 ORB-SLAM2的變量命名規則代碼運行流程簡析
ORB-SLAM2的變量命名規則代碼運行流程簡析
運行官方Demo
以TUM數據集為例,運行Demo的命令:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE
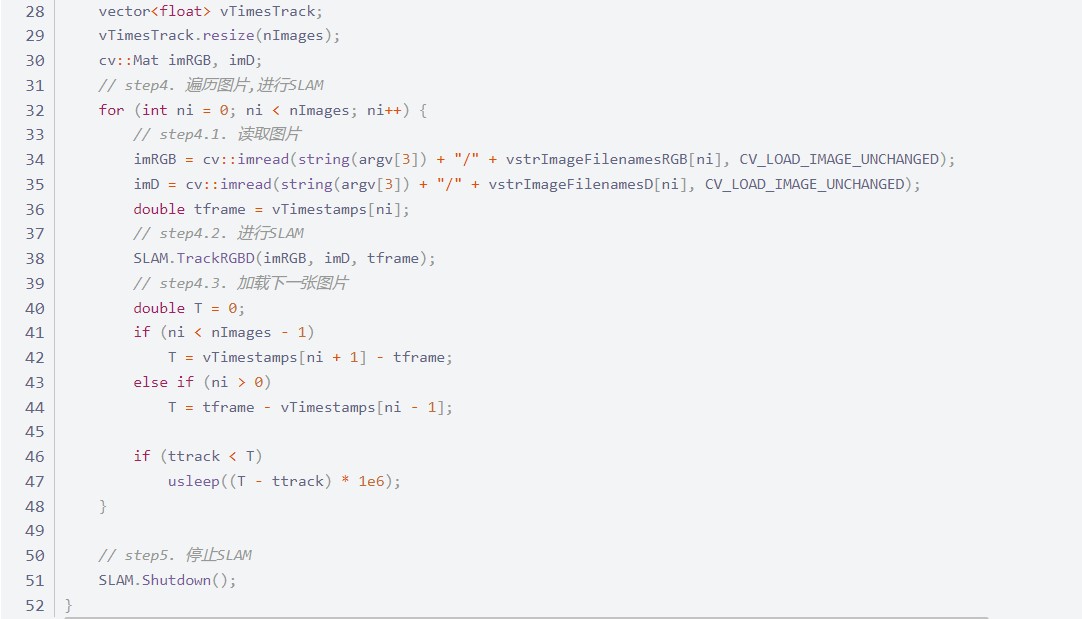
rgbd_tum.cc的源碼:
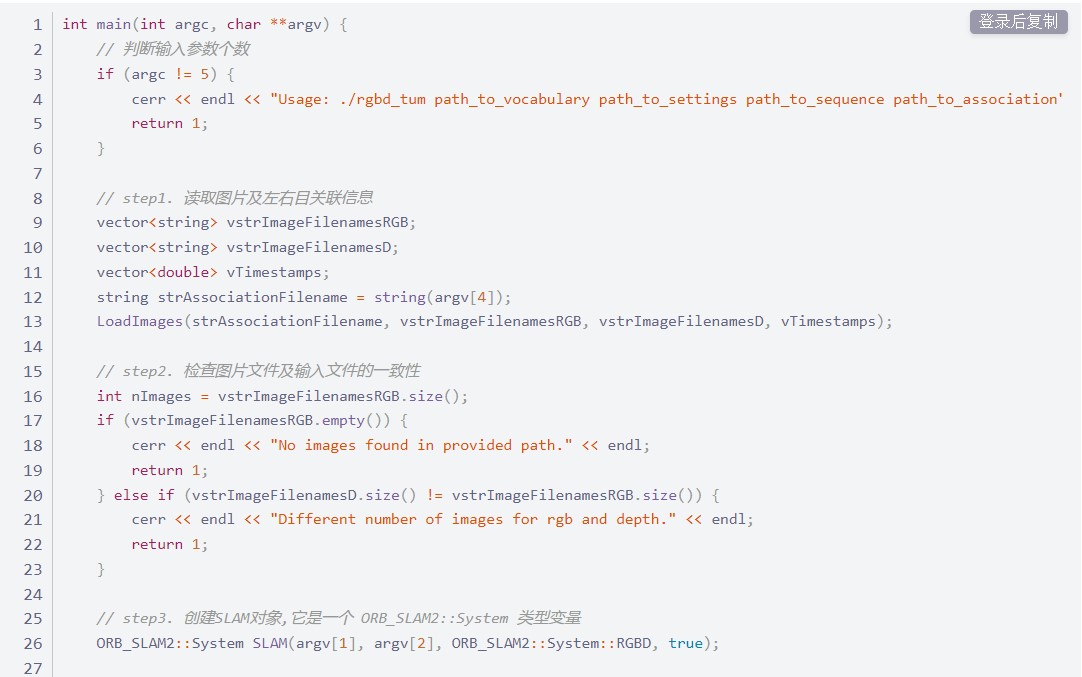
運行程序rgbd_tum時傳入了一個重要的配置文件TUM1.yaml,其中保存了相機參數和ORB特征提取參數:

