") 大數(shù)據(jù)下數(shù)模聯(lián)動的隨機(jī)退化設(shè)備剩余壽命預(yù)測技術(shù)(部分)
大數(shù)據(jù)下數(shù)模聯(lián)動的隨機(jī)退化設(shè)備剩余壽命預(yù)測技術(shù)(部分)
源自:自動化學(xué)報作者:李天梅 司小勝 劉翔 裴洪
摘要
面向大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命(Remaining useful life, RUL)預(yù)測的現(xiàn)實(shí)需求, 結(jié)合隨機(jī)退化設(shè)備監(jiān)測大數(shù)據(jù)特點(diǎn)及剩余壽命預(yù)測不確定性量化這一核心問題, 深入分析了機(jī)理模型與數(shù)據(jù)混合驅(qū)動的剩余壽命預(yù)測技術(shù)、基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測技術(shù)、統(tǒng)計數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測技術(shù)以及機(jī)器學(xué)習(xí)和統(tǒng)計數(shù)據(jù)驅(qū)動相結(jié)合的剩余壽命預(yù)測技術(shù)的基本研究思想和發(fā)展動態(tài), 剖析了當(dāng)前研究存在的局限性和共性難題. 針對存在的局限性和共性難題, 以多源傳感監(jiān)測大數(shù)據(jù)下剩余壽命預(yù)測問題為例, 提出了一種數(shù)模聯(lián)動的大數(shù)據(jù)下隨機(jī)退化設(shè)備剩余壽命預(yù)測解決思路, 并通過航空發(fā)動機(jī)多源監(jiān)測數(shù)據(jù)初步驗(yàn)證了該思路的可行性和有效性. 最后, 借鑒數(shù)模聯(lián)動思路, 綜合考慮機(jī)器學(xué)習(xí)方法和統(tǒng)計數(shù)據(jù)驅(qū)動方法的優(yōu)勢, 緊緊扭住大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命預(yù)測不確定性量化問題, 提出了大數(shù)據(jù)背景下深度學(xué)習(xí)與隨機(jī)退化建模交互聯(lián)動、監(jiān)測大數(shù)據(jù)與剩余壽命及其預(yù)測不確定性映射機(jī)制、非理想大數(shù)據(jù)下的剩余壽命預(yù)測等亟待解決的關(guān)鍵科學(xué)問題.
關(guān)鍵詞
大數(shù)據(jù)/ 剩余壽命預(yù)測/ 數(shù)模聯(lián)動/ 深度學(xué)習(xí)/ 隨機(jī)退化建模
高速列車、航空航天裝備、導(dǎo)彈武器、風(fēng)電裝備、工業(yè)機(jī)器人、石化裝備等現(xiàn)代裝備在功能不斷提升的同時, 正逐漸趨于大型化、多元化和集成化, 這類裝備多是由機(jī)械傳動系統(tǒng)、電磁驅(qū)動系統(tǒng)、運(yùn)動控制系統(tǒng)、信息傳感系統(tǒng)等耦合組成的復(fù)雜系統(tǒng), 其服役過程受變環(huán)境、變載荷、變工況、大擾動和強(qiáng)沖擊等因素影響, 整體及關(guān)鍵部件性能將發(fā)生不可避免的退化, 一旦因設(shè)備性能退化造成最終失效, 將會造成巨大的人員傷亡和財產(chǎn)損失. 例如, 2014年8月2日發(fā)生在我國江蘇省昆山市的重大鋁粉塵爆炸事故, 共造成97人死亡、163人受傷, 直接經(jīng)濟(jì)損失達(dá)到3.51億元, 事后調(diào)查表明: 除塵器維護(hù)不足而造成集塵桶銹蝕退化破損是主要技術(shù)原因. 2017年7月發(fā)生在美國密西西比州的美國海軍陸戰(zhàn)隊(duì)KC-130運(yùn)輸機(jī)墜毀事件, 造成機(jī)上16名軍人全部遇難, 該事故的調(diào)查結(jié)果表明發(fā)動機(jī)螺旋槳性能退化是造成飛機(jī)墜毀的主要原因. 因此, 若能在設(shè)備性能退化初期, 尤其在尚未造成重大危害時, 根據(jù)狀態(tài)監(jiān)測信息, 及時發(fā)現(xiàn)異常或定量評價設(shè)備健康狀態(tài)并預(yù)測其剩余壽命(Remaining useful life, RUL), 據(jù)此對設(shè)備實(shí)施健康管理, 對于切實(shí)保障復(fù)雜設(shè)備的運(yùn)行安全性、可靠性與經(jīng)濟(jì)性具有重要意義. 其中, 剩余壽命預(yù)測是連接系統(tǒng)運(yùn)行狀態(tài)信息感知與基于運(yùn)行狀態(tài)實(shí)現(xiàn)個性化精準(zhǔn)健康管理的紐帶和關(guān)鍵, 在過去十余年得到了長足的發(fā)展, 主要技術(shù)方法包括失效機(jī)理分析方法、數(shù)據(jù)驅(qū)動的方法、機(jī)理模型和數(shù)據(jù)混合驅(qū)動方法, 如圖1所示. 基于失效機(jī)理分析的方法主要通過構(gòu)建描述設(shè)備失效機(jī)理的數(shù)學(xué)模型, 結(jié)合特定設(shè)備的經(jīng)驗(yàn)知識和缺陷增長方程實(shí)現(xiàn)設(shè)備的剩余壽命預(yù)測. 由于實(shí)際工程設(shè)備本身的復(fù)雜性、任務(wù)與運(yùn)行環(huán)境的多樣性,其健康狀態(tài)演化規(guī)律通常難以物理機(jī)理建模或者獲得失效機(jī)理模型的代價過高, 導(dǎo)致失效機(jī)理方法及機(jī)理模型和數(shù)據(jù)混合驅(qū)動方法存在推廣應(yīng)用難的問題. 因此, 數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測技術(shù)已成為國際上可靠性工程和自動化技術(shù)領(lǐng)域的研究前沿, 過去十余年中得到了長足發(fā)展, 在航空航天、軍事、工業(yè)制造等領(lǐng)域具有極其重要的應(yīng)用.
