 車路協同系統在智慧交通中的應用場景
車路協同系統在智慧交通中的應用場景
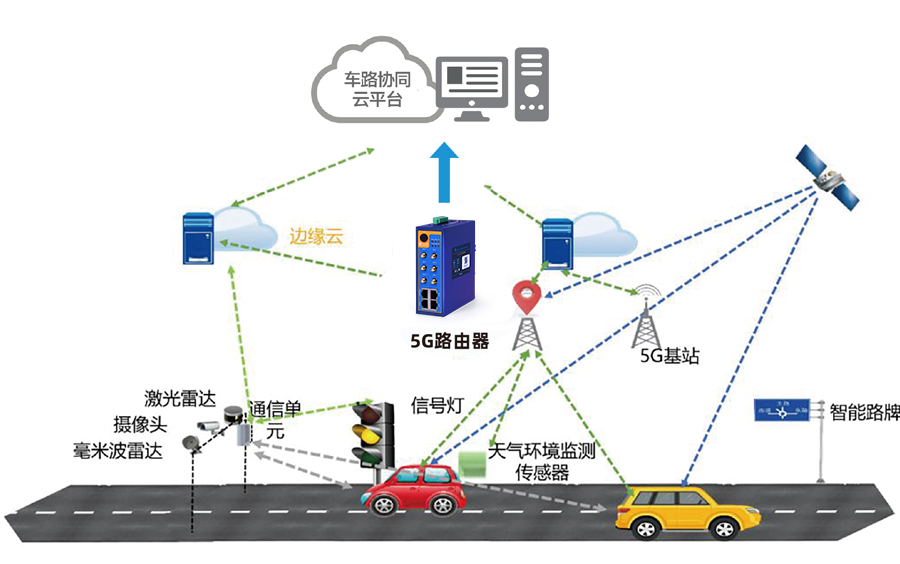
車路協同,即利用5G等車載網絡傳感器與高精度地圖的緊密配合獲知路況,全方位實時車車、車路動態實時信息交互,并在全時空動態交通信息采集與融合的基礎上開展車輛主動安全控制和道路協同管理,充分實現人車路的有效協同,保證交通安全,提高通行效率,從而形成安全、高效和環保的道路交通系統,車路協同已經成為智慧交通規劃中的重要組成部分。
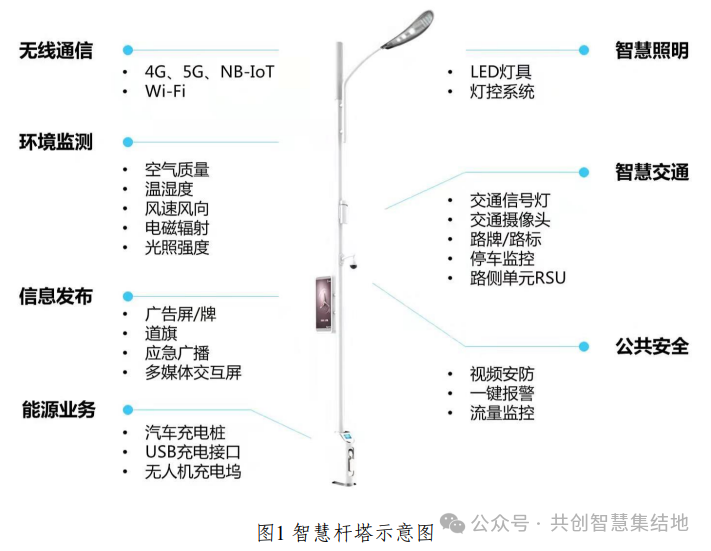
與傳統的單車端系統或者單路側系統相比,車路協同系統更加側重路端、云端與車輛的交互,是囊括車端感應、路端感應、通信技術與云控技術的整體解決方案。車路協同主要包括四大關鍵技術:智能車載技術、智能路側技術、通信技術、云控技術。智能車載指安裝在車輛終端,是拓寬駕駛員視野、增加駕駛員對行車環境和車輛運行狀態的感知、加強行車安全的單元;智能路側即采集道路狀況、交通狀況,通過通訊網絡將信息傳遞至指揮中心或路側處理單元處理,通過網絡傳遞至有信息請求的車載端;通信技術指車載端與路側端之間的通信,用于車與路信息采集、路況信息采集,以及車與車之間的通信中繼;云控技術即具備數據存儲、計算、決策的云端技術。要全面實現車路協同,人工智能技術在其中發揮關鍵作用。通過車路云圖全面打通車路協同,如下圖中所示,人工智能技術在車路協同中的應用場景及飛槳在車路協同3D感知中的應用效果。
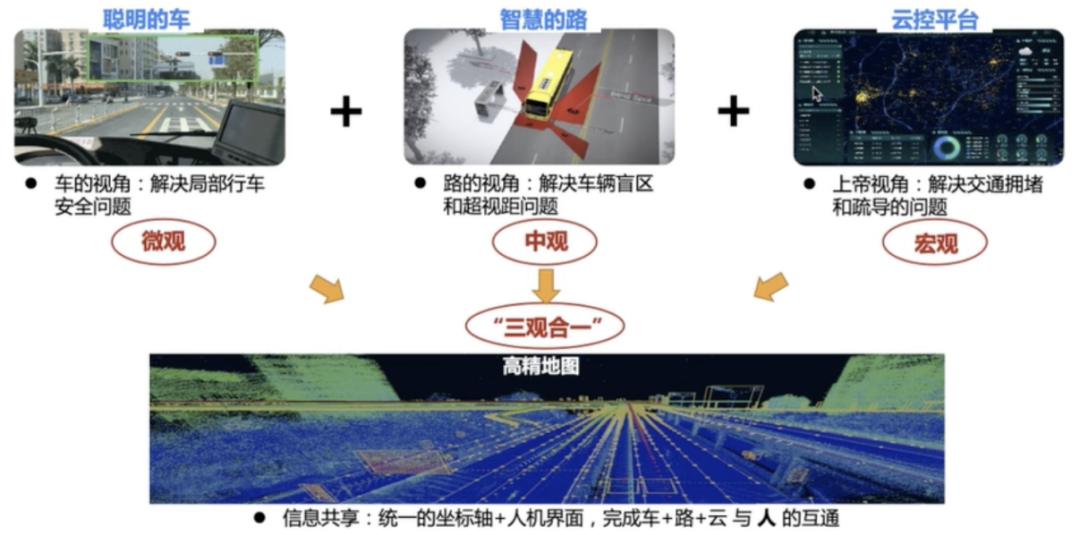
圖2:車路云圖四維一體全面打通車路協同
車路協同一些典型應用場景及效果如下圖所示:

