") 3種射頻通信天線的全方位仿真分析與研究
3種射頻通信天線的全方位仿真分析與研究
作者:郭軍朝、王斌、張正剛、夏云
電動(dòng)化、智能化、網(wǎng)聯(lián)化、共享化是汽車的技術(shù)大趨勢,而智能座艙是智能化、網(wǎng)聯(lián)化的重要組成部分。智能座艙包含的技術(shù)信息含量很豐富,例如機(jī)械、電磁、軟硬件、環(huán)境感知與識(shí)別等領(lǐng)域。本論文即是以某車型開發(fā)的智能座艙的影音域控制器為研究對象,運(yùn)用基于有限元的射頻仿真技術(shù)對控制器內(nèi)的3個(gè)射頻天線進(jìn)行仿真分析,從天線結(jié)構(gòu)、電磁特性參數(shù)等角度進(jìn)行了深度研究與比較,為天線設(shè)計(jì)指明了方向。
隨著人工智能和車聯(lián)網(wǎng)技術(shù)的不斷發(fā)展,汽車電動(dòng)化、智能化、網(wǎng)聯(lián)化、共享化成為汽車行業(yè)發(fā)展趨勢,這將給人的生活與出行帶來極大變革,汽車座艙形態(tài)、座艙功能、交互方式等也將發(fā)生巨大變化。因此,汽車智能座艙的設(shè)計(jì)成為未來汽車發(fā)展和創(chuàng)新的關(guān)鍵因素,也是打造差異化、吸引用戶的重要因素。智能座艙是傳統(tǒng)汽車產(chǎn)業(yè)演變?yōu)樯鷳B(tài)產(chǎn)業(yè)的切入口,可以衍生出各種新商業(yè)模式。
智能汽車座艙發(fā)展主要經(jīng)歷了四個(gè)階段:包括電子座艙階段、智能助理階段、人機(jī)共駕階段、第三生活空間。當(dāng)前隨著智能汽車在AI算法、智能駕駛上的不斷發(fā)展進(jìn)入了L3級(jí)自動(dòng)駕駛的“人機(jī)共駕階段”。在智能座艙的表現(xiàn)形式為該階段包含對語音控制和手勢控制技術(shù)突破,車內(nèi)軟硬件一體化聚合,實(shí)現(xiàn)車輛感知精細(xì)化,車輛可在上車-行駛-下車的整個(gè)用車周期中,為駕乘人主動(dòng)提供場景化的服務(wù),實(shí)現(xiàn)機(jī)器自主/半自主決策。AI座艙核心價(jià)值將表現(xiàn)為基于場景的主動(dòng)化交互和服務(wù),很多也被稱之為SOA的智能車服務(wù)[1]。