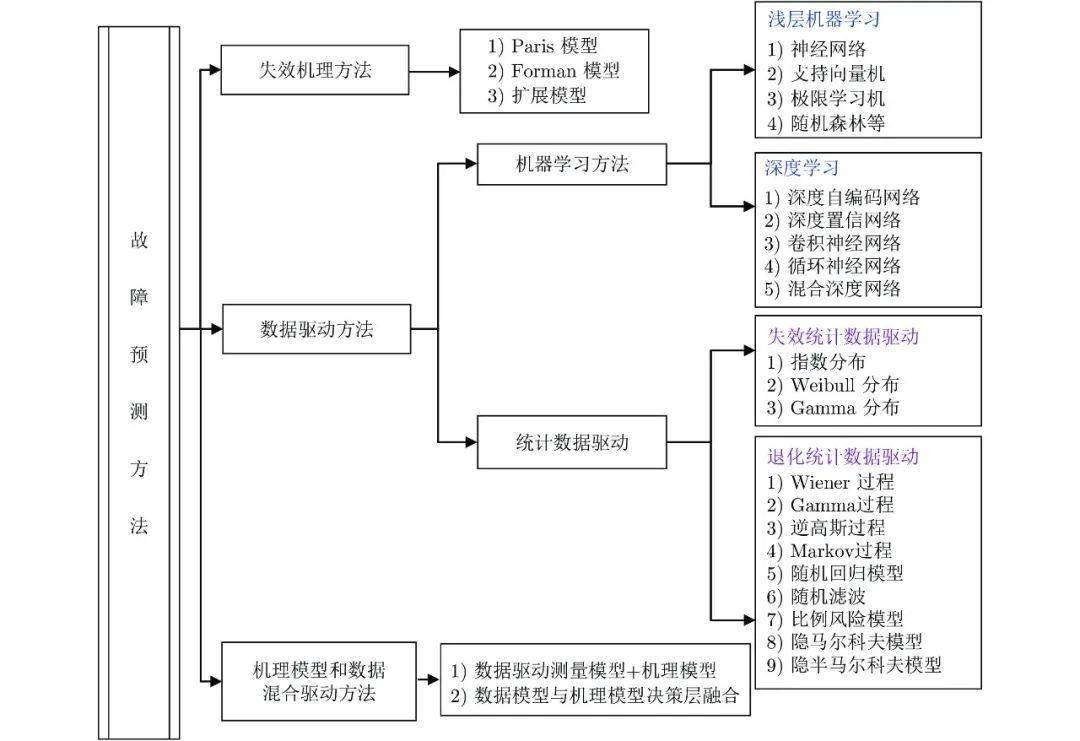
圖1剩余壽命預(yù)測方法體系
伴隨著先進(jìn)傳感技術(shù)的快速發(fā)展, 工程設(shè)備健康狀態(tài)感知手段日益豐富, 為設(shè)備運(yùn)行監(jiān)測大數(shù)據(jù)的獲取提供了更多的可能. 因此, 數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測技術(shù)發(fā)展迎來了新的契機(jī), 針對大數(shù)據(jù)處理的隨機(jī)退化設(shè)備剩余壽命預(yù)測問題得到了大量學(xué)者的關(guān)注, 相關(guān)技術(shù)蓬勃發(fā)展. 在此背景下, 本文的主要目的在于面向大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命預(yù)測的現(xiàn)實(shí)需求, 通過分析當(dāng)前剩余壽命預(yù)測技術(shù)的發(fā)展動態(tài), 旨在探究該領(lǐng)域亟待解決的關(guān)鍵問題和新的發(fā)展方向. 為此, 第1節(jié)首先結(jié)合數(shù)據(jù)特點(diǎn)對大數(shù)據(jù)下剩余壽命預(yù)測的研究背景、主要方法及思路、核心問題等進(jìn)行了概述. 第2 ~ 5節(jié)分別分析了機(jī)理模型與數(shù)據(jù)混合驅(qū)動的剩余壽命預(yù)測技術(shù)、基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測技術(shù)、統(tǒng)計數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測技術(shù)以及機(jī)器學(xué)習(xí)和統(tǒng)計數(shù)據(jù)驅(qū)動相結(jié)合的剩余壽命預(yù)測技術(shù)的基本研究思想和發(fā)展動態(tài), 同時結(jié)合隨機(jī)退化設(shè)備監(jiān)測大數(shù)據(jù)特點(diǎn)以及剩余壽命預(yù)測不確定性量化這一核心問題, 深入剖析了當(dāng)前研究存在的局限性和共性難題. 第6節(jié)針對當(dāng)前研究存在的局限性, 提出了一種多源傳感監(jiān)測大數(shù)據(jù)下數(shù)模聯(lián)動的隨機(jī)退化設(shè)備剩余壽命預(yù)測問題解決思路(簡稱為數(shù)模聯(lián)動, 這里需要說明的是, “數(shù)”是指數(shù)據(jù)退化特征提取, “模”是指所提取退化特征時變演化過程隨機(jī)建模), 通過構(gòu)建優(yōu)化目標(biāo)函數(shù)實(shí)現(xiàn)數(shù)據(jù)特征提取與所提取特征時變演化過程隨機(jī)建模的“聯(lián)動”, 并通過航空發(fā)動機(jī)多源監(jiān)測數(shù)據(jù)初步驗(yàn)證了該思路的可行性和有效性. 第7節(jié)借鑒數(shù)模聯(lián)動思路, 圍繞大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命預(yù)測不確定性量化這一核心問題, 探討并提出了大數(shù)據(jù)背景下深度學(xué)習(xí)與隨機(jī)退化建模交互聯(lián)動、監(jiān)測大數(shù)據(jù)與剩余壽命及其預(yù)測不確定性映射機(jī)制、非理想大數(shù)據(jù)下的剩余壽命預(yù)測等亟待解決的關(guān)鍵科學(xué)問題. 第8節(jié)總結(jié)全文.
1.大數(shù)據(jù)下剩余壽命預(yù)測問題概述
近年來, 隨著無線傳感、物聯(lián)網(wǎng)等技術(shù)快速興起與普及, 各式傳感器猶如一張龐大的神經(jīng)網(wǎng)絡(luò)密布在裝備內(nèi)部, 實(shí)時感知裝備的一舉一動, 推動剩余壽命預(yù)測進(jìn)入“大數(shù)據(jù)” 時代. 例如, 軍事裝備在國家戰(zhàn)略安全中具有不可替代的特殊地位, 其各子系統(tǒng)的安全可靠運(yùn)行舉足輕重, 必須依靠狀態(tài)監(jiān)測、剩余壽命預(yù)測以及預(yù)測維護(hù)等理論與方法保駕護(hù)航. 由于需要監(jiān)測的軍事裝備群規(guī)模大、每個裝備需監(jiān)測參量多、數(shù)據(jù)采樣頻率高、服役時間長, 所以獲取了海量監(jiān)測數(shù)據(jù): 一個現(xiàn)代航空發(fā)動機(jī), 每10毫秒就能生成幾百個傳感器信息, 每次飛行能產(chǎn)生TB級的運(yùn)行監(jiān)測數(shù)據(jù); 現(xiàn)代化工業(yè)制造生產(chǎn)線安裝有數(shù)以萬計的各型傳感器來監(jiān)測工業(yè)裝備的運(yùn)行過程信息及產(chǎn)品質(zhì)量信息, 比如大型工業(yè)機(jī)器人制造商利用云平臺監(jiān)控著百萬臺工業(yè)機(jī)器人, 實(shí)時獲取機(jī)器人每個運(yùn)動關(guān)節(jié)的轉(zhuǎn)速、角度、位置、溫度、振動等信號, 每天需要對TB級以上的數(shù)據(jù)進(jìn)行處理. 然而, 這些監(jiān)測大數(shù)據(jù)在為設(shè)備健康狀態(tài)感知及剩余壽命預(yù)測提供豐富信息的同時, 由于設(shè)備工況多變、多源信號差異大、采樣策略形式多、信息之間相互耦合、數(shù)據(jù)價值密度低, 導(dǎo)致數(shù)據(jù)質(zhì)量參差不齊, 狀態(tài)監(jiān)測大數(shù)據(jù)呈現(xiàn)不同的統(tǒng)計特性. 根據(jù)監(jiān)測數(shù)據(jù)呈現(xiàn)的特點(diǎn),圖2給出了完整監(jiān)測大數(shù)據(jù)和非完整監(jiān)測大數(shù)據(jù)(具有碎片化、分段的、稀疏性等特征)的示例.