 閱讀代碼之前你應該知道的事情 變量命名規則 ORB-SLAM2中的變量遵循一套命名規則: 1、變量名的第一個字母為m表示該變量為某類的成員變量. 2、變量名的第一、二個字母表示數據類型: ·p表示指針類型 ·n表示int類型 ·b表示bool類型 ·s表示std::set類型 ·v表示std::vector類型 ·l表示std::list類型 ·KF表示KeyFrame類型 這種將變量類型寫進變量名的命名方法叫做匈牙利命名法. 理解多線程 為什么要使用多線程? 1、加快運算速度:
閱讀代碼之前你應該知道的事情 變量命名規則 ORB-SLAM2中的變量遵循一套命名規則: 1、變量名的第一個字母為m表示該變量為某類的成員變量. 2、變量名的第一、二個字母表示數據類型: ·p表示指針類型 ·n表示int類型 ·b表示bool類型 ·s表示std::set類型 ·v表示std::vector類型 ·l表示std::list類型 ·KF表示KeyFrame類型 這種將變量類型寫進變量名的命名方法叫做匈牙利命名法. 理解多線程 為什么要使用多線程? 1、加快運算速度:

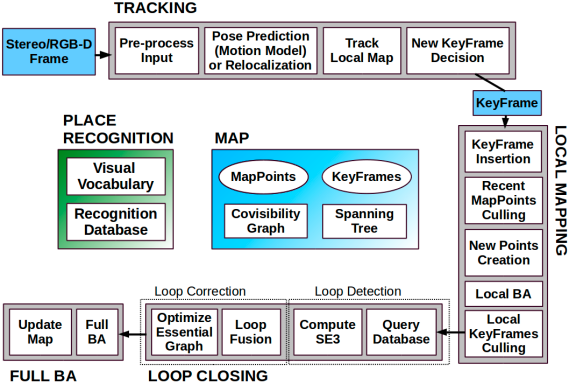
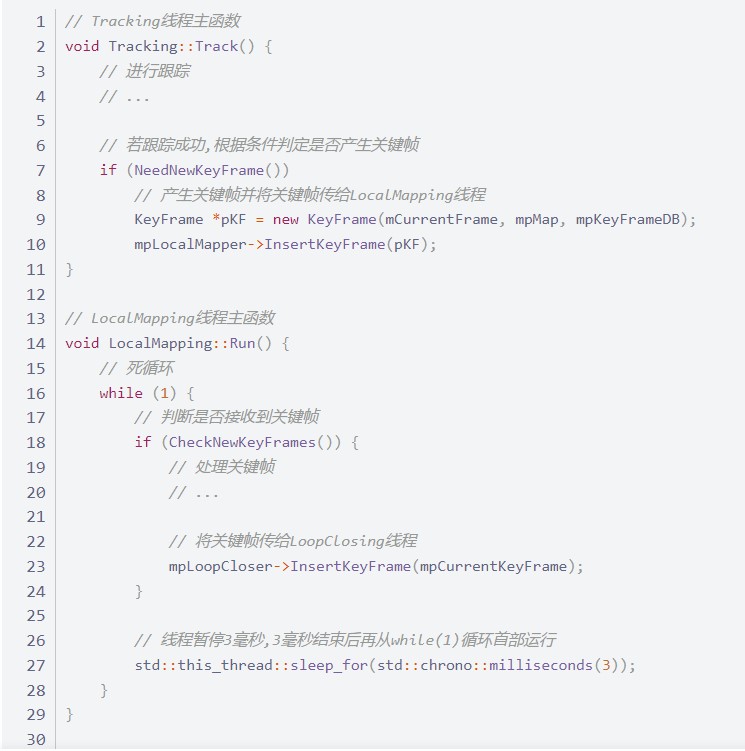
