 觸覺壓力傳感器壓力測量方式 兩個測量電氣的基本特性
觸覺壓力傳感器壓力測量方式 兩個測量電氣的基本特性
觸覺傳感涉及測量兩個表面之間直接物理接觸區域的力和壓力分布。然而,雖然可以使用常見的力和壓力測量方法,但所應用的機制通常要復雜得多。
壓力是一個標量值,定義為特定區域上的力。可以將力視為具有特定大小和方向的矢量。傳統的單軸力測量設備,例如稱重傳感器,可以結合精密彎曲以將接觸聚焦到單個、控制良好的點,在該點可以隔離和測量三個方向分量中的一個或多個。
然而,當考慮薄而靈活的觸覺壓力傳感器時,試圖捕捉的是兩個表面之間的相互作用,因此這些復雜的測量必須在表面相互作用邊界進行,同時盡量減少傳感器本身對傳感器的影響和侵入。塊。應用。這意味著準確設計、校準和驗證觸覺傳感器的性能是一項具有挑戰性的工作,需要仔細考慮。本文檔旨在作為指南,以更好地了解影響校準的參數以及過程和最終結果本身。
觸覺感應技術
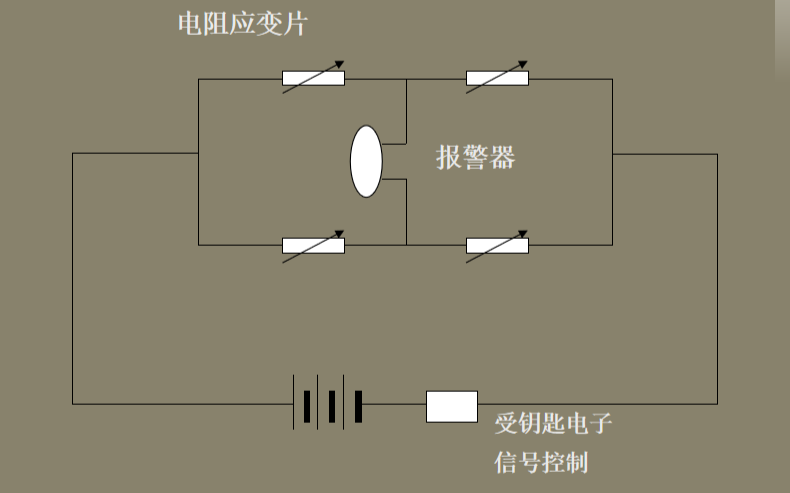
當前所有的商業觸覺傳感方式通常都基于測量兩個基本電氣特性之一:電阻或電容。
PPS傳感器技術的開發始于1990年代初的哈佛機器人實驗室,其目標是使機器人具有“觸覺”。該技術專注于基于電容的觸覺壓力測量,其中由絕緣電介質隔開的兩個不同的金屬導體形成一個電容器。
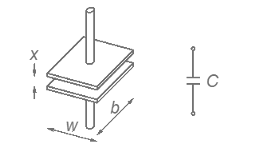
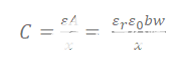
以法拉(F)為單位測量的簡單平面電容器的電容(C)由公式1給出:
·導體板寬度(w)(mm)
·導體板深度(b)(mm)
·板面積(A)(mm2)
·平行板間位移(x)(mm)
·介電常數(e)(F m–1)
·自由空間的介電常數(e0)(8.85′10–12 F m–1)
·相對介電常數(eR)(無量綱)
一個或兩個導體板上的力會導致平行板之間的位移(x)發生變化,從而導致電容發生變化,這可以通過電學測量和量化,從而允許從該值推斷輸入壓力。這些板的偏轉(通常為50毫米量級)導致非常高的靈敏度、可重復性和隨時間推移的穩定性。
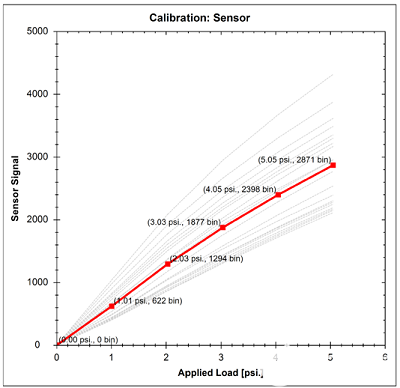
由于變化的傳感器參數實際上是板之間的位移(x),因此由于參數在公式1的分母中的位置,電容相對于該位移的變化是非線性的。
因此,典型的未校準PPS觸覺傳感器將具有固有非線性的響應曲線,在低壓下具有較高的靈敏度,而在較高壓力下具有較低的靈敏度。這種非線性特性具有雙重優勢,即在低壓下具有良好的靈敏度,同時允許更高的滿量程范圍。
由于測量電容比測量電阻變化更困難,電容傳感器歷來更加復雜和昂貴,同時還具有較低的掃描速率。
值得注意的是,PPS已經研究和開發了許多具有不同相對介電常數的專有介電間隔材料,以在低壓和高壓之間實現最佳靈敏度和機械壓力測量性能。
審核編輯:湯梓紅
-
壓力傳感器
+關注
關注
35文章
2243瀏覽量
163593 -
壓力測量
+關注
關注
0文章
20瀏覽量
10466 -
觸覺傳感器
+關注
關注
4文章
86瀏覽量
9397
發布評論請先 登錄
相關推薦
壓力傳感器應用實例詳解
常見壓力傳感器工業原理匯總
壓力傳感器的八種測量方法
壓力傳感器測試方法_壓力傳感器的測量原理_壓力傳感器種類
壓力傳感器原理_壓力傳感器OFweek Mall怎么用
壓力傳感器特性及其應用設計





 工商網監
工商網監
評論