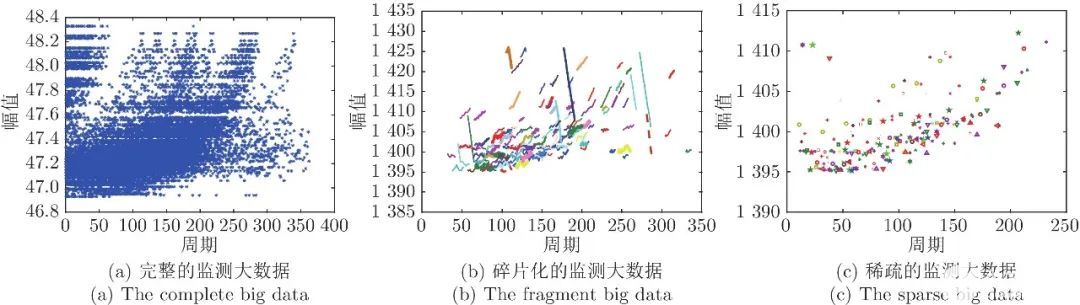
圖2完整的、碎片化的、稀疏的監(jiān)測大數(shù)據(jù)示例
這里完整監(jiān)測大數(shù)據(jù)主要針對運(yùn)行模式比較固定的隨機(jī)退化設(shè)備(如軸承、齒輪等), 能夠?qū)崿F(xiàn)不間斷連續(xù)監(jiān)測, 監(jiān)測大數(shù)據(jù)涵蓋了設(shè)備從開始運(yùn)行到失效比較完整的狀態(tài)數(shù)據(jù), 而非完整監(jiān)測大數(shù)據(jù)主要針對受經(jīng)濟(jì)條件及現(xiàn)實(shí)監(jiān)測條件限制的隨機(jī)退化設(shè)備(如航空發(fā)動機(jī)、渦輪泵、配電電池等), 對這類設(shè)備進(jìn)行連續(xù)監(jiān)測采樣是不現(xiàn)實(shí)的, 只能間歇性地對其監(jiān)測, 得到的狀態(tài)監(jiān)測大數(shù)據(jù)表現(xiàn)出一定的“碎片化、分段、稀疏”等特點(diǎn). 因此, 當(dāng)剩余壽命預(yù)測進(jìn)入大數(shù)據(jù)時代, 如何根據(jù)監(jiān)測大數(shù)據(jù)呈現(xiàn)出的不同特點(diǎn), 充分分析利用豐富的監(jiān)測大數(shù)據(jù)資源, 從浩如煙海的數(shù)據(jù)中進(jìn)行“沙里淘金”, 深度挖掘出反映設(shè)備健康狀態(tài)的信息并據(jù)此進(jìn)行剩余壽命預(yù)測, 是隨機(jī)退化設(shè)備剩余壽命預(yù)測領(lǐng)域亟需解決的關(guān)鍵問題.
數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測方法基于設(shè)備運(yùn)行監(jiān)測數(shù)據(jù), 通過擬合設(shè)備性能變量演化規(guī)律并外推到失效閾值, 或建立監(jiān)測數(shù)據(jù)與失效時間的映射關(guān)系, 以實(shí)現(xiàn)剩余壽命預(yù)測, 為大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命預(yù)測提供了可行的技術(shù)思路. 然而, 剩余壽命指當(dāng)前時刻到系統(tǒng)失效時刻的有效時間間隔, 因此剩余壽命預(yù)測實(shí)際上是根據(jù)當(dāng)前得到的監(jiān)測信息, 對系統(tǒng)將來失效事件的預(yù)測, 其預(yù)測結(jié)果不可避免的具有不確定性. van Asselt等從哲學(xué)和認(rèn)識論的角度討論了預(yù)測的不確定性處理問題, 指出預(yù)測結(jié)果具有不確定性是學(xué)術(shù)界的共識, 也是當(dāng)今時代的特征. 聯(lián)合攻擊機(jī)F-35項(xiàng)目組研究人員Hess等和Smith等、壽命預(yù)測領(lǐng)域代表性學(xué)者馬里蘭大學(xué)先進(jìn)生命周期工程中心Pecht教授等、可靠性領(lǐng)域知名期刊Quality and Reliability Engineering International主編Brombacher教授通過各種事例強(qiáng)調(diào)了預(yù)測不確定性的量化是剩余壽命預(yù)測從理論到應(yīng)用轉(zhuǎn)化的核心. 美國國家航空航天局(National Aeronautics and Space Administration, NASA)預(yù)測與健康管理中心研究規(guī)劃中也將剩余壽命預(yù)測不確定性的管理列為了中心發(fā)展路線圖的重要研究內(nèi)容. 由此可見, 預(yù)測不確定性的量化是數(shù)據(jù)驅(qū)動隨機(jī)退化設(shè)備剩余壽命預(yù)測領(lǐng)域的一個核心問題, 也是解決“敢用、能用” 剩余壽命預(yù)測理論技術(shù)實(shí)現(xiàn)實(shí)際工程設(shè)備個性化精準(zhǔn)健康管理、保障設(shè)備長周期安全可靠運(yùn)行的關(guān)鍵所在.
隨著信息技術(shù)和傳感器技術(shù)的迅猛發(fā)展, 數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測技術(shù)由于適用范圍廣、容易實(shí)現(xiàn)、無需深入專業(yè)機(jī)理知識等優(yōu)點(diǎn), 作為其中典型代表的機(jī)器學(xué)習(xí)方法和統(tǒng)計數(shù)據(jù)驅(qū)動方法已獲得了大量研究和蓬勃發(fā)展, 得到了學(xué)術(shù)界和工業(yè)界的廣泛關(guān)注, 相關(guān)技術(shù)已經(jīng)在導(dǎo)彈武器、航空航天、風(fēng)力發(fā)電、工業(yè)制造等領(lǐng)域產(chǎn)生了重要應(yīng)用[14-16]. 盡管以機(jī)器學(xué)習(xí)方法和統(tǒng)計數(shù)據(jù)驅(qū)動方法為典型代表的數(shù)據(jù)驅(qū)動隨機(jī)退化設(shè)備剩余壽命預(yù)測已獲得了大量研究和蓬勃發(fā)展, 但已有理論與方法在大數(shù)據(jù)背景下隨機(jī)退化設(shè)備剩余壽命預(yù)測及其預(yù)測不確定性量化這一核心問題上, 仍然沒有系統(tǒng)有效的解決方法, 主要體現(xiàn)在統(tǒng)計數(shù)據(jù)驅(qū)動方法處理大數(shù)據(jù)能力不足, 而機(jī)器學(xué)習(xí)方法量化預(yù)測不確定性能力不足. 因此, 通過對大數(shù)據(jù)背景下剩余壽命預(yù)測研究發(fā)展脈絡(luò)的探究, 深入剖析當(dāng)前研究存在的瓶頸問題, 對于促進(jìn)隨機(jī)退化設(shè)備剩余壽命預(yù)測技術(shù)的發(fā)展具有重要意義. 在第2 ~ 5節(jié), 將針對當(dāng)前大數(shù)據(jù)背景下剩余壽命預(yù)測典型解決思路的研究動態(tài)和存在的問題進(jìn)行具體的分析.
2.機(jī)理模型與數(shù)據(jù)混合驅(qū)動的剩余壽命預(yù)測
基于機(jī)理模型的方法主要是依據(jù)失效機(jī)理構(gòu)建描述設(shè)備退化過程的參數(shù)化數(shù)學(xué)模型, 結(jié)合設(shè)備的設(shè)計試驗(yàn)數(shù)據(jù)或經(jīng)驗(yàn)知識辨識數(shù)學(xué)模型參數(shù), 進(jìn)而基于狀態(tài)監(jiān)測數(shù)據(jù)更新機(jī)理模型參數(shù)實(shí)現(xiàn)設(shè)備的剩余壽命預(yù)測. 典型的參數(shù)識別與更新方法包括: 卡爾曼濾波[17-19]、粒子濾波[20-21]和貝葉斯方法[22-23]等. 常見的用于剩余壽命預(yù)測的機(jī)理模型包括: Paris模型、Forman模型以及在其基礎(chǔ)上的各種改進(jìn)和擴(kuò)展模型, 主要用以描述裂紋擴(kuò)展和層裂增長[24-25]. 例如, Li等[26-27]基于Paris模型, 建立了缺陷增長率與缺陷面積及材料常數(shù)的映射關(guān)系, 以預(yù)測滾動軸承的剩余壽命; Li等[28]提出了Paris裂紋擴(kuò)展模型, 根據(jù)裂紋尺寸和動態(tài)載荷預(yù)測齒輪的剩余使用壽命; Liang等[29]研究了基于Paris模型的滾珠軸承剩余使用壽命自適應(yīng)預(yù)測方法, 即使在缺乏先驗(yàn)信息且缺陷增長為時變的情況下, 也能獲得可靠的預(yù)測結(jié)果. Oppenheimer等[30]利用線彈性斷裂力學(xué), 對轉(zhuǎn)軸建立了基于Forman裂紋擴(kuò)展的壽命模型; 針對層裂增長故障, Marble等[31]開發(fā)了一種渦輪發(fā)動機(jī)軸承的層裂增長預(yù)測模型, 能夠根據(jù)工況估計層裂增長軌跡和故障時間, 并利用診斷反饋進(jìn)行自調(diào)整, 降低了預(yù)測不確定性; Choi等[32]考慮了由于裂紋形成和磨粒磨損引起的層裂增長現(xiàn)象, 提出了滾動接觸的層裂增長壽命模型. 在充分理解失效機(jī)理并得到準(zhǔn)確的模型估計參數(shù)后, 基于機(jī)理模型的方法能夠?qū)崿F(xiàn)對剩余使用壽命的精確預(yù)測. 然而, 以上現(xiàn)有基于機(jī)理模型的剩余壽命預(yù)測方法未能結(jié)合實(shí)際運(yùn)行設(shè)備的實(shí)時監(jiān)測數(shù)據(jù), 難以準(zhǔn)確反映設(shè)備當(dāng)前運(yùn)行的實(shí)際狀態(tài), 特別是在設(shè)備運(yùn)行環(huán)境、運(yùn)行工況發(fā)生變化時, 若不能利用實(shí)時監(jiān)測數(shù)據(jù)對模型進(jìn)行更新, 將產(chǎn)生較大的預(yù)測偏差.
