") αSTEP AZ系列步進(jìn)電機(jī)優(yōu)勢(shì):消除外部傳感器
αSTEP AZ系列步進(jìn)電機(jī)優(yōu)勢(shì):消除外部傳感器
αSTEP AZ 系列步進(jìn)電機(jī)優(yōu)勢(shì):消除外部傳感器
如今,傳感技術(shù)無(wú)處不在。傳感器用于檢測(cè)智能手機(jī)上的人體觸摸、房間內(nèi)的環(huán)境溫度,甚至用于糖尿病檢測(cè)的非侵入式血糖測(cè)量。在本文中,我們將重點(diǎn)介紹專門用于歸位和限制電機(jī)操作的最常用的外部傳感器。
出于多種原因,使用已經(jīng)集成到機(jī)器組件(如電機(jī))中的內(nèi)置傳感器可能更有意義。我們的新型 AlphaStep AZ 系列電機(jī)提供獲得專利的內(nèi)置位置跟蹤傳感器,可以消除本文中討論的大多數(shù)外部傳感器,并為機(jī)器設(shè)計(jì)人員提供更好性能的替代方案。
讓我們首先了解這些傳感器的基本特性及其必要的設(shè)計(jì)注意事項(xiàng),以便更好地了解內(nèi)置傳感器的優(yōu)勢(shì)。
什么是傳感器?
在最一般的術(shù)語(yǔ)中,傳感器是將物理參數(shù)(溫度、濕度、速度、距離等)轉(zhuǎn)換為電信號(hào)的設(shè)備,控制系統(tǒng)可以將其用于驗(yàn)證目的。在工業(yè)自動(dòng)化中,機(jī)械開(kāi)關(guān)和存在傳感器是用于確定特定位置是否存在物理移動(dòng)負(fù)載的傳感器類型。如果機(jī)器過(guò)程變得不穩(wěn)定,則電機(jī)有必要移回其“原始”位置以重新開(kāi)始運(yùn)行。
歸位操作的重要性
在需要高位置精度的 CNC 路由器或 3D 打印機(jī)中,“原”或“零”位置對(duì)于伺服或步進(jìn)電機(jī)開(kāi)始計(jì)算其“步數(shù)”的位置至關(guān)重要。即使對(duì)于帶有增量編碼器的電機(jī),也需要外部機(jī)械開(kāi)關(guān)或存在傳感器來(lái)可靠地物理確定起始位置。如果沒(méi)有起始位置,電機(jī)可以從任何旋轉(zhuǎn)角度啟動(dòng),任何后續(xù)運(yùn)動(dòng)都會(huì)不準(zhǔn)確。為了確保安全或避免損壞,需要更多的傳感器來(lái)確定上限和下限,以限制電機(jī)運(yùn)動(dòng)。如果觸發(fā)任何“限位”傳感器,機(jī)器將發(fā)出警報(bào),并且需要進(jìn)行“歸位”操作以將電機(jī)重置回其起始位置。
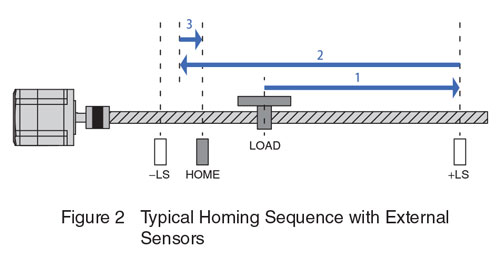