圖3:車路協同典型應用場景
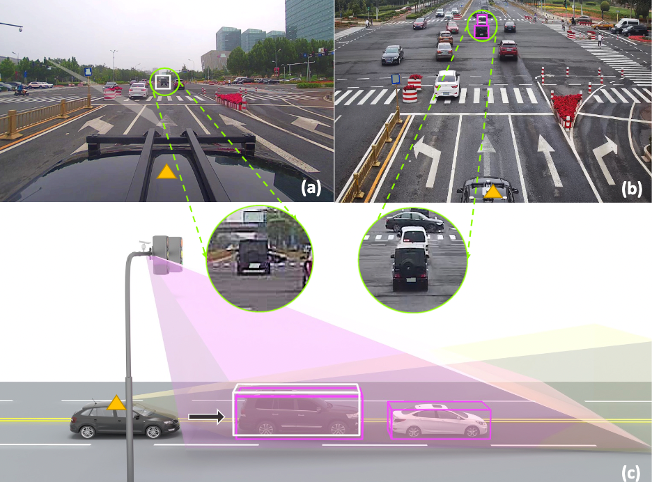
圖4:北京亦莊車路協同3D感知
在車路協同領域,百度率先提出車路協同方案,是車路協同方案的堅定探索者和推動者。在2018年年底正式開源Apollo車路協同技術方案,向業界開放車路協同領域的技術和服務。通過在平臺化、生態化、商業化等各個領域深耕實踐,經歷4年發展歷程,百度積累了涵蓋車、路、云、圖一體化的解決方案。百度始終保持對于技術和方案全面開放的態度以及對行業的生態促進的理念,在百度飛槳深度學習開源開放平臺上開源開放了眾多技術能力,從而支持企業車路協同場景的開發和構建,主旨在于幫助企業建設多元化和規范化的智能道路基礎設施,降低開發者開發成本,豐富車路協同產業生態,為行業的健康發展貢獻百度力量。如下圖所示,飛槳全面支持車路協同場景構建全景和基于飛槳的百度Apollo車路協同開放平臺及長沙高新區智慧交通車路協同應用展示。

