 FreeRTOS信號量使用教程
FreeRTOS信號量使用教程
11.1 信號量說明
信號量是操作系統中重要的一部分,信號量一般用來進行資源管理和任務同步, FreeRTOS中信號量又分為二值信號量、 計數型信號量、互斥信號量和遞歸互斥信號量。信號量在實際應用中最廣泛的兩個用途是:
- 臨界資源的鎖機制:用于控制共享資源訪問的場景相當于一個上鎖機制, 代碼只有獲得了這個鎖的鑰匙才能夠執行。
- 多個任務同步機制:用于任務與任務或中斷與任務之間的同步。
在編寫中斷服務函數的時候我們都知道一定要快進快出,中斷服務函數里面不能放太多的代碼,否則的話會影響的中斷的實時性。 裸機編寫中斷服務函數的時候一般都只是在中斷服務函數中打個標記,然后在其他的地方根據標記來做具體的處理過程。在使用 RTOS 系統的時候我們就可以借助信號量完成此功能, 當中斷發生的時候就釋放信號量,中斷服務函數不做具體的處理。具體的處理過程做成一個任務,這個任務會獲取信號量,如果獲取到信號量就說明中斷發生了,那么就開始完成相應的處理,這樣做的好處就是中斷執行時間非常短。 這個例子就是中斷與任務之間使用信號量來完成同步,當然了, 任務與任務之間也可以使用信號量來完成同步。
在實際4G/WiFi等網絡應用中,一般最簡單的方法就是使用一個任務去查詢 4G/WiFi 模塊是否有數據到來,當有數據的時候就處理這個網絡數據。但這樣使用輪詢的方式是很浪費CPU 資源的,而且也阻止了其他任務的運行。一種理想的解決方法應該是當沒有網絡數據的時候網絡任務就進入阻塞態,把 CPU 讓給其他的任務,當有數據的時候網絡任務才去執行。現在使用二值信號量就可以實現這樣的功能,任務通過獲取信號量來判斷是否有網絡數據,沒有的話就進入阻塞態,而網絡中斷服務函數通過釋放信號量來通知任務以太網外設接收到了網絡數據,網絡任務可以去提取處理了。網絡任務只是在一直的獲取二值信號量,它不會釋放信號量,而中斷服務函數是一直在釋放信號量,它不會獲取信號量。
接下來,我們以二值信號量為例,講解信號量實現任務同步的大致流程。其實,二值信號量其實就是一個只有一個隊列項的隊列,這個特殊的隊列要么是滿的,要么是空的。二值信號量通常用于互斥訪問或任務同步,它與互斥信號量非常類似,但是還是有一些細微的差別,互斥信號量擁有優先級繼承機制,二值信號量沒有優先級繼承。因此二值信號另更適合用于同步(任務與任務或任務與中斷的同步),而互斥信號量適合用于簡單的互斥訪問。
- 任務獲取信號量有效
如下圖所示,任務Task通過調用 xSemaphoreTake() 函數獲取信號量,但此時二值信號量無效,所以任務Task進入到阻塞態。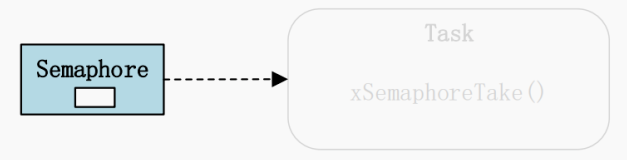
- 中斷釋放信號量
當有數據到來產生中斷后,在中斷服務處理程序中通過調用 xSemaphoreGiveFromISR() 函數釋放信號量,此后二值信號量有效。
- 任務獲取信號量有效
由于此時信號量已經有效了,所以任務 Task 獲取信號量成功,任務從阻塞態解除,開始執行相關的處理過程。
- 任務再次進入阻塞
由于任務一般是一個大的死循環,所以在任務做完相關處理以后就會再次調用 xSemaphoreTake() 函數獲取信號量,但此時信號量已經失效,因此任務將進入到狀態1下阻塞等待信號量有效。
11.2 信號量API說明
11.2.1 獲取信號量
不管是二值信號量、計數型信號量還是互斥信號量,它們都使用以下兩個函數獲取信號量。
/*
參數:
xSemaphore: 要獲取的信號量句柄。
?? xBlockTime: 阻塞時間。??