圖 2 顯示了電機(jī)與滾珠/絲杠耦合以進(jìn)行線性運(yùn)動(dòng)的典型歸位序列。有 3 個(gè)傳感器:-LS、HOME 和 +LS。首先,請(qǐng)注意電機(jī)并不完全位于 HOME 傳感器上。此時(shí),命令電機(jī)開(kāi)始正常運(yùn)行,正向 +LS 傳感器。由于電機(jī)不在它應(yīng)該啟動(dòng)的位置,它最終會(huì)將負(fù)載移動(dòng)到預(yù)期的操作范圍之外并觸發(fā) +LS 限位傳感器。發(fā)生這種情況時(shí),電機(jī)將需要反轉(zhuǎn)方向并將負(fù)載移向 HOME 傳感器以自行復(fù)位。一旦它觸發(fā)并通過(guò) HOME 傳感器,電機(jī)將反轉(zhuǎn)其方向回到 HOME 傳感器,直到它再次被觸發(fā)。此時(shí),電機(jī)停止,歸位序列完成。
機(jī)械開(kāi)關(guān)和存在傳感器
機(jī)械開(kāi)關(guān),也稱為限位開(kāi)關(guān),工作方式類似于電燈開(kāi)關(guān),常用于工業(yè)自動(dòng)化。
機(jī)械開(kāi)關(guān)是簡(jiǎn)單的機(jī)電設(shè)備,其中執(zhí)行器機(jī)械連接到一組電觸點(diǎn)。
當(dāng)物體或負(fù)載與機(jī)械開(kāi)關(guān)上的執(zhí)行器接觸時(shí),觸點(diǎn)閉合(或打開(kāi))以建立(或斷開(kāi))可用作驗(yàn)證信號(hào)的電氣連接。由于機(jī)械開(kāi)關(guān)具有最多的運(yùn)動(dòng)部件,因此需要額外的設(shè)計(jì)考慮以便將來(lái)進(jìn)行維護(hù)。限位開(kāi)關(guān)與其他類型的存在傳感器之間的主要區(qū)別在于,限位開(kāi)關(guān)需要移動(dòng)負(fù)載的物理接觸。它們還需要最多的安裝空間。
接近傳感器是一種存在傳感器。根據(jù)所使用的接近傳感器的類型,移動(dòng)負(fù)載上可能需要一個(gè)“標(biāo)志”才能工作。“標(biāo)志”是負(fù)載上可以很容易被傳感器檢測(cè)到的部分。
接近傳感器通常會(huì)發(fā)射電磁場(chǎng)并尋找電磁場(chǎng)的變化。一旦檢測(cè)到磁場(chǎng)發(fā)生變化,它就可以向運(yùn)動(dòng)控制器或 PLC 輸出電信號(hào)。接近傳感器包括兩種類型:電感式和電容式。電感式接近傳感器可以檢測(cè)黑色金屬物體。這通常是使用“標(biāo)志”的地方。電容式接近傳感器可以檢測(cè)非金屬物體,但技術(shù)成本更高。接近傳感器相當(dāng)容易安裝和操作,并且可以在惡劣的環(huán)境中運(yùn)行。它們的檢測(cè)范圍通常為 1~10 mm。對(duì)于更長(zhǎng)的范圍,需要更大的傳感器。重復(fù)精度在 0.1~0.5 mm 時(shí)不太好,溫度會(huì)影響傳感精度。
光電傳感器是另一種類型的存在傳感器,它發(fā)出可見(jiàn)光或紅外光,并在接收器上尋找偏轉(zhuǎn)信號(hào)。一旦接收器檢測(cè)到從負(fù)載上的標(biāo)志偏轉(zhuǎn)的足夠光信號(hào),它就可以向運(yùn)動(dòng)控制器或 PLC 發(fā)送電信號(hào)。