智能座艙顯示呈現(xiàn)3D、多屏化、大屏化及多樣化布局趨勢。在注重場景化交互的時(shí)代里面,座艙布局不再千篇一律。例如除傳統(tǒng)中控儀表設(shè)計(jì)外,中控臺(tái)聯(lián)屏設(shè)計(jì)在2021年被多家主機(jī)廠所應(yīng)用,從雙聯(lián)屏、三聯(lián)屏甚至達(dá)到五聯(lián)屏設(shè)計(jì)。此外,如控制屏、副駕駛娛樂屏、后排顯示屏、透明A柱等新型顯示屏出現(xiàn)在車上,也出現(xiàn)新的布局方式。2022年東風(fēng)皓極車型的兩聯(lián)屏設(shè)計(jì),這些新穎設(shè)計(jì)無疑為新車增添亮點(diǎn)。
整個(gè)智能座艙架構(gòu)一般由3層模型構(gòu)成,即底層、中間層、服務(wù)層。其中,底層是硬件層,包含攝像頭,麥克風(fēng)陣列,內(nèi)嵌式存儲(chǔ)器(磁盤)EMMC、內(nèi)存DDR等。中間層是系統(tǒng)軟件層,包含操作駕駛域系統(tǒng)驅(qū)動(dòng)(Linux/QNX Drive)與座艙域系統(tǒng)驅(qū)動(dòng)(Android DriveSPI);中間層之上是功能軟件層,包含與智能駕駛公用部分的感知軟件,智能座艙自身域的感知軟件,功能安全分析層。車機(jī)端的再向上層是服務(wù)層,包含啟用攝像頭人臉識(shí)別、自動(dòng)語音識(shí)別、數(shù)據(jù)服務(wù)、場景網(wǎng)關(guān)、賬號(hào)鑒權(quán)等[2]。
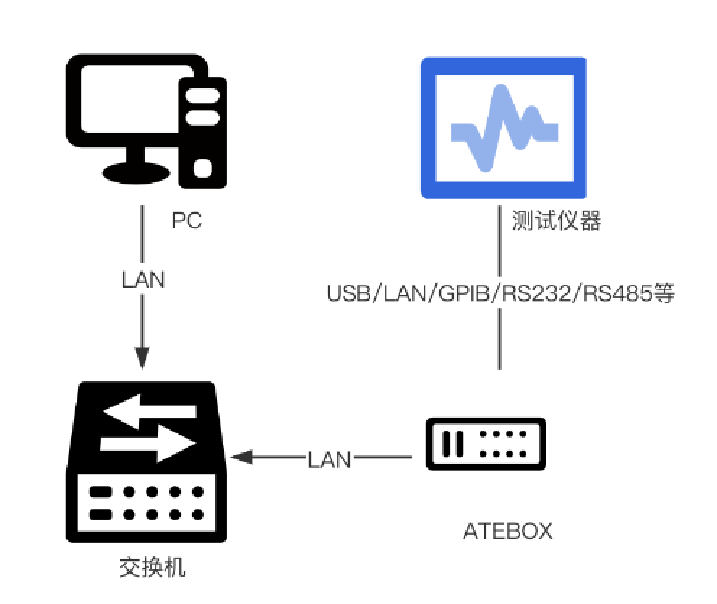
本文是以某車型智能座艙的車機(jī)為基礎(chǔ),硬件端口如圖2所示,主要是以車內(nèi)的3種射頻通信天線為研究對象,從駐波比、S參數(shù)、三維遠(yuǎn)場增益等角度進(jìn)行全方位仿真分析與研究,為設(shè)計(jì)人員深度理解車內(nèi)無線通信、天線設(shè)計(jì)與布局、座艙內(nèi)感知與融合技術(shù),提供了指導(dǎo)。