圖5:百度飛槳全面支持車路協同場景構建

圖6:基于飛槳的百度Apollo車路協同開放平臺

圖7:長沙高新區智慧交通-車路協同賦能智能信控
場景應用
場景一
視覺3D道路障礙物檢測
3D道路障礙物檢測旨在定位出車輛及道路障礙物在三維空間中的位置、大小和方向,并識別出物體的類別屬性。作為車路協同和自動駕駛感知系統中的重要模塊,3D障礙物檢測任務存在設計復雜、開發繁瑣、精度和速度要求高等痛點和難點問題。飛槳與Apollo聯合打造的Paddle3D深度學習3D感知套件聚合圖像的單目、BEV檢測模型、基于點云的稀疏三維卷積等多種前沿和特色三維目標檢測模型,靈活設計開發框架,涵蓋精度調優策略、極致優化模型的性能,助力開發者便捷地完成障礙物檢測從訓練到部署的全流程應用。
場景二
車牌識別
車牌識別廣泛應用于車輛出入場識別和車路協同車輛識別等場景中,在實際的使用過程中,存在圖像質量參差不齊、角度傾斜、光照不足、車牌在圖像中尺寸差異大和使用設備算力有限等問題和難點。針對上述難點問題,通過使用飛槳PaddleOCR開發套件提供的自研PP系列模型PP-OCRv3,結合飛槳深度學習模型壓縮工具庫PaddleSlim完成車牌識別模型的訓練和量化,在CCPD新能源數據集達到99%的檢測精度和94%的識別精度,模型大小為12.8M(檢測2.5M+識別10.3M),量化后模型體積進一步壓縮到5.8M(檢測1M+識別4.8M),推理速度提升25%。
場景三眾包建圖方案保持地圖高鮮度
眾包建圖旨在利用大規模的量產車輛對高精地圖進行更新,實現低成本高效的地圖更新工作。眾包建圖對于環境的感知通常采用全景分割來實現。在實際業務中,依賴人工來完成全景分割模型訓練所需數據標注,時間及標注成本高昂。針對以上問題,采用飛槳PaddleSeg交互式分割技術,通過少量交互信息便能高效完成復雜道路場景分割標注,有效降低標注成本,提升標注精度,極大加速全景分割模型訓練并提升最終模型效果。
審核編輯:郭婷
-
傳感器
+關注
關注
2553文章
51406瀏覽量
756624 -
智慧交通
+關注
關注
5文章
716瀏覽量
26996
原文標題:AI賦能智能交通“車路協同”場景,實現“聰明的車、智慧的路”!
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
車路云協同如何讓Robotaxi加速實現
V2X車路協同系統

V2X車路協同系統

V2X車路協同系統


系統放大器的技術原理和應用場景

智慧交通:關鍵技術及應用場景
雷森受邀參與新一代“車路云未來交通”技術沙龍活動
智慧交通:實現智能交通管理的新方向
四維圖新張建平:緊抓車路云一體化發展機遇,推動更多應用場景落地

助力車路協同,基于i.MX8MPlus核心板的路側單元主控方案






 工商網監
工商網監
評論