光電傳感器是高精度定位和良好可重復(fù)性的理想選擇,因?yàn)樗鼈冊(cè)?1 毫米以下提供出色的傳感精度。由于這些傳感器使用光學(xué)器件,因此它們比其他類型的傳感器更適合遠(yuǎn)距離傳感,但它們對(duì)惡劣環(huán)境很敏感。例如,灰塵會(huì)降低這些傳感器中使用的光學(xué)系統(tǒng)。對(duì)齊也可能是一個(gè)需要進(jìn)一步考慮的問(wèn)題。
激光型光電傳感器提供最佳特性,例如遠(yuǎn)距離傳感和精度,但成本增加。與其他傳感器相比,激光可提供亞微米級(jí)(小于 0.001 毫米)的精度、高可重復(fù)性和更長(zhǎng)的檢測(cè)范圍。一些激光傳感器允許對(duì)精確的檢測(cè)范圍進(jìn)行編程。由于我們正在處理激光,因此需要考慮預(yù)防措施以防止與人眼直接接觸。對(duì)于激光傳感器,對(duì)準(zhǔn)需要非常精確。
傳感器選擇的設(shè)計(jì)標(biāo)準(zhǔn)
傳統(tǒng)上,在設(shè)計(jì)控制系統(tǒng)之前,首先根據(jù)應(yīng)用確定電機(jī)的尺寸。最近市場(chǎng)對(duì) IIOT(工業(yè)物聯(lián)網(wǎng))通信的需求正在扭轉(zhuǎn)這一過(guò)程。現(xiàn)在通常首先選擇 PLC(可編程邏輯控制器)或某種形式的 HMI(人機(jī)界面),然后通過(guò)離散 I/O 將電動(dòng)機(jī)、驅(qū)動(dòng)器、運(yùn)動(dòng)控制器和/或傳感器等組件集成到 PLC 或 HMI或現(xiàn)場(chǎng)總線網(wǎng)絡(luò)。在設(shè)計(jì)過(guò)程的早期而不是之后考慮所有機(jī)器組件非常重要。
要確定您的應(yīng)用需要哪種類型的傳感器,您首先需要考慮的一些標(biāo)準(zhǔn)是精度、環(huán)境限制、測(cè)量范圍、校準(zhǔn)、分辨率、成本和可重復(fù)性。由于最終需要更換傳感器,因此您需要確定易于維修的傳感器位置以及必要的電纜長(zhǎng)度。有時(shí),可能需要接線端子來(lái)擴(kuò)展傳感器信號(hào)。由于每個(gè)傳感器都需要電源和輸出接線,用于工業(yè)機(jī)器的 10 個(gè)傳感器使用 40 根電線,因此需要進(jìn)一步投入工時(shí)來(lái)組裝連接器和電纜。
需要集成傳感器
確認(rèn)應(yīng)用所需的傳感器類型后,需要與 PLC 兼容。這些傳感器需要滿足機(jī)器設(shè)計(jì)中選擇的運(yùn)動(dòng)控制器或 PLC 的輸入電路規(guī)格。其中一些規(guī)范是開(kāi)/關(guān)狀態(tài)、電壓水平、電流要求甚至是網(wǎng)絡(luò)協(xié)議。一個(gè)常見(jiàn)的查詢通常涉及確定兼容的傳感器類型以及如何連接傳感器。例如,如果您的 PLC 只接受 NPN 輸出型傳感器,則您不能使用 PNP 輸出型傳感器。您還需要考慮您使用的是常開(kāi)電路還是常閉電路。
外部傳感器的成本