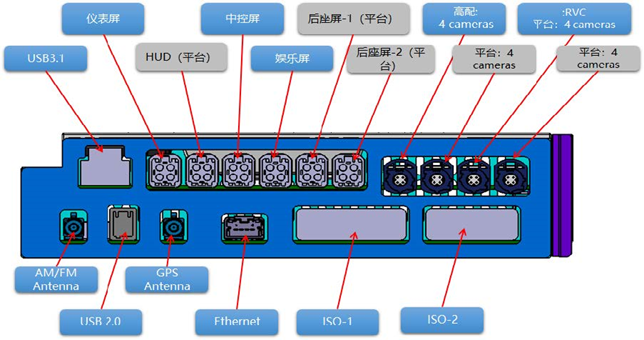
圖2 智能座艙內(nèi)車機(jī)硬件端口
1
天線基本理論
天線的作用是把傳輸結(jié)構(gòu)的導(dǎo)波轉(zhuǎn)換成自由空間波。隨著智能化、網(wǎng)聯(lián)化技術(shù)在汽車上的應(yīng)用,車內(nèi)短距無線通信、車外長距無線通信、車與星鏈廣距無線通信功能使得不同頻段的車載天線使用種類、數(shù)量日趨增多[3]。
具備智能化、網(wǎng)聯(lián)化車輛一般都是通過無線系統(tǒng)與道路指示燈、前后方車輛、整車廠遠(yuǎn)程服務(wù)、云端安全、地表基站及衛(wèi)星定位系統(tǒng)進(jìn)行不間斷實(shí)時(shí)通信。車輛V2X的物聯(lián)網(wǎng)如圖3所示,萬物互聯(lián)之間的無線通信與射頻天線是息息相關(guān)的。
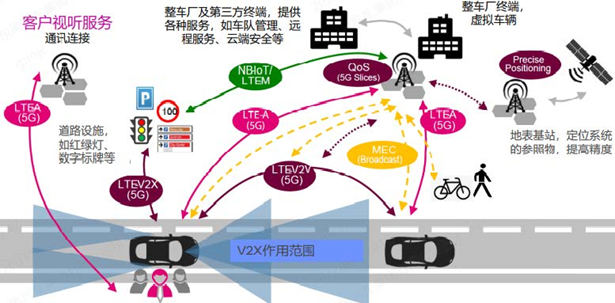
圖3 車輛V2X與多領(lǐng)域的無線通信
例如收音FM/AM天線、GPS導(dǎo)航天線、5G天線、后風(fēng)窗天線、北斗天線等傳統(tǒng)天線;又如毫米波雷達(dá)陣列天線等與主動(dòng)安全有關(guān)的天線陣列,如圖4所示。

圖4 車載多種類型天線
雖然車載天線種類很多,但依然有規(guī)律可尋,可按照車載天線電磁頻譜分布的規(guī)律進(jìn)行系統(tǒng)研究[4]。如圖5所示,電磁頻譜頻率從左到右逐漸增大,對應(yīng)工作頻段的天線種類、形狀也在改變。由此可對車載天線開展從低頻到高頻的有序的天線單體研究,進(jìn)而開展車身+天線的聯(lián)合仿真研究,還可開展車載多天線隔離度的研究。
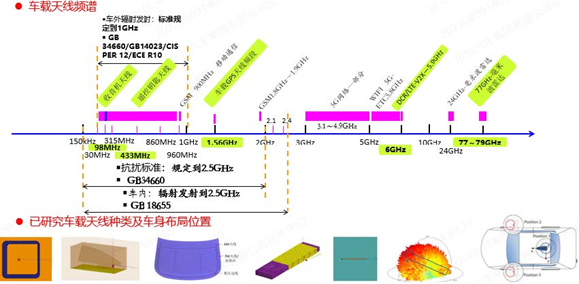
圖5 車載天線種類與電磁頻率分布
最簡單的天線即是電基本振子,又稱電流元或者電偶極子,如圖6所示,它是一段高頻電流直導(dǎo)線,其長度dl<<波長λ,其截面半徑a<<dl。導(dǎo)線上的電流處處等幅同相。這樣的電基本振子可以組成實(shí)際的復(fù)雜天線,所以電基本振子的輻射特性是研究復(fù)雜天線輻射特性的基礎(chǔ)[5]。
