") 超構(gòu)表面增強(qiáng)視場(chǎng)激光雷達(dá)概念設(shè)計(jì)
超構(gòu)表面增強(qiáng)視場(chǎng)激光雷達(dá)概念設(shè)計(jì)
自動(dòng)駕駛汽車(chē)和倉(cāng)儲(chǔ)機(jī)器人等自主運(yùn)行系統(tǒng)包含了多種傳感器,以獲取關(guān)于周?chē)h(huán)境的信息,用于實(shí)時(shí)確定其位置、速度和加速度。其中,測(cè)距傳感器,尤其是光學(xué)測(cè)距傳感器,為機(jī)器人系統(tǒng)提供了視覺(jué)能力,成為工業(yè)過(guò)程自動(dòng)化的核心,即所謂的“4.0工業(yè)”革命。目前,已有多種光學(xué)成像技術(shù)集成進(jìn)入工業(yè)機(jī)器人用于3D圖像信息采集,例如多目立體視覺(jué)相機(jī)、雷達(dá)、結(jié)構(gòu)光相機(jī)以及激光雷達(dá)(LiDAR)等。激光雷達(dá)這一技術(shù)概念起源于上個(gè)世紀(jì)60年代初,美國(guó)麻省理工學(xué)院(MIT)的科學(xué)家報(bào)道了向月球表面發(fā)送光輻射并檢測(cè)回波信號(hào)以進(jìn)行測(cè)距的方法。
基于麻省理工學(xué)院的開(kāi)創(chuàng)性工作,激光雷達(dá)的研究一直利用激光源照射目標(biāo)物體或場(chǎng)景,然后收集回波信號(hào),從而重建高分辨率三維(3D)圖像。傳統(tǒng)的激光雷達(dá)利用了飛行時(shí)間(ToF)測(cè)量原理,即向遠(yuǎn)處反射物體發(fā)射激光脈沖,然后測(cè)量從激光傳輸?shù)綊呙鑸?chǎng)景并返回到檢測(cè)模塊的往返時(shí)間。激光雷達(dá)所有組件必須同步工作,以標(biāo)記返回脈沖,用于測(cè)距成像重建。
要實(shí)現(xiàn)大范圍空間感知,激光雷達(dá)光源必須能夠?qū)Υ笠晥?chǎng)(FoV)進(jìn)行掃描。然后,通過(guò)測(cè)量每個(gè)方向的飛行時(shí)間,逐點(diǎn)檢測(cè)場(chǎng)景中的對(duì)象,以構(gòu)建光學(xué)回波圖。調(diào)幅連續(xù)波(AMCW)、調(diào)頻連續(xù)波(FMCW)或步進(jìn)頻率連續(xù)波(SFCW)等其他測(cè)量原理采用恒定或時(shí)間調(diào)制頻率的連續(xù)波來(lái)測(cè)量調(diào)制光信息的往返時(shí)間。