返回值:
pdTRUE: 獲取信號量成功。
pdFALSE: 超時,獲取信號量失敗。
*/
BaseType_t xSemaphoreTake(SemaphoreHandle_t xSemaphore,TickType_t xBlockTime)
/*
說明: 此函數用于在中斷服務函數中獲取信號量, 此函數用于獲取二值信號量和計數型信號量,絕對不能使用此函數來獲取互斥信號量。
參數: xSemaphore: 要獲取的信號量句柄。
pxHigherPriorityTaskWoken: 標記退出此函數以后是否進行任務切換,這個變量的值由這三個函數來設置的,用戶不用進行設置,
用戶只需要提供一個變量來保存這個值就行了。當此值為 pdTRUE 的時候在退出中斷服務函數之前一定要進行一次任務切換。
回值: pdPASS: 獲取信號量成功。
pdFALSE: 獲取信號量失敗。
*/
BaseType_t xSemaphoreTakeFromISR(SemaphoreHandle_t xSemaphore,BaseType_t * pxHigherPriorityTaskWoken)
11.2.2 釋放信號量
釋放信號量分為任務級和中斷級。不管是二值信號量、計數型信號量還是互斥信號量,它們都使用以下兩個函數釋放信號量。
/*
參數:xSemaphore: 要釋放的信號量句柄。
返回值:
pdPASS: 釋放信號量成功;
errQUEUE_FULL: 釋放信號量失敗。
*/
BaseType_t xSemaphoreGive( xSemaphore )
/*
說明: 此函數用于在中斷中釋放信號量, 此函數只能用來釋放二值信號量和計數型信號量,絕對不能用來在中斷服務函數中釋放互斥信號量。
參數: xSemaphore: 要釋放的信號量句柄。
pxHigherPriorityTaskWoken: 標記退出此函數以后是否進行任務切換,這個變量的值由這三個函數來設置的,用戶不用進行設置,
用戶只需要提供一個變量來保存這個值就行了。當此值為 pdTRUE 的時候在退出中斷服務函數之前一定要進行一次任務切換。
返回值:
pdPASS: 釋放信號量成功。
errQUEUE_FULL: 釋放信號量失敗。
*/
BaseType_t xSemaphoreTakeFromISR(SemaphoreHandle_t xSemaphore,BaseType_t * pxHigherPriorityTaskWoken)
11.2.3 創建二值信號量
在FreeRTOS中,有兩個函數可以創建二值信號量:
/*
說明: 使用此函數創建二值信號量的話信號量所需要的 RAM 是由 FreeRTOS 的內存管理部分來動態分配的。
返回值:
NULL: 二值信號量創建失敗。
其他值: 創建成功的二值信號量的句柄。
*/
SemaphoreHandle_t xSemaphoreCreateBinary( void )
/*
說明: 此函數也是創建二值信號量的,只不過使用此函數創建二值信號量的話信號量所需要的RAM需要由用戶來分配
參數: pxSemaphoreBuffer: 此參數指向一個 StaticSemaphore_t 類型的變量,用來保存信號量結構體。
返回值:
NULL: 二值信號量創建失敗。
其他值: 創建成功的二值信號量句柄。
*/
SemaphoreHandle_t xSemaphoreCreateBinaryStatic( StaticSemaphore_t *pxSemaphoreBuffer )
11.2.4 創建互斥信號量