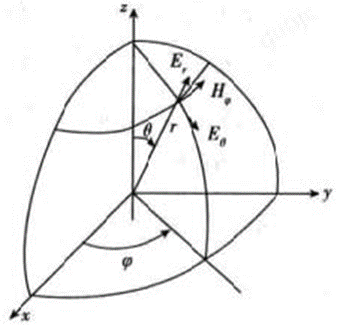
圖6 電基本陣子輻射場
電基本振子上的電流大小使用I表示,則矢量位A可以表示為:

在球坐標(biāo)系下,由矢量位A可得輻射磁場H:
根據(jù)麥克斯韋方程,可得輻射電場E:
式中,E為電場強(qiáng)度,單位為V/m,H為磁場強(qiáng)度,單位是A/m;下標(biāo)r、θ、ψ分別表示球坐標(biāo)系的各個(gè)方向分量;ε0是自由空間介電常數(shù),ε0=1×10-9/36π,單位是F/m;μ0是自由空間磁導(dǎo)率,μ0=4π×10-7,單位是H/m;k是自由空間相位常數(shù),k=2π/λ=ω(μ0ε0)1/2,λ是自由空間波長[6]。
從設(shè)計(jì)、測試、仿真三個(gè)角度研究車載天線時(shí),天線的參數(shù)非常多。一般工程常用的評(píng)價(jià)指標(biāo)有駐波比、S參數(shù)、三維遠(yuǎn)場增益、E面增益、H面增益等。
2
某車型智能座艙影音域控制器
以博世經(jīng)典的五域分類拆分整車為動(dòng)力域(安全)、底盤域(車輛運(yùn)動(dòng))、座艙域/智能信息域(娛樂信息)、自動(dòng)駕駛域(輔助駕駛)和車身域(車身電子), 這五大域控制模塊較為完備的集成了L3 及以上級(jí)別自動(dòng)駕駛車輛的所有控制功能。
座艙域/智能信息域(娛樂信息)傳統(tǒng)座艙域是由幾個(gè)分散子系統(tǒng)或單獨(dú)模塊組成,這種架構(gòu)無法支持多屏聯(lián)動(dòng)、多屏駕駛等復(fù)雜電子座艙功能,因此催生出座艙域控制器這種域集中式的計(jì)算平臺(tái)。座艙域控制器(DCU)通過以太網(wǎng)/MOST/CAN,實(shí)現(xiàn)抬頭顯示、儀表盤、導(dǎo)航等部件的融合,不僅具有傳統(tǒng)座艙電子部件,還進(jìn)一步整合智能駕駛 ADAS 系統(tǒng)和車聯(lián)網(wǎng) V2X 系統(tǒng),從而進(jìn)一步優(yōu)化智能駕駛、車載互聯(lián)、信息娛樂等功能[7]。