為了使得機(jī)理模型能夠更好地建模實(shí)際服役個體設(shè)備的性能演變過程, 將設(shè)備實(shí)時運(yùn)行監(jiān)測數(shù)據(jù)與機(jī)理模型進(jìn)行混合, 將有助于實(shí)現(xiàn)剩余壽命預(yù)測準(zhǔn)確性的提升. 因此, 機(jī)理模型與數(shù)據(jù)混合驅(qū)動的剩余壽命預(yù)測方法也得到了較多的關(guān)注和發(fā)展[4]. 最近該方面的研究包括Liao等[33]、Wang等[34]的論文, 這些研究分別針對鋰電池系統(tǒng)和旋轉(zhuǎn)機(jī)械設(shè)備, 提出了機(jī)理模型與數(shù)據(jù)混合驅(qū)動的剩余壽命預(yù)測方法. 根據(jù)機(jī)理模型與數(shù)據(jù)混合驅(qū)動實(shí)現(xiàn)方式不同, 可將這類混合驅(qū)動的剩余壽命預(yù)測方法分為兩大類: 1)基于監(jiān)測數(shù)據(jù)構(gòu)建機(jī)理模型所刻畫退化狀態(tài)的測量模型, 運(yùn)用卡爾曼濾波、粒子濾波等方法估計退化狀態(tài)和機(jī)理模型參數(shù), 然后通過機(jī)理模型預(yù)測設(shè)備的剩余壽命[12,35]; 2)首先分別基于數(shù)據(jù)和機(jī)理模型進(jìn)行設(shè)備的剩余壽命預(yù)測, 然后利用決策層融合方法實(shí)現(xiàn)集成基于數(shù)據(jù)和基于機(jī)理模型的剩余壽命預(yù)測[36-37]. 以上兩類機(jī)理模型與數(shù)據(jù)混合驅(qū)動實(shí)現(xiàn)剩余壽命預(yù)測的方式各具優(yōu)勢: 第1種方式能夠充分考慮退化狀態(tài)難以直接測量的實(shí)際, 在考慮監(jiān)測數(shù)據(jù)中測量噪聲的情況下, 可實(shí)現(xiàn)隱含退化狀態(tài)的估計和機(jī)理模型參數(shù)的更新, 使得最終的預(yù)測結(jié)果能夠更準(zhǔn)確地反映設(shè)備當(dāng)前的實(shí)際狀態(tài); 第2種方式實(shí)現(xiàn)過程相對簡單獨(dú)立, 決策層融合的形式較為多樣, 如平均法、權(quán)重平均、核回歸、證據(jù)組合等, 能夠集成多種方法的優(yōu)勢, 有助于提升預(yù)測結(jié)果的魯棒性.
雖然基于機(jī)理模型的方法和機(jī)理模型與數(shù)據(jù)混合驅(qū)動方法得到了一定的發(fā)展, 但其成功應(yīng)用的基礎(chǔ)是可獲取精確可靠的機(jī)理模型. 隨著當(dāng)代設(shè)備逐步呈現(xiàn)復(fù)雜化、非線性化以及高維化等特征, 其健康狀態(tài)演化規(guī)律通常難以精確機(jī)理建模或者獲得失效機(jī)理模型的成本過高. 現(xiàn)有研究中通過物理機(jī)理分析、理化分析、實(shí)驗(yàn)分析等手段獲取的機(jī)理模型主要針對特定材料或?qū)ο? 這一點(diǎn)也可以通過當(dāng)前機(jī)理模型的種類相當(dāng)匱乏反映出, 由此在一定程度上限制了這類方法的廣泛應(yīng)用. 因此, 在大數(shù)據(jù)背景下, 通過挖掘數(shù)據(jù)中隱含的設(shè)備健康狀態(tài)信息, 發(fā)展數(shù)據(jù)驅(qū)動的剩余壽命預(yù)測方法成為當(dāng)前的主流和研究的焦點(diǎn).
3.基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測
基于機(jī)器學(xué)習(xí)的設(shè)備剩余壽命預(yù)測主要思路是通過機(jī)器學(xué)習(xí)擬合性能變量演化規(guī)律并通過滾動外推到失效閾值以預(yù)測失效時間, 或直接建立監(jiān)測數(shù)據(jù)與失效時間的映射關(guān)系實(shí)現(xiàn)端到端的預(yù)測, 基于此通過預(yù)測的失效時間減去當(dāng)前運(yùn)行時間得到剩余壽命的預(yù)測值. 裴洪等[38]和Khan等[39]分別綜述了機(jī)器學(xué)習(xí)方法和深度學(xué)習(xí)方法在剩余壽命預(yù)測與健康管理領(lǐng)域的研究應(yīng)用現(xiàn)狀. 為區(qū)別于以上綜述中介紹的工作, 本文重點(diǎn)結(jié)合最新的研究進(jìn)展和大數(shù)據(jù)下剩余壽命預(yù)測的現(xiàn)實(shí)需求, 對基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測技術(shù)發(fā)展動態(tài)和存在的問題進(jìn)行分析. 根據(jù)機(jī)器學(xué)習(xí)網(wǎng)絡(luò)模型結(jié)構(gòu)特點(diǎn), 這類方法主要分為基于淺層機(jī)器學(xué)習(xí)的方法和基于深度學(xué)習(xí)的方法.
3.1
基于淺層機(jī)器學(xué)習(xí)的剩余壽命預(yù)測
基于淺層機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法中的典型代表為神經(jīng)網(wǎng)絡(luò)、支持向量機(jī)等, 具體發(fā)展動態(tài)分述如下.