在構(gòu)建傳感器電路之前,您需要先提出物料清單。這些不僅包括正確類型和數(shù)量的傳感器,而且您還需要確定必要的電纜長(zhǎng)度、電纜支架安裝支架和連接器。您可能還必須自己構(gòu)建其中的一些。同時(shí),您的機(jī)器設(shè)計(jì)需要考慮所有必需組件的兼容性和空間。
限位開(kāi)關(guān)是最便宜的傳感設(shè)備。它們的價(jià)格范圍很廣,從不到 1 美元起。然而,他們也是最失敗的。
接近傳感器的成本在 3 到 30 美元之間。它們相當(dāng)容易安裝和使用,并且可以承受惡劣的環(huán)境。但是,您需要經(jīng)常在移動(dòng)負(fù)載上使用金屬“旗幟”,溫度或外部磁場(chǎng)會(huì)影響傳感精度。
光電傳感器更貴,在 40 到 150 美元之間(激光類型更貴)并且可能需要額外的放大器,這會(huì)增加總成本。他們對(duì)自己的環(huán)境和陣營(yíng)很敏感。然而,它們提供最高的精度、最佳的可重復(fù)性和最長(zhǎng)的感應(yīng)范圍。
對(duì)我們自己的工廠生產(chǎn)機(jī)器之一進(jìn)行的一項(xiàng)研究表明,對(duì)于 XYZ 運(yùn)動(dòng)的 3 個(gè)軸,需要 9 個(gè)傳感器(每個(gè) 10 美元)、9 根電纜(每個(gè) 10 美元)、3 個(gè)狗(每個(gè) 1 美元)和 3 個(gè)傳感器導(dǎo)軌(每個(gè) 5 美元)總費(fèi)用為 198 美元。該機(jī)器還包括其他組件,例如攝像頭和氣源,這些組件也需要電纜,因此電纜位置的設(shè)計(jì)也很重要。
測(cè)試
下一步是實(shí)際測(cè)試傳感器以確認(rèn)它們是否按預(yù)期工作。您需要驗(yàn)證傳感器是否安裝在正確的位置,以確定正確的位置。這通常需要對(duì)電機(jī)的歸位操作進(jìn)行重復(fù)測(cè)試。這是耗時(shí)的,因?yàn)闅w位操作需要以比正常操作慢的速度執(zhí)行。
在確認(rèn)您的傳感器系統(tǒng)按預(yù)期工作后,您還需要制定維護(hù)計(jì)劃以防止現(xiàn)場(chǎng)故障。
維護(hù)
與任何電氣或機(jī)械組件一樣,這些傳感器需要根據(jù)環(huán)境和使用情況不時(shí)更換。如果一個(gè)傳感器出現(xiàn)故障,就會(huì)使整個(gè)機(jī)器過(guò)程變得不可靠。機(jī)器需要關(guān)閉,這意味著您公司的產(chǎn)量和利潤(rùn)會(huì)減少。您還需要擁有技能和經(jīng)驗(yàn)的維護(hù)工程師來(lái)幫助防止這些故障或在它們意外發(fā)生時(shí)解決這些問(wèn)題。
維護(hù)計(jì)劃因所選傳感器的類型而異。一些傳感器比其他傳感器對(duì)其環(huán)境更敏感。灰塵和油污等因素會(huì)縮短光電傳感器的使用壽命。需要定期檢查傳感器的對(duì)齊情況,特別是如果它是激光傳感器。電機(jī)機(jī)構(gòu)發(fā)出的顫動(dòng)可能會(huì)導(dǎo)致傳感器隨時(shí)間推移發(fā)生偏移。