激光雷達(dá)系統(tǒng)能夠?qū)h(yuǎn)、中、近距離的物體或場(chǎng)景進(jìn)行實(shí)時(shí)3D測(cè)量,在機(jī)器人視覺(jué)以外還有很多應(yīng)用,例如地理測(cè)繪、大氣顆粒物探測(cè)、風(fēng)速測(cè)量、靜態(tài)和/或移動(dòng)物體跟蹤以及增強(qiáng)現(xiàn)實(shí)/虛擬現(xiàn)實(shí)(AR/VR)等。通常,根據(jù)光源是同時(shí)照射場(chǎng)景還是掃描場(chǎng)景,激光雷達(dá)可以分為非掃描式(例如Flash激光雷達(dá))或掃描式系統(tǒng)。
掃描式激光雷達(dá)系統(tǒng)通常包含三個(gè)關(guān)鍵組件:(i)光源,(ii)光束操縱掃描模塊,以及(iii)探測(cè)系統(tǒng),以高速重建從場(chǎng)景中接收到的光學(xué)信息。過(guò)去幾十年來(lái),基于納米光子學(xué)的激光雷達(dá)系統(tǒng)蓬勃發(fā)展,提出了更先進(jìn)的掃描和探測(cè)技術(shù)。預(yù)計(jì)激光雷達(dá)將在汽車(chē)行業(yè)大規(guī)模用于高級(jí)駕駛輔助系統(tǒng)(ADAS),以及全自動(dòng)駕駛,這為其光速操縱掃描系統(tǒng)提出了新挑戰(zhàn),包括低制造復(fù)雜性、規(guī)模制造、成本、重量、耐振動(dòng)等。
目前,工業(yè)應(yīng)用的激光雷達(dá)主要采用宏觀機(jī)械系統(tǒng)掃描整個(gè)360°視場(chǎng)。除了視場(chǎng)大以外,這類(lèi)體積龐大的系統(tǒng)成像速度有限,只有幾十赫茲。對(duì)于宏觀機(jī)械式光束掃描,MEMS光束操縱方案是有前景的發(fā)展方向,它可以將掃描頻率提升至kHz范圍。然而,MEMS光束操縱方案的一個(gè)主要缺點(diǎn)是視場(chǎng)小,通常水平掃描不超過(guò)25°,垂直掃描不超過(guò)15°。
而在研究層面,采用光學(xué)相控陣(OPA)方案的光束操縱可以提供卓越的掃描速度,以及60°左右的視場(chǎng)。不過(guò),由于其制造方面的挑戰(zhàn),OPA方案在不遠(yuǎn)的將來(lái)還不太可能在工業(yè)級(jí)系統(tǒng)中大規(guī)模部署。工業(yè)上成熟的液晶調(diào)制器也不足以作為激光雷達(dá)掃描儀,因?yàn)槠湟晥?chǎng)角較差,通常低于20°,具體取決于波長(zhǎng)及其調(diào)制頻率。此外,聲光偏轉(zhuǎn)器(AOD)能夠?qū)崿F(xiàn)超快掃描(MHz),但在激光雷達(dá)領(lǐng)域從未被考慮過(guò),因?yàn)槠湟晥?chǎng)角太窄,最大只有2°,必須要在高速成像和大視場(chǎng)之間權(quán)衡。
過(guò)去十年來(lái),超構(gòu)表面(Metasurface)憑借任意調(diào)控光特性(即振幅、相位、頻率和/或偏振)的潛力,吸引了全球光子學(xué)界的高度關(guān)注。超構(gòu)表面是由亞波長(zhǎng)大小和周期性散射物體(超構(gòu)原子)排列而成的平面光學(xué)元件。目前,有四種光調(diào)制機(jī)制用于構(gòu)建超構(gòu)表面:諧振納米顆粒的光散射、極化轉(zhuǎn)換中出現(xiàn)的幾何相位(Pancharatnam-Berry相位超構(gòu)表面)、具有可控有效折射率(ERI)柱中的累積傳播相位以及奇點(diǎn)附近的拓?fù)湎辔弧?/p>