1) 神經(jīng)網(wǎng)絡(luò)
神經(jīng)網(wǎng)絡(luò)是一種模擬人類中樞神經(jīng)系統(tǒng)組織結(jié)構(gòu)與信息處理機(jī)制的學(xué)習(xí)網(wǎng)絡(luò), 主要由輸入層、隱層和輸出層組成[40]. 神經(jīng)網(wǎng)絡(luò)具有自學(xué)習(xí)、自組織、自適應(yīng)以及強(qiáng)非線性映射擬合能力等優(yōu)點(diǎn)[41-42], 因而在設(shè)備剩余壽命預(yù)測領(lǐng)域受到了學(xué)者們的廣泛關(guān)注[43-45]. 早在2004年, Gebraeel等[46]就將單隱層前饋神經(jīng)網(wǎng)絡(luò)用于機(jī)械設(shè)備振動信號建模, 通過外推至失效閾值實(shí)現(xiàn)剩余壽命預(yù)測. Mahamad等[47]通過改進(jìn)前饋神經(jīng)網(wǎng)絡(luò)訓(xùn)練算法, 將改進(jìn)后的網(wǎng)絡(luò)用于旋轉(zhuǎn)機(jī)械的壽命預(yù)測. Lim等[48]采用特征時序直方圖法從多源監(jiān)測數(shù)據(jù)中提取了具有局部趨勢性的退化指標(biāo), 然后將這些退化指標(biāo)輸入到多層感知機(jī)中去預(yù)測航空發(fā)動機(jī)的剩余壽命. Drouillet等[49]將單隱層前饋神經(jīng)網(wǎng)絡(luò)用于高速銑刀剩余壽命預(yù)測. Ahmadzadeh[50]等使用多層感知機(jī)去預(yù)測研磨機(jī)剩余壽命. Zhang等[51]基于小波包分解、快速傅里葉變換和反向傳播神經(jīng)網(wǎng)絡(luò)構(gòu)建了鼓風(fēng)機(jī)剩余壽命預(yù)測模型. 徐東輝[52]提出了多類神經(jīng)網(wǎng)絡(luò)組合預(yù)測的方法, 利用改進(jìn)的Elman神經(jīng)網(wǎng)絡(luò)和非線性自回歸神經(jīng)網(wǎng)絡(luò)兩個單項(xiàng)預(yù)測模型進(jìn)行預(yù)測, 并且借助于徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對兩個單項(xiàng)模型的預(yù)測值進(jìn)行非線性組合, 實(shí)現(xiàn)了剩余壽命預(yù)測. 楊洋[53]研究了一種基于自回歸移動平均和后向傳播神經(jīng)網(wǎng)絡(luò)組合模型的鋰電池壽命預(yù)測方法, 有效結(jié)合了兩者在短期預(yù)測方面與非線性擬合方面的優(yōu)勢. 在最新的研究中, Bektas等[54]通過引入傳感器選擇、數(shù)據(jù)歸一化、特征提取等數(shù)據(jù)預(yù)處理技術(shù), 將預(yù)處理后的數(shù)據(jù)用于訓(xùn)練神經(jīng)網(wǎng)絡(luò), 提出了一種基于神經(jīng)網(wǎng)絡(luò)和相似性的剩余壽命預(yù)測方法. Li等[55]利用監(jiān)測數(shù)據(jù)訓(xùn)練了多個神經(jīng)網(wǎng)絡(luò), 基于加權(quán)平均思想提出了一種基于集成網(wǎng)絡(luò)的剩余壽命預(yù)測方法.
2)支持向量機(jī)
支持向量機(jī)是由Cortes[56]和Vapnik[57]于1995年首次提出的, 在小樣本和高維數(shù)據(jù)機(jī)器學(xué)習(xí)領(lǐng)域受到廣泛關(guān)注, 主要原理是首先通過非線性變換將多維輸入向量映射到高維特征空間, 然后在高維特征空間中構(gòu)造最優(yōu)超平面來實(shí)現(xiàn)樣本分類或回歸. 由于支持向量機(jī)能夠有效避免“維數(shù)災(zāi)難”問題, 且具有較好的泛化能力, 因而廣泛應(yīng)用于設(shè)備的剩余壽命預(yù)測中[58-61]. 例如, Soualhi等[62]利用Hilbert-Huang變換構(gòu)建了滾動軸承的敏感退化指標(biāo), 然后將這些退化指標(biāo)輸入到支持向量機(jī)中實(shí)現(xiàn)了旋轉(zhuǎn)軸承的剩余壽命預(yù)測; Sun等[63]構(gòu)建了貝葉斯最小二乘法支持向量機(jī)預(yù)測模型, 并將其用于微波器件的剩余壽命預(yù)測; Nieto等[64]將支持向量機(jī)應(yīng)用到了航空發(fā)動機(jī)的剩余壽命預(yù)測中; Khelif等[65]研究提出了一種不需要建立健康指標(biāo)、故障狀態(tài)等直接基于支持向量回歸模型建立監(jiān)測數(shù)據(jù)與設(shè)備壽命的擬合關(guān)系, 進(jìn)而實(shí)現(xiàn)了剩余壽命預(yù)測. Huang等[66]對基于支持向量機(jī)的剩余壽命預(yù)測方法研究現(xiàn)狀、應(yīng)用領(lǐng)域及發(fā)展趨勢進(jìn)行了系統(tǒng)地梳理和分析.
3)其他淺層模型
除了以上幾種常用的淺層模型外, 一些其他機(jī)器學(xué)習(xí)模型也被應(yīng)用到裝備的剩余壽命預(yù)測中, 如極限學(xué)習(xí)機(jī)[67]、貝葉斯網(wǎng)絡(luò)[68]、隨機(jī)森林[69]、梯度提升決策樹[70]、基于案例的學(xué)習(xí)方法[71]、基于案例的推理方法[72]等. 文獻(xiàn)[38]對基于淺層機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法進(jìn)行了詳細(xì)綜述, 本文不再贅述.
通過文獻(xiàn)總結(jié)分析可以發(fā)現(xiàn), 雖然淺層神經(jīng)網(wǎng)絡(luò)訓(xùn)練相對比較容易, 基于淺層機(jī)器學(xué)習(xí)方法實(shí)現(xiàn)設(shè)備剩余壽命預(yù)測的研究具有較長的歷史, 但這類方法中采用的網(wǎng)絡(luò)結(jié)構(gòu)簡單、預(yù)測性能較多地依賴于專家先驗(yàn)知識與信號處理技術(shù), 且難于量化剩余壽命預(yù)測結(jié)果的不確定性. 此外, 這類研究中較多的方法需借助人工經(jīng)驗(yàn)與知識預(yù)先提取監(jiān)測數(shù)據(jù)中的關(guān)鍵信息并構(gòu)建退化指標(biāo), 因此退化指標(biāo)的好壞將很大程度上決定淺層神經(jīng)網(wǎng)絡(luò)的預(yù)測性能. 在大數(shù)據(jù)時代, 設(shè)備退化特征愈發(fā)表現(xiàn)出耦合性、不確定性、非完整性等特點(diǎn), 淺層機(jī)器學(xué)習(xí)算法自學(xué)習(xí)能力較弱, 難以自動處理和分析海量監(jiān)測數(shù)據(jù). 因此, 大數(shù)據(jù)下剩余壽命預(yù)測的智能學(xué)習(xí)模型由“淺”入“深”、勢在必行.
3.2
基于深度學(xué)習(xí)的剩余壽命預(yù)測
深度學(xué)習(xí)作為一種大數(shù)據(jù)處理工具, 旨在模擬大腦學(xué)習(xí)過程, 構(gòu)建深度模型, 通過海量數(shù)據(jù)學(xué)習(xí)特征, 刻畫數(shù)據(jù)豐富的內(nèi)在信息, 最終提升建模精度. 深度學(xué)習(xí)自從2006年在Science上首次提出便掀起了學(xué)術(shù)界和工業(yè)界的研究浪潮, 如雨后春筍, 以其強(qiáng)大的海量數(shù)據(jù)處理能力在諸多領(lǐng)域的大數(shù)據(jù)分析中方興未艾. 經(jīng)過了十余年的探索, 深度學(xué)習(xí)當(dāng)前已成功應(yīng)用于許多工程領(lǐng)域, 如圖像識別[73]、自然語言處理[74]、語音識別[75]、故障診斷[76]等, 同時在剩余壽命預(yù)測領(lǐng)域也嶄露頭角. 如圖1所示, 根據(jù)網(wǎng)絡(luò)結(jié)構(gòu)的不同, 這類方法主要包括: 基于深度自編碼器的方法、基于深度置信網(wǎng)絡(luò)的方法、基于卷積神經(jīng)網(wǎng)絡(luò)的方法、基于循環(huán)神經(jīng)網(wǎng)絡(luò)的方法以及多種網(wǎng)絡(luò)組合而成的混合網(wǎng)絡(luò)方法. 無論基于哪種深度網(wǎng)絡(luò)結(jié)構(gòu)形式, 其基本思想都是采用現(xiàn)有深度學(xué)習(xí)模型建立性能測試數(shù)據(jù)與剩余壽命標(biāo)簽或退化標(biāo)簽之間的潛在關(guān)系. 下面針對幾種典型的深度學(xué)習(xí)網(wǎng)絡(luò), 介紹其應(yīng)用于剩余壽命預(yù)測時的研究動態(tài)并分析當(dāng)前研究存在的問題.