在FreeRTOS中,有兩個函數可以創建互斥信號量:
/*
說明:此函數用于創建一個互斥信號量,所需要的內存通過動態內存管理方法分配。
參數:無
返回值:
NULL: 互斥信號量創建失敗。
其他值: 創建成功的互斥信號量的句柄。
*/
SemaphoreHandle_t xSemaphoreCreateMutex( void )
/*
說明: 此函數也是創建互斥信號量的,只不過使用此函數創建互斥信號量的話信號量所需要的RAM 需要由用戶來分配
參數: pxMutexBuffer: 此參數指向一個 StaticSemaphore_t 類型的變量,用來保存信號量結構體。
返回值:
NULL: 互斥信號量創建失敗。
其他值: 創建成功的互斥信號量的句柄。
*/
SemaphoreHandle_t xSemaphoreCreateMutexStatic( StaticSemaphore_t *pxMutexBuffer )
11.2.5 創建計數信號量
在FreeRTOS中,有兩個函數可以創建計數信號量:
/*
說明: 此函數用于創建一個計數型信號量,所需要的內存通過動態內存管理方法分配。
參數:
uxMaxCount: 計數信號量最大計數值,當信號量值等于此值的時候釋放信號量就會失敗。
uxInitialCount: 計數信號量初始值。
返回值:
NULL: 計數型信號量創建失敗。
其他值: 計數型信號量創建成功,返回計數型信號量句柄。
*/
SemaphoreHandle_t xSemaphoreCreateCounting(UBaseType_t uxMaxCount,UBaseType_t uxInitialCount )
/*
說明: 此函數也是用來創建計數型信號量的,使用此函數創建計數型信號量的時候所需要的內存需要由用戶分配。
參數:
uxMaxCount: 計數信號量最大計數值,當信號量值等于此值的時候釋放信號量就會失敗。
uxInitialCount: 計數信號量初始值。
pxSemaphoreBuffer: 指向一個 StaticSemaphore_t 類型的變量,用來保存信號量結構體。
返回值:
NULL: 計數型信號量創建失敗。
其他值: 計數型號量創建成功,返回計數型信號量句柄。
*/
SemaphoreHandle_t xSemaphoreCreateCountingStatic( UBaseType_t uxMaxCount,UBaseType_t uxInitialCount,StaticSemaphore_t * pxSemaphoreBuffer )
11.2.6 遞歸互斥信號量
遞歸互斥信號量可以看是一種特殊的互斥信號量,已經獲取了信號量的任務就不能再次獲取這個互斥量,但是遞歸互斥信號量不同,已經獲取了遞歸互斥信號量的任務可以再次獲取這個遞歸互斥信號量,次數不限。也就是在同一個任務中可以無限次獲取遞歸互斥信號量,中途不需要釋放,而互斥信號量獲取一次后就失效,需要再次釋放才有效。注意:任務獲取多少次遞歸互斥信號量,就要釋放多少次遞歸信號量。
/*
說明: 動態創建遞歸互斥信號量
參數: 無
返回值:創建失敗NULL,創建成功返回信號量句柄。
*/
SemaphoreHandle_t xSemaphoreCreateRecursiveMutex( void )
#define xSemaphoreCreateRecursiveMutex() xQueueCreateMutex( queueQUEUE_TYPE_RECURSIVE_MUTEX )
/*
說明: 靜態創建遞歸互斥信號量