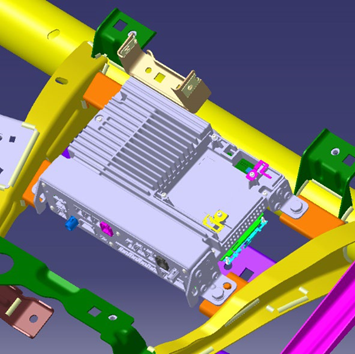
本論文是以現(xiàn)開發(fā)某車型智能座艙中的影音域控制器為研究對象,影音域控制器與IP橫梁、天線罩、編號(hào)2和3的射頻天線、編號(hào)4的射頻天線,分別如圖7 a、b、c、d所示。
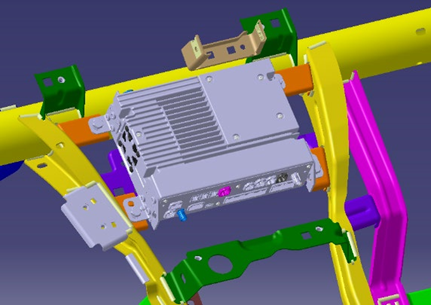
a影音域控制器與IP橫梁
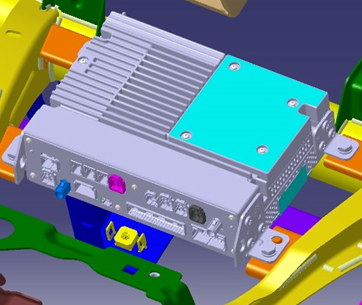
b 影音域控制器上殼的天線罩
c 隱藏天線罩罩后的2個(gè)射頻天線
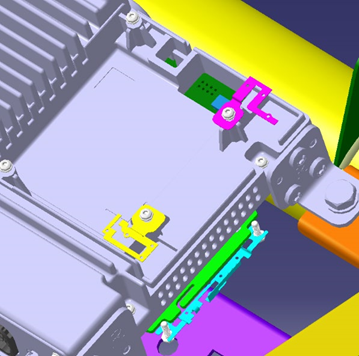
d 隱藏側(cè)面塑料件后的1個(gè)射頻天線
圖7 某車型影音域控制器實(shí)車布置
3
射頻天線結(jié)構(gòu)
倒F天線就像是一個(gè)倒著寫的F一樣,兩個(gè)腳,一個(gè)是饋點(diǎn),一個(gè)是短路點(diǎn)。倒F天線由金屬線輻射體換成金屬板,這樣可以展寬頻寬。PIFA天線在其結(jié)構(gòu)中已經(jīng)包含有接地金屬面,可以降低對模塊中接地金屬面的敏感度,所以非常適合用在車機(jī)內(nèi)短距無線通信,手機(jī)藍(lán)牙模塊裝置等場合[8]。
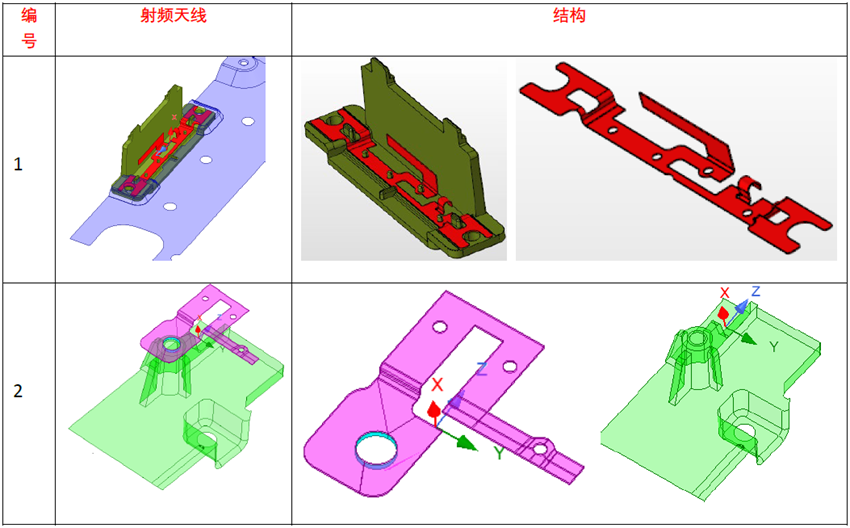
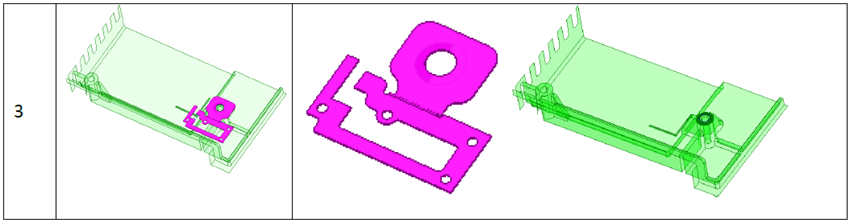
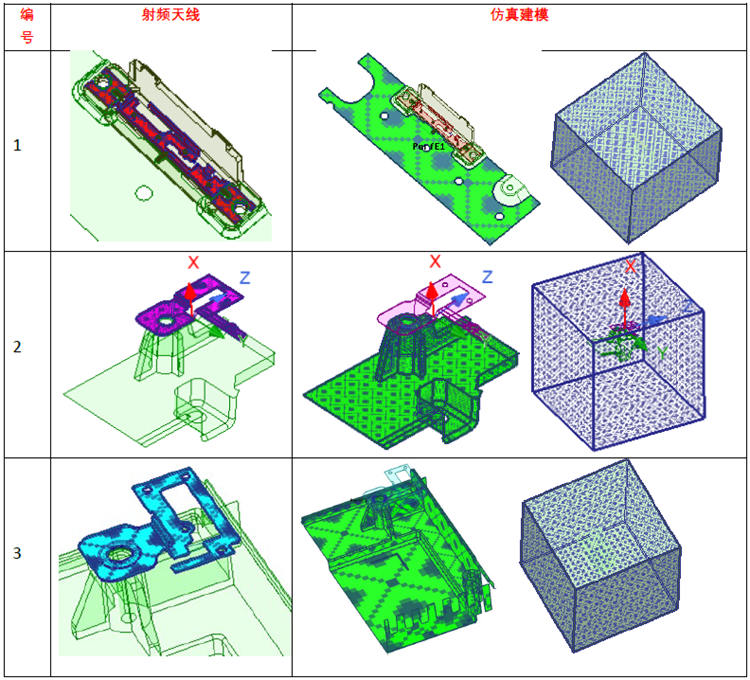
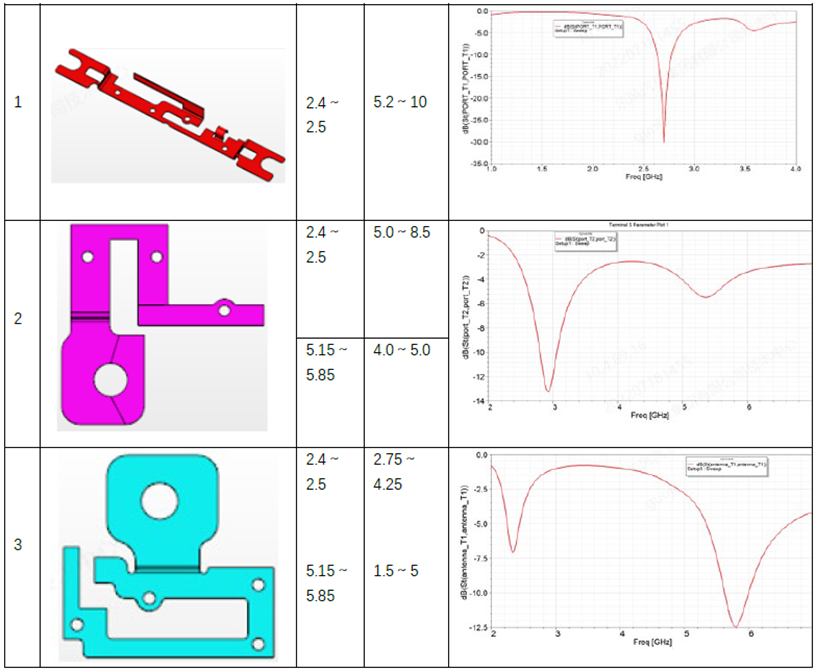
本文所述智能座艙影音域控制器的射頻天線有3個(gè),具體結(jié)構(gòu)及周圍環(huán)境件如表1所示。分析三種天線的特點(diǎn)可得都是平面倒F天線的變形。
表1 三款射頻天線
4
射頻天線仿真建模
運(yùn)用Ansys公司的HFSS模塊仿真分析射頻天線,需要對天線、基材、控制器殼體、介質(zhì)分別設(shè)置相關(guān)的材料,并對金屬設(shè)置相關(guān)的理想導(dǎo)體邊界條件,施加激勵(lì)邊界條件、創(chuàng)建相關(guān)的三維空間計(jì)算域[9]。
