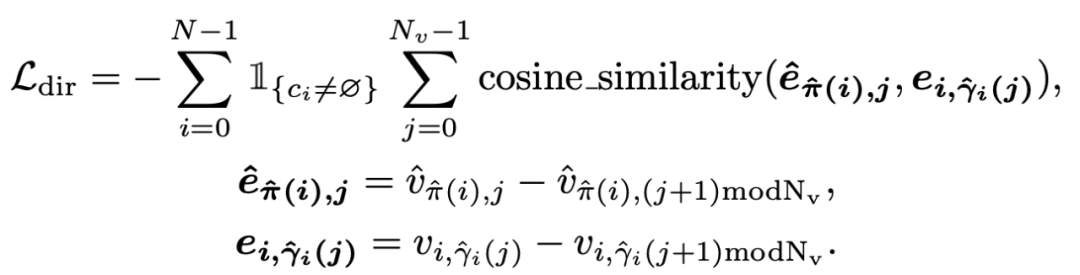
Edge direction loss對(duì)預(yù)測(cè)的edge和真實(shí)的edge的方向一致性進(jìn)行約束:
結(jié)構(gòu)化建圖框架
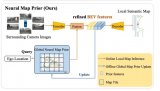
在結(jié)構(gòu)化建模的基礎(chǔ)上,MapTR采用了結(jié)構(gòu)化框架端到端地輸出場(chǎng)景內(nèi)所有地圖要素的結(jié)構(gòu)化表示,無(wú)需后處理。圖三為MapTR的整體框架。MapTR以車載相機(jī)組實(shí)時(shí)采集的圖像數(shù)據(jù)作為輸入。Map Encoder對(duì)原始圖像提取語(yǔ)義特征,并通過(guò)2D-to-BEV變換方法(如GKT[2]、IPM[3]、Deformable Attention[4]、LSS[5]),將2D特征圖轉(zhuǎn)換為統(tǒng)一的BEV(bird’s eye view)特征圖。Map Decoder采用了分層級(jí)的query embedding機(jī)制結(jié)構(gòu)化地編碼地圖要素的信息。分層級(jí)query和BEV特征圖進(jìn)行交互,并且 query之間進(jìn)行實(shí)例內(nèi)和實(shí)例間的交互。分層級(jí)query迭代地更新,最終輸出地圖要素的語(yǔ)義類別和節(jié)點(diǎn)位置。
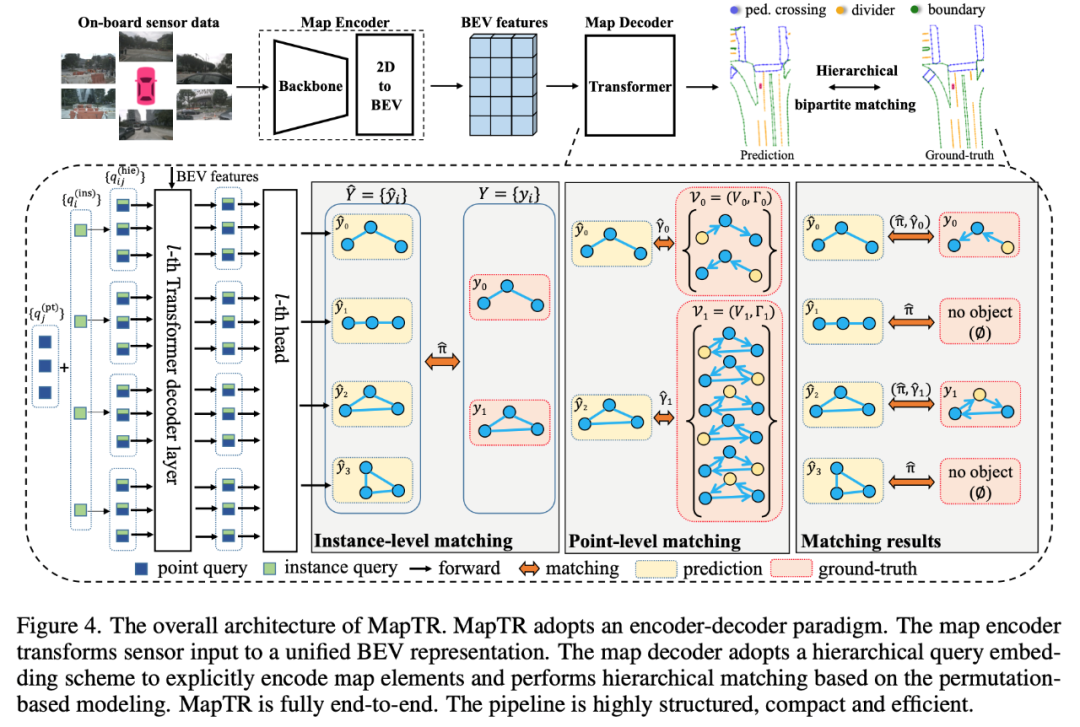
圖三 結(jié)構(gòu)化建圖框架
實(shí)驗(yàn)
圖四展示了在nuScenes數(shù)據(jù)集上MapTR與其他在線建圖方法(HDMapNet[1]和VectorMapNet[2])的對(duì)比,MapTR在建圖速度和建圖質(zhì)量?jī)煞矫娑加忻黠@的優(yōu)勢(shì)。MapTR-nano達(dá)到了實(shí)時(shí)的推理速度(25.1FPS),8倍快于其他視覺(jué)方法,并且建圖質(zhì)量更高(+3.3mAP)。MapTR-tiny達(dá)到了遠(yuǎn)好于多模態(tài)方法的建圖質(zhì)量(+13.5mAP)并且仍有3倍的速度優(yōu)勢(shì)。 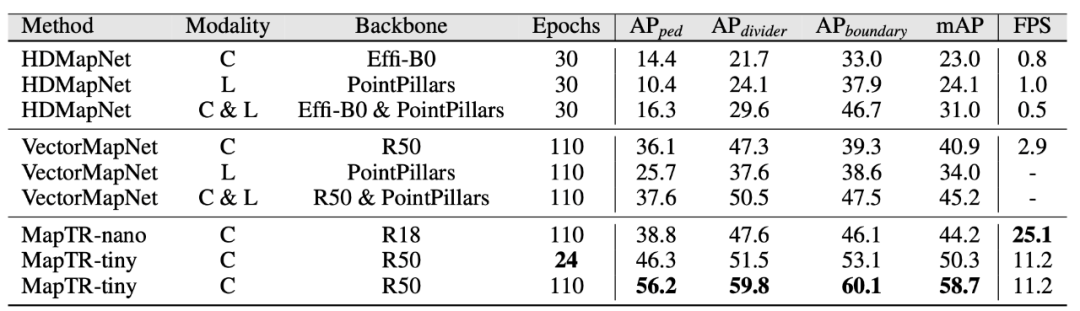
圖四 與其他在線建圖方法的對(duì)比
圖五是關(guān)于建模方式的消融實(shí)驗(yàn)。相比于把地圖要素建模為排列固定且唯一的序列點(diǎn)集,基于等效排列概念的結(jié)構(gòu)化建模極大地簡(jiǎn)化了地圖要素的學(xué)習(xí)難度,并且顯著提高了建圖質(zhì)量。