1)深度自編碼網(wǎng)絡(luò)
深度自編碼網(wǎng)絡(luò)是由多個自編碼器或降噪自編碼器堆疊組成的深度神經(jīng)網(wǎng)絡(luò). 基于深度自編碼網(wǎng)絡(luò)的剩余壽命預(yù)測通過提取出原始數(shù)據(jù)的深層次特征, 然后通過邏輯回歸層或全連接層實(shí)現(xiàn)機(jī)械裝備的剩余壽命預(yù)測[77-80]. 由于自編碼器是以重構(gòu)原始輸入為學(xué)習(xí)目標(biāo), 因而其學(xué)習(xí)到的特征對數(shù)據(jù)有更本質(zhì)的刻畫, 有利于提高預(yù)測精度, 且深度自編碼網(wǎng)絡(luò)能夠以無監(jiān)督學(xué)習(xí)方式逐層對網(wǎng)絡(luò)參數(shù)進(jìn)行預(yù)訓(xùn)練, 將訓(xùn)練結(jié)果作為反向微調(diào)的初始值, 確保了網(wǎng)絡(luò)參數(shù)的在線更新, 在剩余壽命預(yù)測領(lǐng)域得到了廣泛的應(yīng)用[81-85]. 例如, Xia等[79]提出了一種基于深度自編碼網(wǎng)絡(luò)的兩階段剩余壽命預(yù)測方法, 首先運(yùn)用深度降噪自編碼器網(wǎng)絡(luò)對監(jiān)測大數(shù)據(jù)進(jìn)行階段劃分, 然后訓(xùn)練深度自編碼網(wǎng)絡(luò)得到每個階段的退化特征, 最后通過回歸方法分析各階段特征實(shí)現(xiàn)剩余壽命預(yù)測. 然而, 深度自編碼網(wǎng)絡(luò)在處理力信號、振動信號、聲發(fā)射信號、光信號等高維原始監(jiān)測數(shù)據(jù)時, 其仍需要借助各類信號處理技術(shù)來提取設(shè)備的退化指標(biāo).
2)深度置信網(wǎng)絡(luò)
深度置信網(wǎng)絡(luò)主要是由多個受限波爾茲曼機(jī)堆疊與一個分類層或回歸層組合形成的深度網(wǎng)絡(luò), 通過逐層預(yù)訓(xùn)練和反向精調(diào)策略解決深度模型普遍存在的訓(xùn)練困難問題, 不僅能實(shí)現(xiàn)數(shù)據(jù)從淺層到深層的特征表示與提取, 而且能發(fā)現(xiàn)輸入數(shù)據(jù)的分布式特征, 在深層特征提取方面獲得了廣泛的應(yīng)用. 例如, Jiao等[86]提出了一種基于深度置信網(wǎng)絡(luò)的健康指標(biāo)構(gòu)建方法用于裝備的剩余壽命預(yù)測, 該方法采用無監(jiān)督學(xué)習(xí)的策略融合多個傳感器監(jiān)測數(shù)據(jù)對裝備健康狀態(tài)進(jìn)行評估, 得到描述其退化程度的健康指標(biāo)用于剩余壽命預(yù)測. 需要注意的是, 深度置信網(wǎng)絡(luò)在實(shí)際中的應(yīng)用主要集中在深層次特征提取方面, 單純利用深度置信網(wǎng)絡(luò)實(shí)現(xiàn)剩余壽命預(yù)測的研究還相當(dāng)有限, 需要與其他網(wǎng)絡(luò)混合進(jìn)行才能進(jìn)行剩余壽命預(yù)測.
3)卷積神經(jīng)網(wǎng)絡(luò)
卷積神經(jīng)網(wǎng)絡(luò)作為一類經(jīng)典的前饋神經(jīng)網(wǎng)絡(luò), 是由LeCun等[87]首次提出并用于解決圖像處理問題的, 主要由若干卷積層和池化層組成, 既能輸入序列數(shù)據(jù), 也能處理網(wǎng)格化數(shù)據(jù), 在計算機(jī)視覺、語音識別等領(lǐng)域應(yīng)用十分廣泛. 針對設(shè)備性能監(jiān)測大數(shù)據(jù)的特點(diǎn), 先后發(fā)展出了多種用于剩余壽命預(yù)測的卷積神經(jīng)網(wǎng)絡(luò), 主要包括深度卷積神經(jīng)網(wǎng)絡(luò)[88]、多層可分離卷積神經(jīng)網(wǎng)絡(luò)[89]、多尺度卷積神經(jīng)網(wǎng)絡(luò)[90]、聯(lián)合損失卷積神經(jīng)網(wǎng)絡(luò)[91]等. Babu等[92]首次將深度卷積神經(jīng)網(wǎng)絡(luò)應(yīng)用于剩余壽命預(yù)測領(lǐng)域, 采用兩個卷積層和兩個池化層提取原始信號特征, 同時結(jié)合多層感知器實(shí)現(xiàn)剩余壽命的預(yù)測. 最近, Yang等[93]提出了一種基于兩個卷積神經(jīng)網(wǎng)絡(luò)的剩余壽命預(yù)測方法, 其中一個是分類網(wǎng)絡(luò)用于監(jiān)測性能退化的初始時刻, 另一個是回歸網(wǎng)絡(luò)用于預(yù)測剩余壽命. 相比于其他深度學(xué)習(xí)網(wǎng)絡(luò), 卷積神經(jīng)網(wǎng)絡(luò)能夠更有效地處理力信號、振動信號、聲發(fā)射信號、光信號等高維原始數(shù)據(jù), 可實(shí)現(xiàn)從監(jiān)測數(shù)據(jù)中自動提取退化特征信息, 適合處理監(jiān)測大數(shù)據(jù)且具有降噪的功能, 同時其網(wǎng)絡(luò)參數(shù)量相對較少, 訓(xùn)練更加方便高效, 因此易于構(gòu)建更深的網(wǎng)絡(luò)結(jié)構(gòu). 然而, 隨機(jī)退化設(shè)備的監(jiān)測數(shù)據(jù)蘊(yùn)含的健康特征往往是時序相關(guān)的, 而卷積神經(jīng)網(wǎng)絡(luò)在應(yīng)對大數(shù)據(jù)下時序特征提取能力不足, 容易造成重要時序特征的丟失, 這對于剩余壽命預(yù)測是不利的, 因此卷積神經(jīng)網(wǎng)絡(luò)在應(yīng)用于剩余壽命預(yù)測時經(jīng)常與其他深度網(wǎng)絡(luò)組合使用.
4)循環(huán)神經(jīng)網(wǎng)絡(luò)
循環(huán)神經(jīng)網(wǎng)絡(luò)作為一類包含前饋連接與內(nèi)部反饋連接的前饋神經(jīng)網(wǎng)絡(luò), 主要用于處理具有相互依賴特性的監(jiān)測向量序列, 由于其特殊的網(wǎng)絡(luò)結(jié)構(gòu), 能夠保留隱含層上一時刻的狀態(tài)信息, 目前已經(jīng)在剩余壽命預(yù)測領(lǐng)域得到廣泛的關(guān)注, 被應(yīng)用于鋰電池系統(tǒng)[94]、風(fēng)力發(fā)電設(shè)備[95]、航空發(fā)動機(jī)[96]等. 為解決循環(huán)神經(jīng)網(wǎng)絡(luò)通常存在“記憶衰退”進(jìn)而導(dǎo)致預(yù)測偏差較大這一問題, 學(xué)者們對循環(huán)神經(jīng)網(wǎng)絡(luò)模型進(jìn)行了改進(jìn), 提出了一種長短期記憶(Long short term memory, LSTM)模型, 門結(jié)構(gòu)作為LSTM的獨(dú)特結(jié)構(gòu), 能夠在最優(yōu)條件下確定出所通過信息特征, 在剩余壽命預(yù)測領(lǐng)域獲得了廣泛的應(yīng)用[97-98]. 例如: 為解決運(yùn)行和環(huán)境擾動引起的不確定性問題, Elsheikh等[99]對LSTM的結(jié)構(gòu)分別進(jìn)行了改進(jìn), 提出了基于雙向LSTM的剩余壽命預(yù)測方法. 雖然循環(huán)神經(jīng)網(wǎng)絡(luò)在隨機(jī)退化設(shè)備退化過程建模方面具有先天優(yōu)勢, 但當(dāng)處理長期依賴型退化數(shù)據(jù)時, 循環(huán)神經(jīng)網(wǎng)絡(luò)在訓(xùn)練過程中也經(jīng)常面臨梯度消失或爆炸問題. 同時, 以上基于循環(huán)神經(jīng)網(wǎng)絡(luò)的剩余壽命預(yù)測研究中都未考慮預(yù)測結(jié)果不確定性的量化問題, 只能輸出一個剩余壽命的點(diǎn)估計, 難以評估預(yù)測結(jié)果的置信度.