本文影音域控制器中的三個(gè)天線的邊界條件、計(jì)算域如表2所示,為減少計(jì)算量,本文對影音域控制器的殼體僅取了部分區(qū)域進(jìn)行計(jì)算。
表2 三款射頻天線邊界及周圍計(jì)算域
5
射頻天線輻射特性分析
射頻天線的電磁輻射參數(shù)很多,例如駐波比、S參數(shù)、三維遠(yuǎn)場增益等。其中,駐波比全稱為電壓駐波比,又名VSWR和SWR,為英文Voltage Standing Wave Ratio的簡寫。指駐波波腹電壓與波谷電壓幅度之比,又稱為駐波系數(shù)、駐波比。駐波比等于1時(shí),表示饋線和天線的阻抗完全匹配,此時(shí)高頻能量全部被天線輻射出去,沒有能量的反射損耗;駐波比為無窮大時(shí),表示全反射,能量完全沒有輻射出去。
天線S參數(shù)的理解:1)S11 是S參數(shù)中的一個(gè),表示回波損耗特性,一般通過網(wǎng)絡(luò)分析儀來看其損耗的dB值和阻抗特性。此參數(shù)表示天線的發(fā)射效率好不好,數(shù)值越大,表示天線本身反射回來的能量越大,這樣天線的效率就越差。2)波不通過傳輸線,直接在天線饋電處對天線進(jìn)行激勵(lì),在仿真軟件中,一般天線饋電處采用端口激勵(lì),此處認(rèn)為端口已匹配好,若在該端口監(jiān)測到反射波,那么這個(gè)反射波也不是由于該端口處沒有匹配好造成的,而是在波傳播方向上天線阻抗不匹配以及環(huán)境的反射所致。3)波通過傳輸線,連接天線,通過激勵(lì)傳輸線的端口,進(jìn)而將波的能量通過傳輸線輸送給天線,通過天線將電磁波輻射出去。
增益是指在輸入功率相等條件下,天線在最大輻射方向上某點(diǎn)的功率密度和理想的無方向性天線在同一點(diǎn)處的功率密度(或場強(qiáng)振幅的平方值)之比。天線效率是指天線輻射功率與輸入到天線的總功率之比。增益是綜合衡量天線能量轉(zhuǎn)換和方向特性的參數(shù),它是方向性系數(shù)與天線效率的乘積[10]。
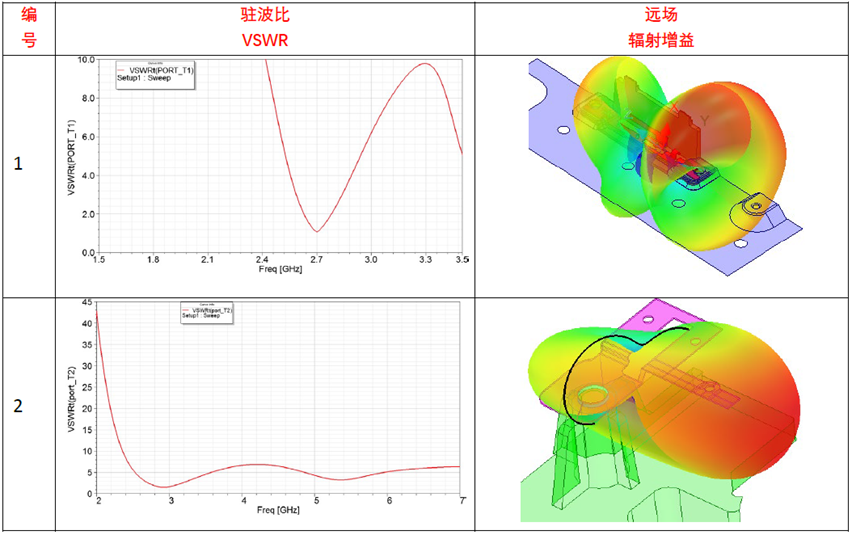
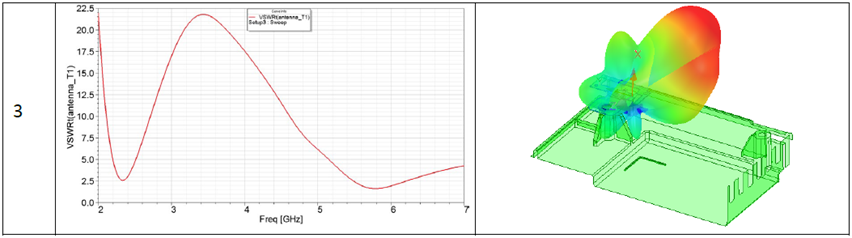