通常,超構(gòu)表面包含固有無(wú)源元件,旨在制造后執(zhí)行固定光學(xué)功能。例如,通過(guò)正確選擇超構(gòu)原子的大小和間距,超構(gòu)表面能夠以廣義斯奈爾定律規(guī)定的任意但固定的角度重新定向激光束。顯然,僅無(wú)源超構(gòu)表面無(wú)法用于需要實(shí)時(shí)光束操縱的激光雷達(dá)。因此,具有外部激發(fā)可調(diào)諧光學(xué)特性的材料設(shè)計(jì)或與之結(jié)合的動(dòng)態(tài)超構(gòu)表面,有望成為實(shí)時(shí)光束操縱的理想替代方案。
美國(guó)初創(chuàng)公司LUMOTIVE推出了基于其液晶超構(gòu)表面專(zhuān)利的革命性光束操縱技術(shù),提供了前所未有的探測(cè)范圍、分辨率及幀速率的高性能組合。該方案證明可以構(gòu)建小型化、可擴(kuò)展的激光雷達(dá),但它涉及復(fù)雜的電子架構(gòu),并且對(duì)于金屬超構(gòu)表面構(gòu)建模塊,可能會(huì)出現(xiàn)嚴(yán)重的光學(xué)損耗。
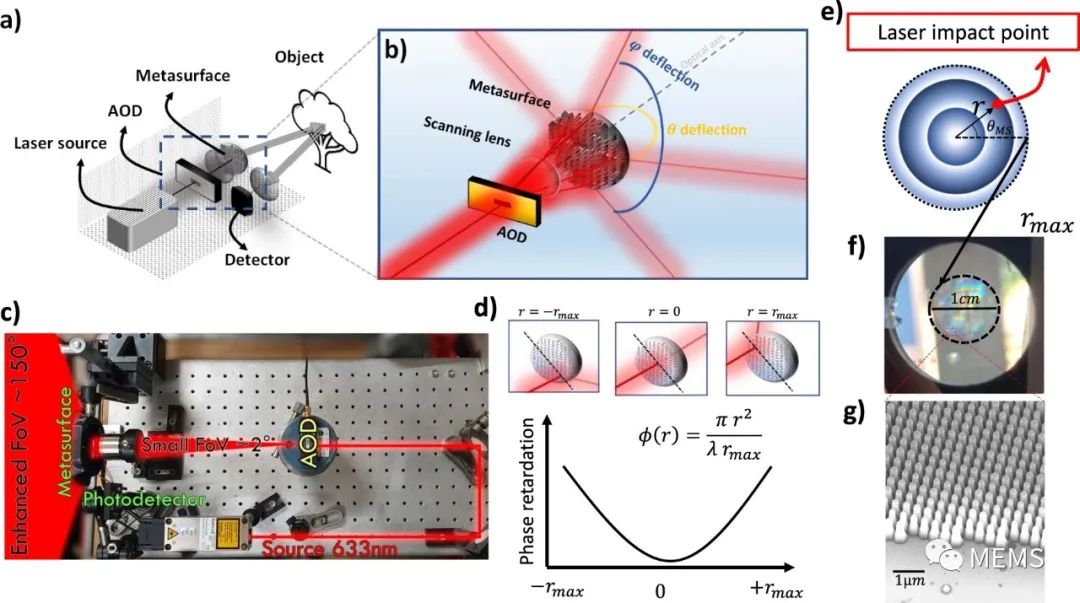
據(jù)麥姆斯咨詢(xún)介紹,法國(guó)蔚藍(lán)海岸大學(xué)(Université Cote d’Azur)的一支研究團(tuán)隊(duì)提出了一種替代的高頻光束操縱方案,利用無(wú)源超構(gòu)表面的光偏轉(zhuǎn)能力,將激光雷達(dá)視場(chǎng)擴(kuò)展到150° ×?150°,并能同時(shí)實(shí)現(xiàn)低分辨率和高分辨率多區(qū)域成像。研究人員采用與商用AOD級(jí)聯(lián)的ERI多光束偏轉(zhuǎn)超構(gòu)表面。該系統(tǒng)在光束掃描性能、工作波長(zhǎng)和材料方面具有很大的靈活性。
角分辨率是指系統(tǒng)區(qū)分相鄰目標(biāo)及檢索形狀的能力,對(duì)于需要同時(shí)進(jìn)行遠(yuǎn)距離和近距離探測(cè)的應(yīng)用非常重要。研究人員開(kāi)發(fā)的多區(qū)域激光雷達(dá)成像系統(tǒng)可以通過(guò)高幀速率同時(shí)采集具有不同空間分辨率的高場(chǎng)和低場(chǎng)區(qū)域來(lái)模擬人類(lèi)視覺(jué)。超構(gòu)表面極高的設(shè)計(jì)靈活性為激光雷達(dá)系統(tǒng)提供了極具前景的成像能力,有望開(kāi)辟新的工業(yè)應(yīng)用。