參數: pxMutexBuffer:指向StaticSemaphore_t類型的變量,用來保存信號量結構體。
返回值: 創建失敗NULL,創建成功返回信號量句柄。
*/
SemaphoreHandle_t xSemaphoreCreateRecursiveMutexStatic( StaticSemaphore_t *pxMutexBuffer )
#define xSemaphoreCreateRecursiveMutexStatic( pxStaticSemaphore ) xQueueCreateMutexStatic( queueQUEUE_TYPE_RECURSIVE_MUTEX, pxStaticSemaphore )
/*
說明: 釋放遞歸互斥信號量
參數: xMutex: 信號量句柄
返回值:
pdPASS: 釋放信號量成功
pdFAIL: 釋放信號量失敗
*/
xSemaphoreGiveRecursive( SemaphoreHandle_t xMutex )
#define xSemaphoreGiveRecursive( xMutex ) xQueueGiveMutexRecursive( ( xMutex ) )
/*
說明:獲取遞歸互斥信號量
參數:
xMutex: 信號量句柄
xBlockTime:阻塞時間
返回值:
pdPASS: 獲取信號量成功
pdFAIL: 獲取信號量失敗
*/
xSemaphoreTakeRecursive( SemaphoreHandle_t xMutex, TickType_t xBlockTime );
#define xSemaphoreTakeRecursive( xMutex, xBlockTime )
xQueueTakeMutexRecursive( ( xMutex ), ( xBlockTime ) )
11.3 信號量多任務同步實例
在這里我們將創建兩個Led線程,其中藍色Led線程每隔200ms閃爍一次,而紅色Led線程則每隔1200ms閃爍一次。然后我們使用二值信號量的機制,讓兩個Led線程同步交替閃爍一次。
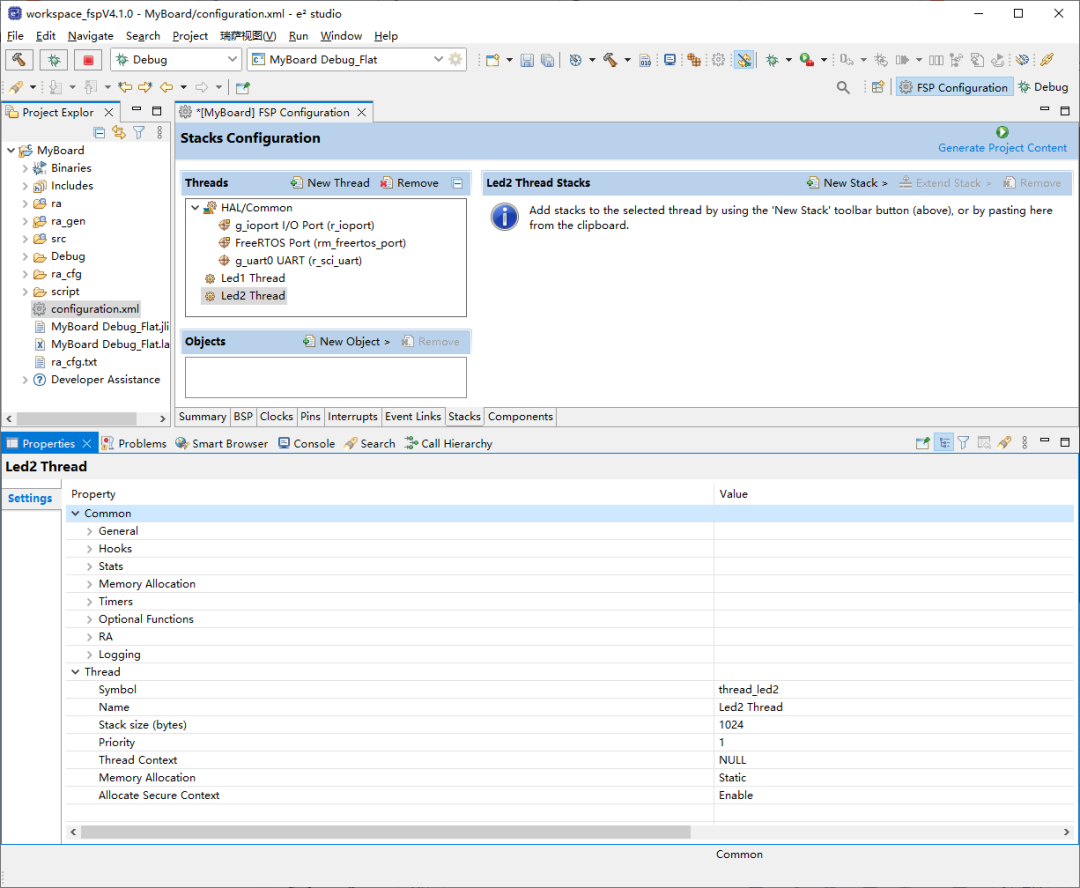
11.3.1 創建兩個線程任務
如下圖所示,單擊窗格頂部的 “New Thread” 按鈕,添加兩個線程分別命名為 thread_led1 和 thread_led2 ,其它的保持默認配置即可,并重新生成代碼。
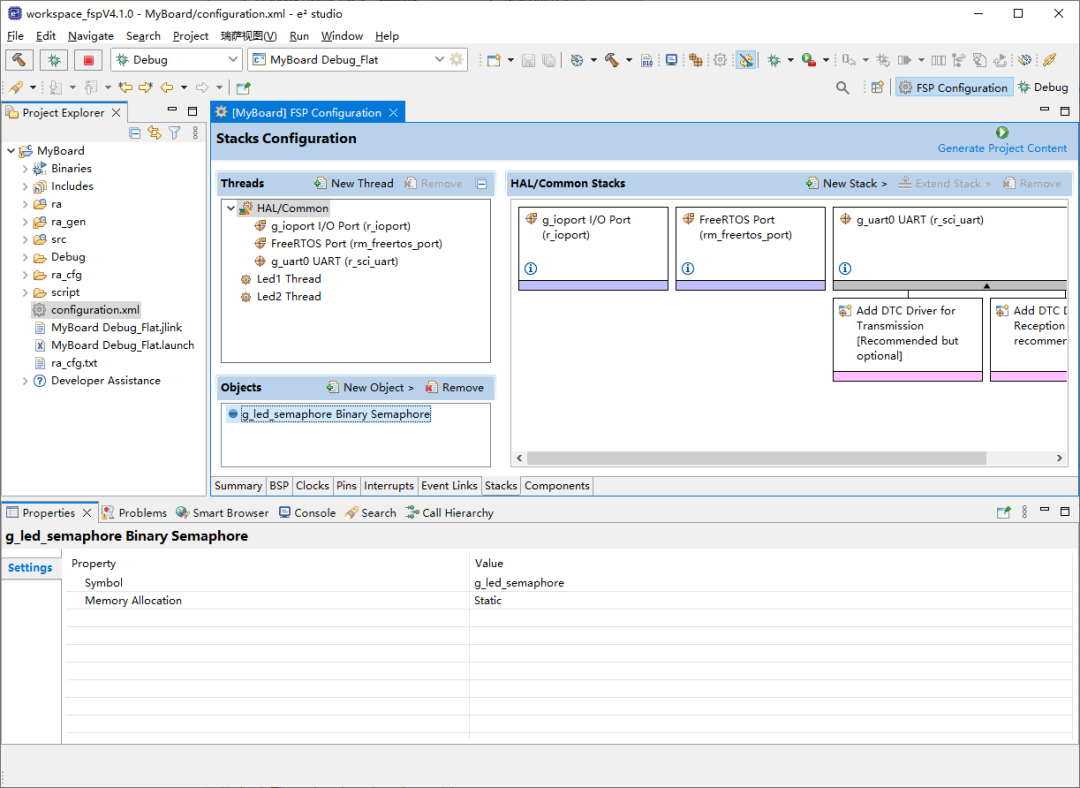
如下圖所示,單擊窗口的 “New Object” 按鈕,選擇 “Binary Semaphore” 添加一個二值信號量,然后修改該信號量的名稱為 g_led_semaphore ,并重新生成代碼。
11.3.2 修改信號量實例代碼
修改 thread_led1_entry.c 源碼如下:
#include "thread_led1.h"
/* Led Thread entry function */
/* pvParameters contains TaskHandle_t */
void thread_led1_entry(void *pvParameters)
{
FSP_PARAMETER_NOT_USED (pvParameters);
R_BSP_PinAccessEnable(); /* Enable access to the PFS registers. */
/* TODO: add your own code here */
while (1)
{