最近, 針對剩余壽命預(yù)測不確定性量化問題, Zhang等[100]在假定退化數(shù)據(jù)服從正態(tài)分布的前提下利用Monte Carlo方法從退化數(shù)據(jù)中隨機(jī)采樣, 通過改變LSTM網(wǎng)絡(luò)輸入, 在不同網(wǎng)絡(luò)輸入下得到不同的剩余壽命預(yù)測值, 由此構(gòu)造剩余壽命的數(shù)值分布, 試圖量化預(yù)測不確定性. Huang等[101]利用雙向LSTM網(wǎng)絡(luò)預(yù)測剩余壽命輸出的均方根誤差構(gòu)建剩余壽命預(yù)測的誤差帶, 以區(qū)間的形式表示預(yù)測不確定性. Yu等[102]對退化監(jiān)測數(shù)據(jù)進(jìn)行劃分、以退化量為標(biāo)簽, 建立了多個基于LSTM網(wǎng)絡(luò)的退化量預(yù)測模型, 然后通過滾動預(yù)測的思想將預(yù)測值作為模型輸入迭代預(yù)測至退化量超過失效預(yù)測的時刻, 由此確定設(shè)備的剩余壽命預(yù)測值. 進(jìn)一步, 為綜合多個LSTM網(wǎng)絡(luò)預(yù)測值, 引入Bayesian模型平均方法, 估計各個模型的后驗(yàn)概率, 由此可以確定最終的剩余壽命預(yù)測值和預(yù)測置信區(qū)間, 有效提高了剩余壽命預(yù)測精度的同時以置信區(qū)間的形式表示了預(yù)測不確定性. 以上思路在基于機(jī)器學(xué)習(xí)方法的剩余壽命預(yù)測不確定性量化方面做出了有益的嘗試, 然而無論是改變輸入條件構(gòu)建數(shù)值分布、基于均方根誤差構(gòu)建誤差帶, 還是構(gòu)建多個預(yù)測模型通過Bayesian模型平均構(gòu)建置信區(qū)間, 都更多地反映了網(wǎng)絡(luò)訓(xùn)練的效果而不能全面反映設(shè)備性能退化固有的時變隨機(jī)性和動態(tài)特性.
5)混合深度網(wǎng)絡(luò)
基于混合深度網(wǎng)絡(luò)的方法可看作多個深度學(xué)習(xí)網(wǎng)絡(luò)以一定方式組合連接(如串聯(lián)、并聯(lián)等)用于彌補(bǔ)現(xiàn)有單一深度學(xué)習(xí)網(wǎng)絡(luò)的不足, 目前主要的混合形式包括深度置信網(wǎng)絡(luò) + 前饋神經(jīng)網(wǎng)絡(luò)[103]、受限玻爾茲曼機(jī) + LSTM網(wǎng)絡(luò)[104]、LSTM網(wǎng)絡(luò) + 卷積神經(jīng)網(wǎng)絡(luò)[105]、LSTM網(wǎng)絡(luò) + 編碼?解碼模型[106]、循環(huán)神經(jīng)網(wǎng)絡(luò) + 自編碼器[107]、多損失編碼器 + 兩階段卷積神經(jīng)網(wǎng)絡(luò)[108]等. 這類方法主要通過繼承不同深度學(xué)習(xí)模型的優(yōu)勢, 進(jìn)而期望實(shí)現(xiàn)取長補(bǔ)短、改善剩余壽命預(yù)測的效果. 例如: Ren等[109]提出了一種堆棧自編碼器與前饋神經(jīng)網(wǎng)絡(luò)組合的軸承剩壽命預(yù)測方法, 該方法能夠有效利用堆棧自編碼器在特征表示方面的優(yōu)勢, 同時將其引入至前饋神經(jīng)網(wǎng)絡(luò)可有效避免訓(xùn)練過程中的局部最優(yōu)問題; Deutsch等[104]提出了一種融合深度置信網(wǎng)絡(luò)與前饋神經(jīng)網(wǎng)絡(luò)的旋轉(zhuǎn)設(shè)備剩余壽命預(yù)測方法, 這是基于深度置信網(wǎng)絡(luò)方法的改進(jìn)和拓展, 能夠有效結(jié)合深度置信網(wǎng)絡(luò)特征提取能力與前饋神經(jīng)網(wǎng)絡(luò)的預(yù)測性能. 雖然通過混合深度網(wǎng)絡(luò)進(jìn)行剩余壽命預(yù)測有助于產(chǎn)生互補(bǔ)效應(yīng), 但混合多種深度網(wǎng)絡(luò)將不可避免地導(dǎo)致剩余壽命預(yù)測模型的訓(xùn)練復(fù)雜化, 而且混合方式的選擇基本上是啟發(fā)式的, 缺乏公認(rèn)統(tǒng)一的形式. 因此, 發(fā)展剩余壽命預(yù)測相關(guān)性能要求牽引下的混合深度網(wǎng)絡(luò)構(gòu)建方式以提高混合方式的可解釋性仍有待深入研究.
需要說明的是, 基于深度學(xué)習(xí)的剩余壽命預(yù)測研究正在蓬勃發(fā)展, 以上介紹到的文獻(xiàn)僅是冰山一角. 通過對當(dāng)前相關(guān)研究發(fā)展動態(tài)的分析不難發(fā)現(xiàn), 無論是傳統(tǒng)的基于淺層機(jī)器學(xué)習(xí)還是正在蓬勃發(fā)展的基于深度學(xué)習(xí)的剩余壽命預(yù)測研究, 基本上都可以歸結(jié)到兩種思路, 即基于退化量滾動預(yù)測和基于學(xué)習(xí)網(wǎng)絡(luò)建立監(jiān)測數(shù)據(jù)與失效時間端到端的映射. 雖然在以上兩種思路下的剩余壽命預(yù)測方法研究快速發(fā)展, 且都屬于數(shù)據(jù)驅(qū)動的方法, 但當(dāng)前研究面對剩余壽命預(yù)測現(xiàn)實(shí)需求時主要存在以下有待解決的問題:
1)目前這些基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測研究, 基本上都是將其他領(lǐng)域應(yīng)用需求驅(qū)動下提出并發(fā)展起來的各種深度網(wǎng)絡(luò)直接應(yīng)用, 其網(wǎng)絡(luò)結(jié)構(gòu)和參數(shù)均是確定性的, 一般只能得到確定性的剩余壽命預(yù)測值, 很難得到能夠量化剩余壽命預(yù)測不確定性的概率分布. 正如第1節(jié)所討論的, 剩余壽命預(yù)測針對的是設(shè)備將來的失效事件, 而設(shè)備性能退化在預(yù)測區(qū)間內(nèi)受到環(huán)境、負(fù)載等多重隨機(jī)因素影響, 導(dǎo)致剩余壽命預(yù)測結(jié)果不可避免地具有不確定性, 因此剩余壽命預(yù)測不確定性的量化表征是該領(lǐng)域的一個核心問題. 然而, 目前基于機(jī)器學(xué)習(xí)的方法對這方面重視不夠, 在預(yù)測不確定性量化能力上存在不足. 無法量化預(yù)測不確定性也意味著無法量化預(yù)測結(jié)果帶來的風(fēng)險, 由此導(dǎo)致難以滿足以最小化運(yùn)行風(fēng)險或最小化費(fèi)用為目標(biāo)的健康管理相關(guān)決策(如維護(hù)決策、備件訂購等)對運(yùn)行風(fēng)險定量評估的應(yīng)用需求[39]. 造成以上問題的根本原因在于所采用的學(xué)習(xí)網(wǎng)絡(luò)并不是針對剩余壽命預(yù)測的核心需求設(shè)計的, 更多的是直接采用或借鑒其他任務(wù)需求下發(fā)展起來的學(xué)習(xí)網(wǎng)絡(luò). 因此, 如何設(shè)計并發(fā)展面向剩余壽命預(yù)測及其不確定性量化需求的專用學(xué)習(xí)網(wǎng)絡(luò), 使得其能夠從監(jiān)測數(shù)據(jù)中學(xué)習(xí)到反映預(yù)測不確定性的剩余壽命概率分布相關(guān)的信息, 是克服現(xiàn)有研究發(fā)展瓶頸的根本途徑和有重要價值的研究方向.