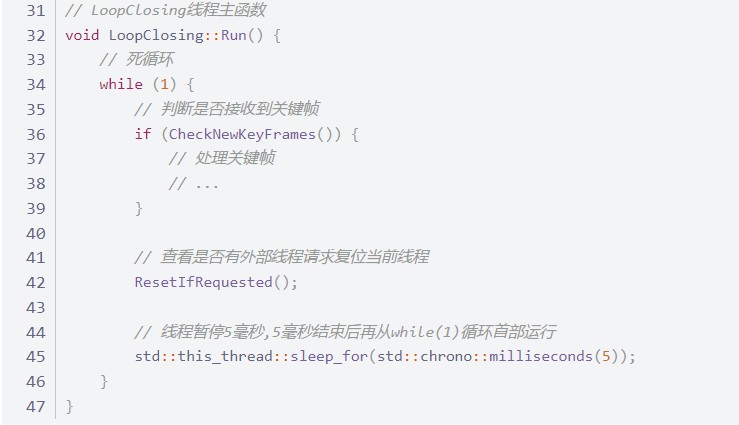
開兩個線程同時計算兩個矩陣,在多核處理器上會加快運算速度 2. 因為系統的隨機性,各步驟的運行順序是不確定的 . Tracking線程不產生關鍵幀時,LocalMapping和LoopClosing線程基本上處于空轉的狀態 . 而Tracking線程產生關鍵幀的頻率和時機不是固定的,因此需要3個線程同時運行,LocalMapping和LoopClosing線程不斷循環查詢Tracking線程是否產生關鍵幀,產生了的話就處理.
 多線程中的鎖 為防止多個線程同時操作同一變量造成混亂,引入鎖機制: 將成員函數本身設為私有變量(private或protected),并在操作它們的公有函數內加鎖.
多線程中的鎖 為防止多個線程同時操作同一變量造成混亂,引入鎖機制: 將成員函數本身設為私有變量(private或protected),并在操作它們的公有函數內加鎖.
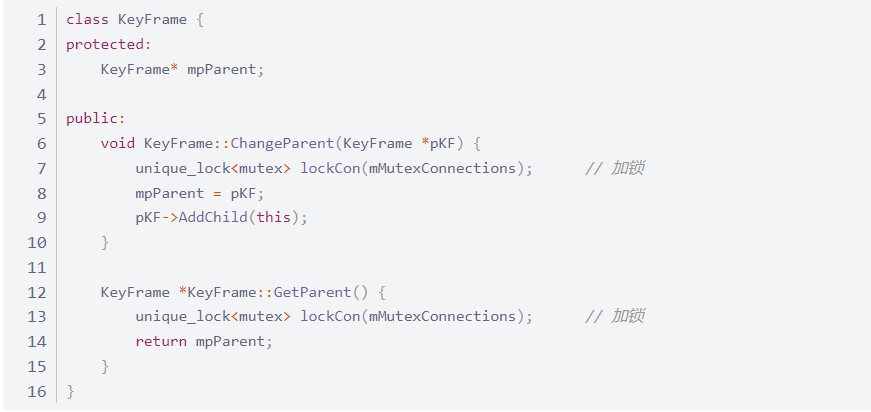
一把鎖在某個時刻只有一個線程能夠拿到,如果程序執行到某個需要鎖的位置,但是鎖被別的線程拿著不釋放的話,當前線程就會暫停下來;直到其它線程釋放了這個鎖,當前線程才能拿走鎖并繼續向下執行. 什么時候加鎖和釋放鎖? unique_lock