本論文仿真研究得到的三個(gè)射頻天線駐波比參數(shù)、遠(yuǎn)場輻射增益的比較如表3所示。
表3 三個(gè)射頻天線的駐波比、遠(yuǎn)場輻射增益分析
6
天線參數(shù)比較分析
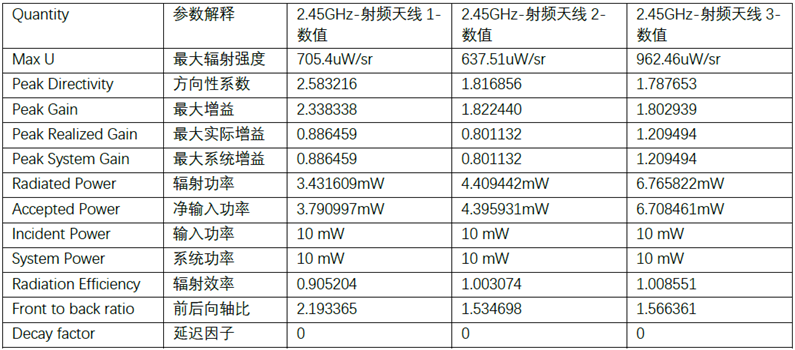
為橫向比較三個(gè)射頻天線的不同,本文詳細(xì)分析射頻天線的參數(shù),例如最大輻射強(qiáng)度、方向性系數(shù)、最大增益、最大實(shí)際與系統(tǒng)增益、輻射功率、凈輸入功率、輸入功率、輻射效率、前后向軸比、延遲因子等參數(shù)[11]。
本文研究的三個(gè)射頻天線的參數(shù)如表4所示,表中5列分別是變量、參數(shù)解釋,天線1工作2.45GHz時(shí)的最大輻射強(qiáng)度、方向性系數(shù)、增益與功率及效率,天線2工作在2.45GHz時(shí)對應(yīng)的參數(shù),天線3工作在2.45GHz時(shí)對應(yīng)的天線參數(shù)。
表4 三種天線在2.45GHz時(shí)的多參數(shù)的比較
天線形狀不同使得天線的工作頻段也不同,也影響著駐波比的大小及S參數(shù)。一般是希望S參數(shù)波谷點(diǎn)與天線工作頻點(diǎn)相對應(yīng),駐波比參數(shù)一般在2~5范圍之內(nèi)[12]。本文研究的三個(gè)射頻天線的駐波比、S參數(shù)分析如表5所示。
表5 三個(gè)射頻天線的駐波比與s參數(shù)比較

7
結(jié)論
本論文首先簡要介紹汽車智能化核心組成-智能座艙的構(gòu)成與功能,進(jìn)而引出無線通信技術(shù)在智能座艙中的應(yīng)用是日趨廣泛的,并且從電磁頻譜角度闡述天線在汽車開發(fā)中的應(yīng)用。其次詳細(xì)描述射頻技術(shù)在車機(jī)中的應(yīng)用,梳理總結(jié)如下:
本論文運(yùn)用Ansys公司基于有限元原理的HFSS模塊,對在研車型的智能駕駛座艙的影音域控制器內(nèi)射頻天線進(jìn)行電磁仿真分析與研究,并且仔細(xì)對比了三個(gè)天線的電磁輻射特性。