xSemaphoreTake( g_led_semaphore, portMAX_DELAY );
R_BSP_PinWrite(LedRed, BSP_IO_LEVEL_HIGH);
vTaskDelay (600);
R_BSP_PinWrite(LedRed, BSP_IO_LEVEL_LOW);
vTaskDelay (600);
}
}
- 如果不加信號量操作部分代碼,紅色Led將每隔1200ms閃爍一次;
- 這里調用了xSemaphoreTake() 函數來獲取信號量 g_led_semaphore,如果 thread_led2 線程沒有運行并釋放信號量的話,它將會阻塞;
- xSemaphoreTake() 函數在獲取到信號之后,將會讓紅色Led閃爍一次;
- 之后該線程將會再次調用了xSemaphoreTake() 函數,等待 thread_led2 線程釋放信號;
修改 thread_led2_entry.c 源碼如下:
#include "thread_led2.h"
/* Led Thread entry function */
/* pvParameters contains TaskHandle_t */
void thread_led2_entry(void *pvParameters)
{
FSP_PARAMETER_NOT_USED (pvParameters);
R_BSP_PinAccessEnable(); /* Enable access to the PFS registers. */
/* TODO: add your own code here */
while (1)
{
if( pdTRUE == xSemaphoreGive( g_led_semaphore) )
{
R_BSP_PinWrite(LedBlue, BSP_IO_LEVEL_HIGH);
vTaskDelay (100);
R_BSP_PinWrite(LedBlue, BSP_IO_LEVEL_LOW);
vTaskDelay (100);
}
}
}
- 如果不加信號量操作部分代碼,藍色Led將每隔200ms閃爍一次;
- 這里調用了xSemaphoreGive() 函數釋放信號量 g_led_semaphore,用來同步通知 thread_led1 線程運行;
- xSemaphoreGive() 函數在釋放信號之后,如果 thread_led1 沒有來得及獲取信號量的話,則會返回pdFALSE;
- 這樣,如果 thread_led1 沒有運行的話,藍色Led也不會閃爍了,從而實現了兩個線程中的Led同步交替閃爍一次效果了;
-
操作系統
+關注
關注
37文章
6892瀏覽量
123742 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62394 -
信號量
+關注
關注
0文章
53瀏覽量
8373
發布評論請先 登錄
相關推薦
實時操作系統FreeRTOS信號量應用

FreeRTOS信號量的使用與實例
轉:freeRTOS信號量學習
【NUCLEO-F412ZG試用體驗】FreeRTOS_信號量實現任務和中斷的同步
FreeRTOS信號量不能刪除的原因?
【轉載】AT32 FreeRTOS應用筆記
FreeRTOS信號量的相關資料推薦
McuXpresso的靜態庫和IRQ處理程序問題求解
FreeRTOS信號量 & ESP32實戰

FreeRTOS系列第20篇---FreeRTOS信號量API函數





 工商網監
工商網監
評論