當(dāng)我們討論維護(hù)主題時(shí),了解實(shí)時(shí)監(jiān)控功能是我們 AZ 系列驅(qū)動(dòng)器的標(biāo)準(zhǔn)配置很有用。可以通過(guò)離散 I/O 或現(xiàn)場(chǎng)總線網(wǎng)絡(luò)訪問(wèn)實(shí)時(shí)存儲(chǔ)的驅(qū)動(dòng)器數(shù)據(jù),例如警報(bào)歷史記錄、輸入電壓、電機(jī)位置、速度、溫度和扭矩。了解電機(jī)和驅(qū)動(dòng)器的狀態(tài)有助于規(guī)劃維護(hù)計(jì)劃或進(jìn)行故障排除。
AZ系列優(yōu)勢(shì)
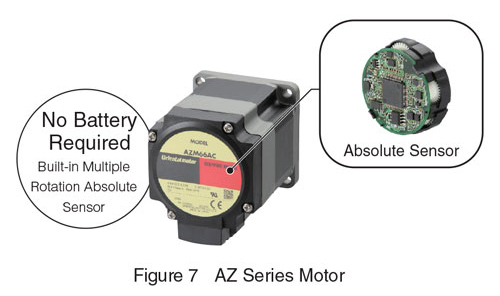
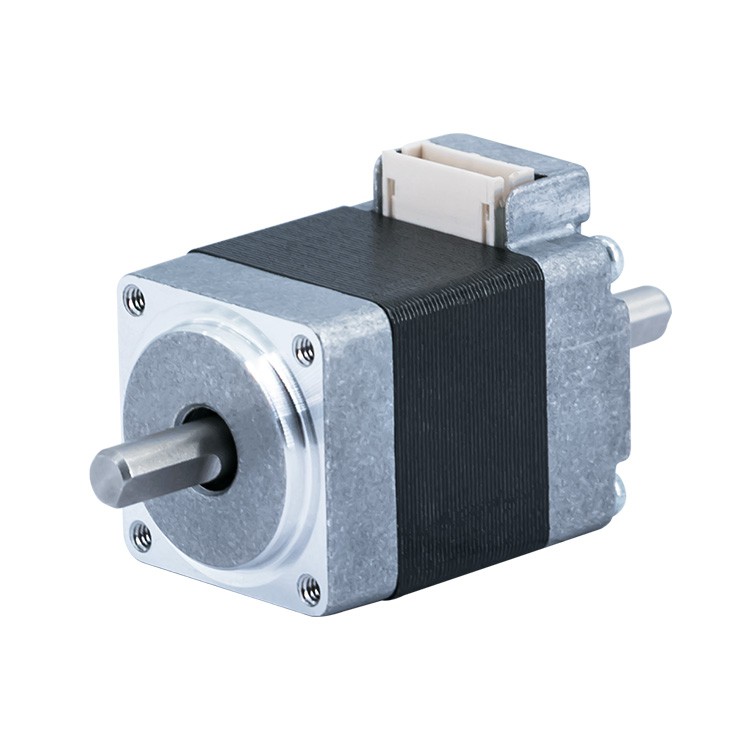
正如文章開(kāi)頭提到的,有時(shí)使用帶有內(nèi)置位置跟蹤傳感器(例如編碼器)的電機(jī)可能更有意義。我們的 AZ 系列閉環(huán)步進(jìn)電機(jī)在電機(jī)背面配備內(nèi)置絕對(duì)式機(jī)械傳感器,可提供與絕對(duì)式編碼器相同的功能,并且無(wú)需外部傳感器。
這種多旋轉(zhuǎn)位置傳感器集成到 AZ 電機(jī)的背面,并與其專用驅(qū)動(dòng)器一起跟蹤電機(jī)的絕對(duì)位置并提供快速、可靠的歸位。
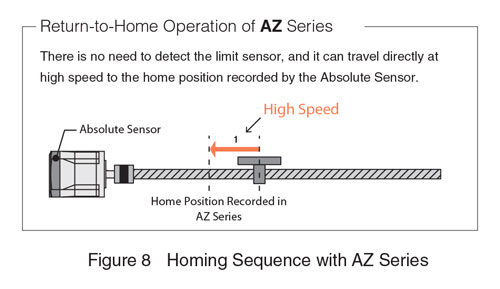
隨著生產(chǎn)效率要求變得越來(lái)越苛刻,跟蹤電機(jī)絕對(duì)位置的能力在工業(yè)自動(dòng)化中變得越來(lái)越重要。如果您的機(jī)器中沒(méi)有絕對(duì)位置傳感器,則意味著電機(jī)可能會(huì)失去其已知位置,并且電機(jī)運(yùn)行需要重新從頭開(kāi)始。在此期間,您的機(jī)器不生產(chǎn),甚至可能生產(chǎn)出有缺陷的產(chǎn)品。AZ系列無(wú)需檢測(cè)外部原點(diǎn)傳感器,可直接高速移動(dòng)至絕對(duì)式機(jī)械傳感器記錄的原點(diǎn)位置。
AZ 傳感器如何工作?

這種新型絕對(duì)式機(jī)械傳感器的技術(shù)基于稱為 ABZO 傳感器的磁阻傳感技術(shù)(如圖 9 所示)。這些傳感器可以通過(guò)電阻檢測(cè)磁場(chǎng)的角度。
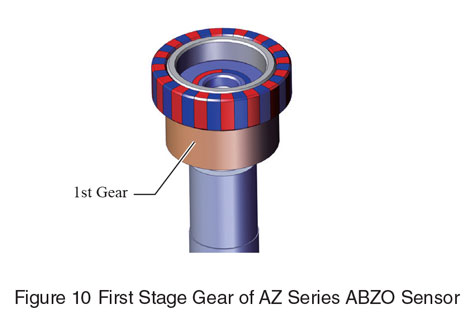
內(nèi)置絕對(duì)式機(jī)械傳感器的結(jié)構(gòu)包括一個(gè)連接到轉(zhuǎn)子(電機(jī)的旋轉(zhuǎn)部件)的主要一級(jí)齒輪,然后一系列齒輪也連接到一級(jí)齒輪。
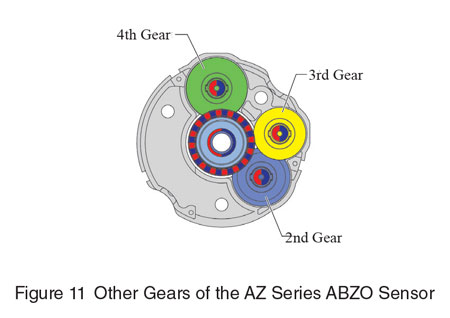
所有齒輪都在特定位置安裝了磁鐵。由于這些齒輪的齒數(shù)不同,安裝在這些齒輪上的磁鐵會(huì)指向不同的方向。安裝在電路板上(也安裝在電機(jī)背面)的磁阻傳感器可以確定這些齒輪上磁極產(chǎn)生的磁場(chǎng)的角度,然后通過(guò)類似的算法計(jì)算轉(zhuǎn)子的絕對(duì)位置掛鐘的時(shí)針、分針和秒針的概念。可以準(zhǔn)確可靠地跟蹤高達(dá)1800 轉(zhuǎn)的絕對(duì)位置電機(jī)。