SLAM主類System System類是ORB-SLAM2系統的主類,先分析其主要的成員函數和成員變量:
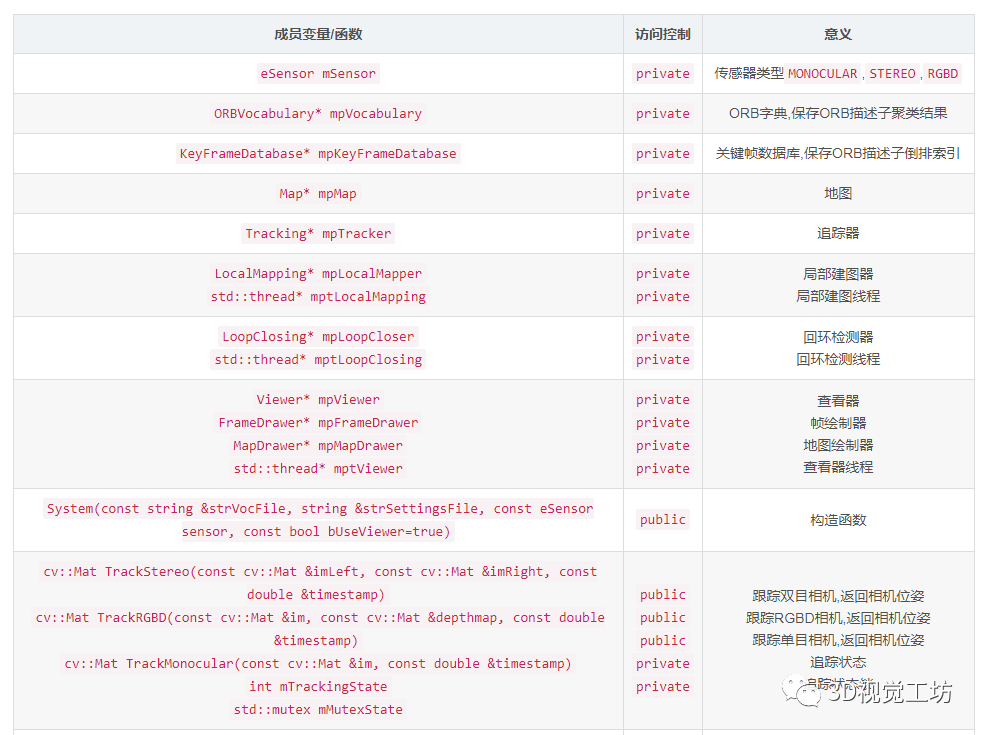
構造函數 System(const string &strVocFile, string &strSettingsFile, const eSensor sensor, const bool bUseViewer=true): 構造函數
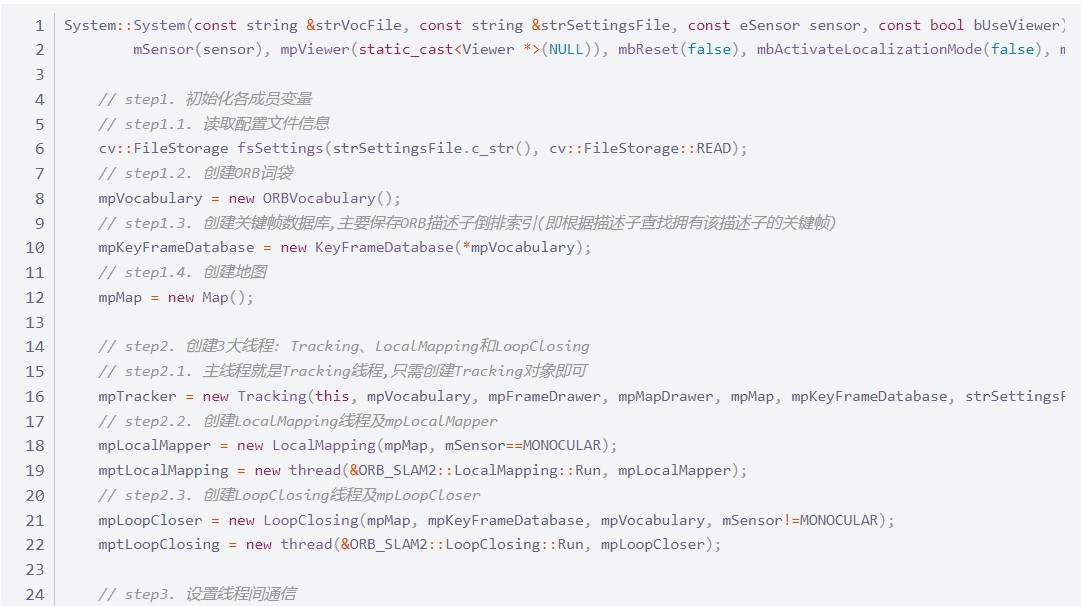