超構(gòu)表面增強(qiáng)視場(chǎng)激光雷達(dá)概念設(shè)計(jì)
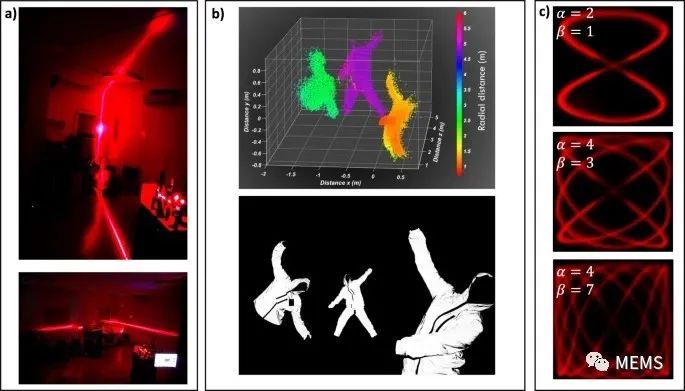
3D成像及廣角掃描性能
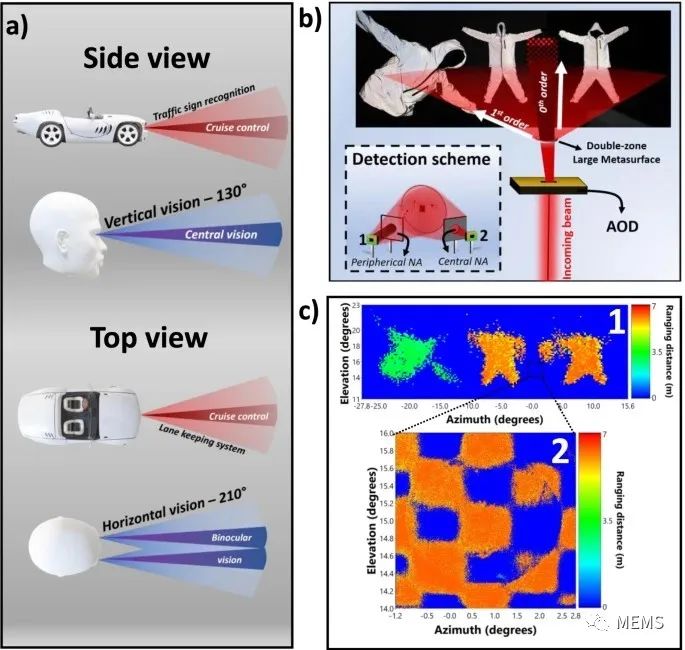
模擬人類(lèi)視覺(jué)的多區(qū)域成像
該方案還提供了隨機(jī)訪(fǎng)問(wèn)光束控制功能。超構(gòu)表面在波前工程中的多功能性可以提高同時(shí)定位和測(cè)繪算法的能力。將該系統(tǒng)集成到ADAS中,可以為中/遠(yuǎn)距離感知提供顛覆性解決方案,其中,中央視圖探測(cè)前方行車(chē)場(chǎng)景,而周邊視圖可以為行人安全提供額外的感知。
研究人員最后演示了實(shí)時(shí)成像的時(shí)間事件序列(>1k?fps,1D掃描幀速率高達(dá)MHz)。該系統(tǒng)展示了優(yōu)于現(xiàn)有激光雷達(dá)技術(shù)的性能,能夠大幅減少機(jī)器人和ADAS系統(tǒng)的決策延時(shí),面向未來(lái)應(yīng)用極具前景。
審核編輯:郭婷
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4028瀏覽量
190424 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13932瀏覽量
167017
原文標(biāo)題:超構(gòu)表面增強(qiáng)激光雷達(dá),提升大視場(chǎng)和多區(qū)域成像能力
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
使用BLDC電機(jī)助力機(jī)械掃描激光雷達(dá)實(shí)現(xiàn)360度視場(chǎng)
激光雷達(dá)分類(lèi)以及應(yīng)用
常見(jiàn)激光雷達(dá)種類(lèi)
激光雷達(dá)面臨的機(jī)遇與挑戰(zhàn)
消費(fèi)級(jí)激光雷達(dá)的起航
固態(tài)激光雷達(dá)
激光雷達(dá)
固態(tài)設(shè)計(jì)激光雷達(dá)
激光雷達(dá)除了可以激光測(cè)距外,還可以怎么應(yīng)用?
由iphone12說(shuō)說(shuō)激光雷達(dá) FMCW激光雷達(dá) 精選資料分享
如何使用BLDC電機(jī)助力機(jī)械掃描激光雷達(dá)實(shí)現(xiàn)360度視場(chǎng)
使用BLDC電機(jī)助力機(jī)械掃描激光雷達(dá)實(shí)現(xiàn)360度視場(chǎng)

Lumotive光控超構(gòu)表面技術(shù)開(kāi)發(fā)固態(tài)激光雷達(dá)解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論