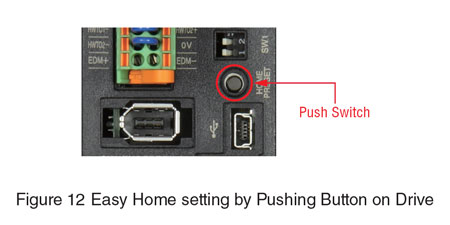
由于可以通過(guò)按鈕或軟件點(diǎn)擊輕松設(shè)置絕對(duì)起始位置并將其存儲(chǔ)在非易失性存儲(chǔ)器中,因此不需要外部傳感器。
隨著外部傳感器的消除,所有類型傳感器的問(wèn)題(例如接線、測(cè)試和維護(hù))也從您的機(jī)器設(shè)計(jì)中消除;從而減少需要擔(dān)心的問(wèn)題。為了承受苛刻的環(huán)境,AZ 系列電機(jī)還具有IP66等級(jí),既防塵又防水。
一些伺服電機(jī)配備了絕對(duì)編碼器,但其中許多本質(zhì)上是光學(xué)編碼器,需要使用電池供電。由于我們的傳感器本質(zhì)上是機(jī)械的,因此不需要電池供電。停電后,我們的 AZ 系列電機(jī)可以立即恢復(fù)運(yùn)行,無(wú)需執(zhí)行歸位操作。
憑借我們獲得專利的Alpha Step Keep-in-Step技術(shù),AZ 系列具有獨(dú)立的位置校正功能(類似于伺服電機(jī)系統(tǒng))以避免錯(cuò)過(guò)步數(shù)。這確保了定位應(yīng)用的額外位置精度和安心。該技術(shù)還使用電機(jī)的位置傳感器來(lái)優(yōu)化電機(jī)繞組內(nèi)相位切換的時(shí)間,以獲得最佳性能。在下一節(jié)中,我們將展示一些實(shí)際測(cè)試數(shù)據(jù)來(lái)比較停止精度。
歸位停止精度比較
現(xiàn)在讓我們比較使用外部傳感器與使用我們的 AZ 系列步進(jìn)電機(jī)時(shí)的歸位停止精度。
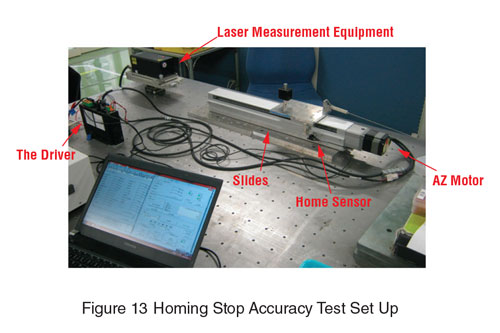
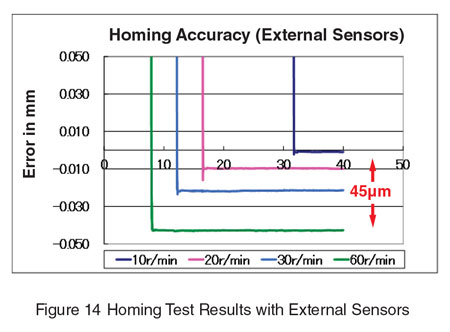
我們的測(cè)試裝置包括安裝在我們的一個(gè)線性滑軌上的 AZ 電機(jī)、AZ 專用驅(qū)動(dòng)器、外部光電傳感器和激光測(cè)距裝置。然后我們進(jìn)行了測(cè)試并記錄了以毫米為單位的誤差與以秒為單位的時(shí)間。不同的顏色顯示用于測(cè)試的不同 RPM。
首先,我們測(cè)試了光電傳感器在不同速度下的歸位操作。請(qǐng)務(wù)必注意圖 14,較高的速度會(huì)導(dǎo)致較低的停止精度。這是因?yàn)樵诟叩乃俣认拢瑐鞲衅魍耆V闺姍C(jī)需要更長(zhǎng)的時(shí)間。在 60 RPM 時(shí),我們發(fā)現(xiàn)過(guò)沖誤差在 0.03 到 0.05 毫米之間。從10 到 60 RPM ,我們有大約45 微米的停止精度變化。
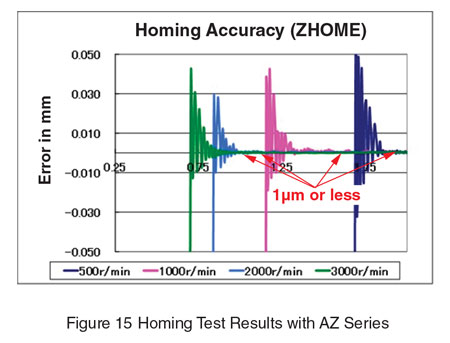