從工作頻率角度分析,建議調(diào)整射頻天線1設(shè)計(jì)方案,使天線諧振頻率從2.7GHz變?yōu)?.45GHz;從駐波比角度分析,建議對射頻天線2進(jìn)行設(shè)計(jì)方案修改,使得其駐波比在2以下;從最大輻射場強(qiáng)、輻射效率角度分析,射頻天線3設(shè)計(jì)方案是比較合理的。
本文在仿真三款射頻天線時(shí),未考慮同軸線束、錫焊接地點(diǎn)等細(xì)節(jié)對阻抗的影響,今后采取措施使得天線輸入阻抗在合理范圍內(nèi)是后續(xù)工作研究的重點(diǎn)。
審核編輯:郭婷
-
射頻
+關(guān)注
關(guān)注
104文章
5620瀏覽量
168230 -
控制器
+關(guān)注
關(guān)注
112文章
16448瀏覽量
179480 -
仿真
+關(guān)注
關(guān)注
50文章
4124瀏覽量
134005
原文標(biāo)題:論文及案例優(yōu)秀作品 | 射頻天線仿真技術(shù)在某車型智能座艙開發(fā)中的應(yīng)用
文章出處:【微信號(hào):西莫電機(jī)論壇,微信公眾號(hào):西莫電機(jī)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
射頻網(wǎng)絡(luò)分析儀的原理和應(yīng)用場景

射頻分析儀的技術(shù)原理和應(yīng)用場景
全方位解剖MOS管

射頻電路分析 仿真 號(hào)完整性分析和自動(dòng)控制理論
GPS信號(hào)手持金屬探測器:打造全方位探測的體驗(yàn)
天線自動(dòng)測試系統(tǒng)如何自動(dòng)化測試S參數(shù),評(píng)估射頻天線性能?
射頻天線在無線局域網(wǎng)中的應(yīng)用
射頻天線的發(fā)展歷史
天線設(shè)計(jì)和射頻布局指南
pcb射頻天線的邊際效應(yīng)有哪些
華為射頻天線口匹配設(shè)計(jì)及調(diào)試指導(dǎo)

射頻分析儀的工作原理和基本結(jié)構(gòu)
沁恒全系PD產(chǎn)品亮相亞洲充電展,全方位賦能Type-C應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論