圖五 關(guān)于建模方式的消融實(shí)驗(yàn) 圖六是關(guān)于2D-to-BEV變換方法的消融實(shí)驗(yàn)。MapTR能夠兼容各種2D-to-BEV變換方法,并且基于多種方法都能取得穩(wěn)定的建圖速度和質(zhì)量。
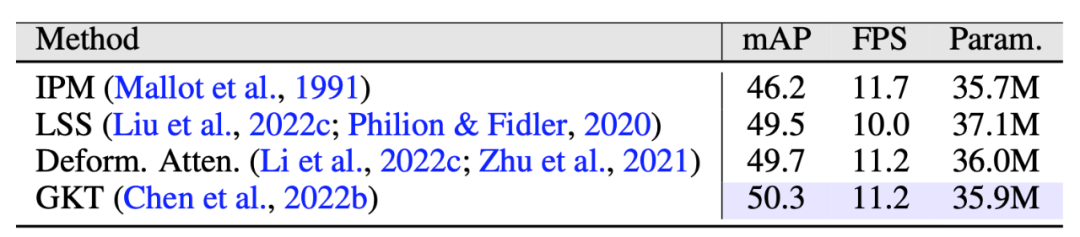
圖六 關(guān)于2D-to-BEV變換方法的消融實(shí)驗(yàn)
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7139瀏覽量
89573 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13930瀏覽量
167002 -
地平線
+關(guān)注
關(guān)注
0文章
354瀏覽量
15028
原文標(biāo)題:學(xué)術(shù)前線 | MapTR:基于結(jié)構(gòu)化建模的矢量高精地圖實(shí)時(shí)在線構(gòu)建方法
文章出處:【微信號(hào):horizonrobotics,微信公眾號(hào):地平線HorizonRobotics】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
結(jié)構(gòu)化布線系統(tǒng)有哪些難題
TrustZone結(jié)構(gòu)化消息是什么?
怎么實(shí)現(xiàn)基于結(jié)構(gòu)化方法的無(wú)線傳感器網(wǎng)絡(luò)設(shè)計(jì)?
結(jié)構(gòu)化設(shè)計(jì)分為哪幾部分?結(jié)構(gòu)化設(shè)計(jì)的要求有哪些
軟件工程中結(jié)構(gòu)化設(shè)計(jì)方法探究
中文商品屬性結(jié)構(gòu)化方法
高精地圖在無(wú)人駕駛領(lǐng)域的作用,高精地圖與普通導(dǎo)航地圖的區(qū)別

高德和整車廠合作,拿下國(guó)內(nèi)首個(gè)高精地圖訂單
高德與吉利在高精地圖領(lǐng)域達(dá)成全面合作
自動(dòng)駕駛語(yǔ)義高精地圖的層級(jí)實(shí)現(xiàn)
豐田展示一款路面高精地圖 將大幅降低高精地圖的構(gòu)建和維護(hù)成本
為什么需要去除高精地圖?
一種全新的視角去理解和處理地圖矢量化的任務(wù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論