當(dāng)我們?cè)跊](méi)有外部傳感器的情況下使用 AZ 系列執(zhí)行相同的歸位操作時(shí),我們可以在高達(dá) 3000 RPM 的速度下提供 3 弧分的停止精度。這意味著您可以獲得更快、更一致的停止精度,以幫助提高機(jī)器的吞吐量。如圖 15所示,一旦 AZ 電機(jī)穩(wěn)定停止,停止精度為1 微米或更小。
概括
總之,在選擇和維護(hù)外部傳感器時(shí)需要考慮許多因素,例如傳感器的特性、環(huán)境限制和規(guī)范。我們還討論了與外部傳感器相關(guān)的問(wèn)題,例如接線、維護(hù)和停止精度的不一致。機(jī)器制造商需要投入更多時(shí)間或雇用更多員工,以確保每個(gè)組件都得到妥善集成和維護(hù),從而確保機(jī)器的高效生產(chǎn)。
隨著當(dāng)前追求工程效率和加快產(chǎn)品開(kāi)發(fā)的趨勢(shì),帶有內(nèi)置位置傳感器的 AZ 系列步進(jìn)電機(jī)消除了許多與外部傳感器相關(guān)的問(wèn)題,并為工業(yè)機(jī)器應(yīng)用提供了理想的集成產(chǎn)品解決方案。立即與我們的 OEM 銷售團(tuán)隊(duì)安排演示,以了解有關(guān) AZ 系列的更多信息。
-
傳感器
+關(guān)注
關(guān)注
2553文章
51407瀏覽量
756625 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6660瀏覽量
110889 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3120瀏覽量
147848 -
機(jī)械開(kāi)關(guān)
+關(guān)注
關(guān)注
0文章
37瀏覽量
10879
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
步進(jìn)電機(jī)怎么選型?
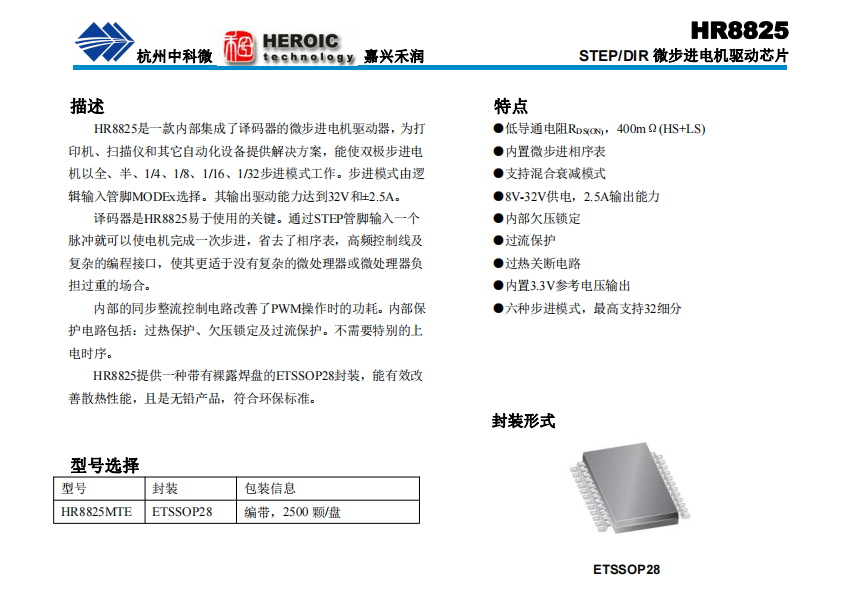
HR8825 STEP/DIR 微步進(jìn)電機(jī)驅(qū)動(dòng)芯片
步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動(dòng)控制?
步進(jìn)電機(jī)是什么?基本參數(shù)有哪些?
Made with KiCad:CAN 總線步進(jìn)電機(jī)閉環(huán)控制板
TI濕度傳感器如何使用片上加熱器消除器件冷凝

步進(jìn)電機(jī)型號(hào)與步進(jìn)電機(jī)命名規(guī)則

步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分的優(yōu)點(diǎn)
步進(jìn)電機(jī)控制器電路圖 步進(jìn)電機(jī)控制器的分類及其特點(diǎn)

什么是步進(jìn)電機(jī)控制器?步進(jìn)電機(jī)控制器電路圖






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論