") VASS05機器人2.20系統(tǒng)ProConOS_IO生成文件使用的接口
VASS05機器人2.20系統(tǒng)ProConOS_IO生成文件使用的接口
生成文件使用的接口:
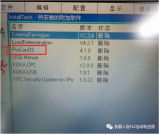
2.選擇激活ProConOS_IO,激活軟件后開始進行尋找設備IO激活外部軸E1.
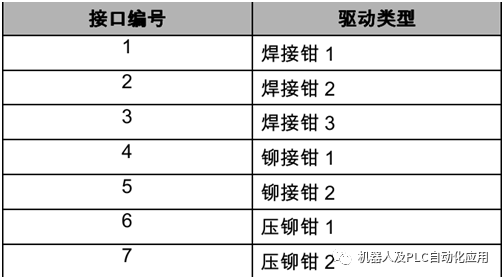
IO區(qū)域 焊鉗1從705開始 焊鉗2從865開始, 焊鉗3從1025開始.
鉚鉗1 從1185開始, 鉚鉗2 從1265 開始. 壓鉚鉗1從 1345開始
壓鉚鉗2 從1425開始.
編輯:黃飛
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28643瀏覽量
208424 -
IO接口
+關注
關注
0文章
31瀏覽量
13475
原文標題:VASS05機器人2.20系統(tǒng)ProConOS_IO接口解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內(nèi)容,主要分為四個部分:機器人計算系統(tǒng),自主機器人的感知系統(tǒng),自主
發(fā)表于 01-04 19:22
什么是工業(yè)機器人
機械手之間有防護墻隔開,操作者可通過觀察窗或閉路電視對從機械手操作機進行有效的監(jiān)視,主從機械手系統(tǒng)的出現(xiàn)為機器人的產(chǎn)生為近代機器人的設計與制造作了鋪墊。1954年美國戴沃爾最早提出了工業(yè)機器人
發(fā)表于 01-19 10:58
如何系統(tǒng)性地學習工業(yè)機器人技術?
`如何系統(tǒng)性地學習工業(yè)機器人技術?對于一個還沒入門的想學機器人的小白而言,想快速見到成效的的話,找一所對自己胃口的機器人培訓機構是很關鍵的,當然自己本身的決心和毅力離也很重要。工業(yè)
發(fā)表于 03-06 12:56
機器人系統(tǒng)是什么?
機器人的移動通常是從管理機器人總體任務進度的中央處理器發(fā)出位置變化請求時開始的。導航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及
發(fā)表于 09-10 10:44
服務機器人的視覺系統(tǒng)怎么設計?
隨著計算機科學和自動控制技術的發(fā)展,越來越多的不同種類的智能機器人出現(xiàn)在工廠、生活當中,機器人視覺系統(tǒng)作為智能機器人系統(tǒng)中一個重要的子
發(fā)表于 04-07 07:27
焊接機器人的結構與原理
、焊接參數(shù)等,并自動生成一個連續(xù)執(zhí)行全部操作的程序。完成示教后,只需給機器人一個起動命令,機器人將精確地按示教動作,一步步完成全部操作,實際示教與再現(xiàn)。焊接機器人結構:1、
發(fā)表于 11-16 16:18
機器人系統(tǒng)與控制需求簡介
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2
發(fā)表于 09-08 07:44
機器人的控制系統(tǒng)
1、機器人的控制系統(tǒng)“控制”的目的是使被控對象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質(zhì)”是對驅(qū)動器輸出力矩的控制。2、機器人示教原理機器人的基本
發(fā)表于 09-13 08:40
通過多軸工業(yè)機器人來聊聊機器人控制系統(tǒng)以及控制器的實現(xiàn)
控制器(運動控制)、伺服驅(qū)動器、IO模塊和電源系統(tǒng)4個部分。 機器人控制系統(tǒng) 機器人控制器是機器人
發(fā)表于 02-24 17:05
什么是審計機器人
RPA機器人執(zhí)行由各種步驟組成的任務。他們可以驗證系統(tǒng)數(shù)據(jù),通過邏輯檢查確定結論,生成文檔和信息請求,并將接收到的數(shù)據(jù)輸入系統(tǒng)。
發(fā)表于 08-09 09:10
?7714次閱讀
ProConOS是一款高性能PLC運行時間引擎
KUKA.PLC ProConOS是一個運行時間系統(tǒng),工藝程序包 KUKA.PLC Multiprog使用該系統(tǒng)執(zhí)行機器人控制系統(tǒng)上的 虛擬
VASS05機器人2.20系統(tǒng)ProConOS_IO接口解析
ProConOS和機器人控制器之間的布爾值交換
$SOFTPLCBOOL[] ProConOS和機器人控制器之間的布爾值交換 借助Mulitprog庫KrcExVarLib的功能塊,可以從數(shù)組變量中讀取單個或多個值,也可以將其寫入數(shù)組變量






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論