2)現(xiàn)有研究中通過學(xué)習(xí)網(wǎng)絡(luò)建立監(jiān)測數(shù)據(jù)與失效時間端到端映射以預(yù)測剩余壽命的思路, 其成功實(shí)現(xiàn)的前提是能夠獲取充分的同類設(shè)備失效時間數(shù)據(jù)以制作訓(xùn)練標(biāo)簽. 然而, 在工程實(shí)際中, 由于受到安全性與經(jīng)濟(jì)性等因素的限制, 設(shè)備運(yùn)行至失效狀態(tài)是極其危險的, 一般在失效前對設(shè)備進(jìn)行替換. 在該情況下, 所能獲取的更多的是設(shè)備在服役過程中積累的大量狀態(tài)監(jiān)測數(shù)據(jù), 關(guān)于設(shè)備失效時間的數(shù)據(jù)幾乎沒有, 因而這類狀態(tài)監(jiān)測大數(shù)據(jù)大多屬于非全壽命周期類型. 盡管大數(shù)據(jù)背景下非全壽命周期數(shù)據(jù)包含了豐富的設(shè)備退化機(jī)制與壽命信息, 但由于失效數(shù)據(jù)匱乏將導(dǎo)致現(xiàn)有基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法中所需的壽命標(biāo)簽難以制作(即零壽命標(biāo)簽問題), 由此為構(gòu)建監(jiān)測數(shù)據(jù)與剩余壽命之間端到端的映射關(guān)系帶來了極大的挑戰(zhàn). 與此同時, 基于退化量滾動預(yù)測的思路以退化量為標(biāo)簽構(gòu)建預(yù)測模型, 能夠減少對壽命標(biāo)簽數(shù)據(jù)的依賴, 但在實(shí)現(xiàn)過程中將本身存在誤差的退化量預(yù)測值作為預(yù)測模型輸入進(jìn)行滾動預(yù)測, 容易造成預(yù)測誤差的累積, 進(jìn)而影響剩余壽命預(yù)測的準(zhǔn)確性. 此外, 目前基于以上思路的剩余壽命預(yù)測研究主要針對完整監(jiān)測數(shù)據(jù), 而對于圖2所示的“碎片化、分段的、稀疏的”非完整監(jiān)測大數(shù)據(jù)與剩余壽命之間的映射關(guān)系鮮有研究. 因此, 零壽命標(biāo)簽情形下如何通過非完整監(jiān)測大數(shù)據(jù)構(gòu)建隨機(jī)退化設(shè)備剩余壽命預(yù)測模型, 發(fā)展剩余壽命預(yù)測研究的新范式仍有待解決.
3)如前所述, 剩余壽命預(yù)測是銜接設(shè)備健康狀態(tài)感知與基于狀態(tài)感知信息實(shí)現(xiàn)設(shè)備的個性化精準(zhǔn)健康管理的橋梁, 因此剩余壽命預(yù)測方法的可解釋性對于將預(yù)測結(jié)果用于設(shè)備的健康管理(如預(yù)測維護(hù)、備件訂購等)至關(guān)重要. 然而, 現(xiàn)有基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法通過學(xué)習(xí)網(wǎng)絡(luò)建立監(jiān)測數(shù)據(jù)與剩余壽命之間的映射關(guān)系, 監(jiān)測數(shù)據(jù)與剩余壽命之間的關(guān)系難以顯式表示, 呈現(xiàn)“黑箱” 特點(diǎn), 難以解釋設(shè)備退化失效機(jī)理. 此外, 當(dāng)前的研究較多地關(guān)注了剩余壽命預(yù)測的準(zhǔn)確性, 但機(jī)器學(xué)習(xí)模型中超參數(shù)的選擇對預(yù)測結(jié)果的準(zhǔn)確性和魯棒性具有重要影響, 預(yù)測的效果對調(diào)參技巧和經(jīng)驗(yàn)有較大的依賴, 而如何合理有效地選擇機(jī)器學(xué)習(xí)模型的超參數(shù)在機(jī)器學(xué)習(xí)領(lǐng)域本身就是一個極具挑戰(zhàn)性的問題. 綜合以上兩個方面可見, 發(fā)展具有可解釋性的基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法, 將有助于打通當(dāng)前這類方法從理論研究到推廣應(yīng)用于設(shè)備健康管理的最后一公里. 提高基于機(jī)器學(xué)習(xí)的剩余壽命預(yù)測方法的可解釋性的研究方向包括在學(xué)習(xí)網(wǎng)絡(luò)設(shè)計中考慮設(shè)備退化失效的機(jī)理知識、基于學(xué)習(xí)網(wǎng)絡(luò)從監(jiān)測數(shù)據(jù)中提取退化特征時將特征的趨勢性或單調(diào)性作為約束條件考慮、將超參數(shù)的選擇問題轉(zhuǎn)化為提升預(yù)測效果的優(yōu)化問題納入模型訓(xùn)練過程等.
審核編輯 黃昊宇
-
數(shù)模
+關(guān)注
關(guān)注
0文章
40瀏覽量
15117 -
大數(shù)據(jù)
+關(guān)注
關(guān)注
64文章
8908瀏覽量
137799 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5516瀏覽量
121553
發(fā)布評論請先 登錄
相關(guān)推薦
基于梯度下降算法的三元鋰電池循環(huán)壽命預(yù)測

PECVD沉積SiNx:H薄膜HID氫誘導(dǎo)退化的研究

智慧城市與大數(shù)據(jù)的關(guān)系
什么是開關(guān)柜壽命診斷?如何實(shí)現(xiàn)開關(guān)柜壽命診斷?

開關(guān)柜如何實(shí)現(xiàn)壽命診斷分析

SRCMH070IB+ 對生產(chǎn)設(shè)備進(jìn)行剩余電流監(jiān)控
如何正確選擇剩余電流保護(hù)器
基于無人機(jī)高光譜謠感的蘊(yùn)地退化指示物種的識別
設(shè)備預(yù)測性維護(hù)策略與方案建設(shè)

大數(shù)據(jù)采集系統(tǒng)分為幾類
工業(yè)大數(shù)據(jù)云平臺在設(shè)備預(yù)測性維護(hù)中的作用
大數(shù)據(jù)在部隊(duì)管理中的運(yùn)用有哪些
車用鋰離子動力電池循環(huán)壽命衰減預(yù)測技術(shù)探析

基于設(shè)備監(jiān)控運(yùn)維管理平臺實(shí)現(xiàn)預(yù)測性維護(hù)
簡析大數(shù)據(jù)技術(shù)下智能充電樁在網(wǎng)絡(luò)系統(tǒng)中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論