LocalMapping和LoopClosing線程在System類中有對應的std::thread線程成員變量,為什么Tracking線程沒有對應的std::thread成員變量? 因為Tracking線程就是主線程,而LocalMapping和LoopClosing線程是其子線程,主線程通過持有兩個子線程的指針(mptLocalMapping和mptLoopClosing)控制子線程. (ps: 雖然在編程實現上三大主要線程構成父子關系,但邏輯上我們認為這三者是并發的,不存在誰控制誰的問題).
跟蹤函數
System對象所在的主線程就是跟蹤線程,針對不同的傳感器類型有3個用于跟蹤的函數,其內部實現就是調用成員變量mpTracker的GrabImageMonocular(GrabImageStereo或GrabImageRGBD)方法.

傳感器類型用于跟蹤的成員函數 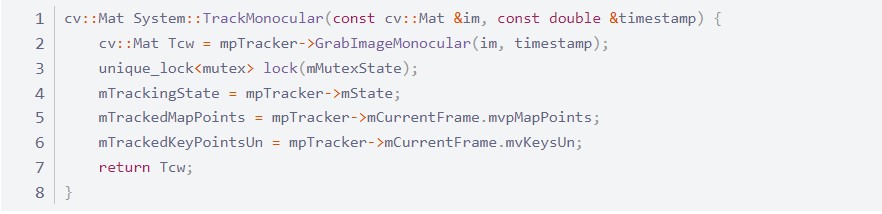
審核編輯:劉清
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756633 -
SLAM
+關注
關注
23文章
426瀏覽量
31931
原文標題:ORB-SLAM2代碼運行流程
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
代碼里的命名規則:錯誤的和正確的對比
請問用樹莓派運行ORB-SLAM2算法可行嗎?
javascript變量命名規則與規范

編程代碼的書寫規則
簡析獲取單片機代碼運行時間的方法資料下載

ORB SLAM中涉及的一些基礎概念
ORB-SLAM3與ORB-SLAM2相比有哪些優勢呢?
OV2SLAM(高速視覺slam)簡析
ORB-SLAM3整體流程詳解

工程實踐中VINS與ORB-SLAM的優劣分析

基于多攝像頭的高魯棒性視覺SLAM系統設計





 工商網監
工商網監
評論