 選擇和使用RS-232、RS-422和RS-485串行數據標準的指南
選擇和使用RS-232、RS-422和RS-485串行數據標準的指南
三種常見的串行數據標準RS-232、RS-422和RS-485按規格和電氣接口進行描述。介紹了電纜端接技術、多個負載的使用、RS-232 的菊花鏈連接、RS-232 到 RS-485 的轉換、RS-485 到 RS-232 的轉換以及 RS-232 端口供電的 RS-485 轉換。
介紹
“標準的偉大之處在于有這么多可供選擇。這一聲明是在最近的一次光纖會議上發表的,也適用于電接口標準。由于串行數據標準往往在特定行業中單獨發展,因此我們擁有比我們應該更多的標準。
也許PC和電信應用最成功的串行數據標準是RS-232。同樣,RS-485和RS-422是工業應用中最成功的標準之一。這些標準不直接兼容。然而,對于控制和儀表應用,通常需要在標準之間進行通信。本文討論不同的標準(電氣物理層規范),解釋如何從一個標準轉換為另一個標準,并演示如何在同一應用中組合不同的標準。
RS-232 電氣規格和典型連接
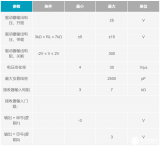
RS-232鏈路最初旨在支持IBM PC上的調制解調器和打印機應用程序,但是,它現在使各種外圍設備能夠與PC通信。RS-232標準被定義為以低波特率(<20kbps)增加串行通信距離的單端標準。多年來,標準不斷變化,以適應更快的驅動器,如MAX3225E,它提供1Mbps的數據速率能力。為了符合RS-232標準,MAX3225E等收發器必須滿足表1所列的電氣規格。典型的連接(圖1)顯示了使用硬件握手來控制數據流。
| 參數 | 條件 | 最小值 | 麥克斯 | 單位 |
| 驅動器輸出電壓,開路 | 25 | V | ||
| 驅動器輸出電壓,負載 | 3kΩ < RL < 7kΩ | ±5 | ±15 | V |
| 驅動器輸出電阻,斷電 | -2V < V < 2V | 300 | ||
| 壓擺率 | 4 | 30 | V/μs | |
| 最大負載電容 | 2500 | pF | ||
| 接收器輸入電阻 | 3 | 7 | 千分 | |
| 接收器輸入閾值: | ||||
| 輸出 = 標記(邏輯 1) | -3 | V | ||
| 輸出 = 空間(邏輯 0) | 3 | V | ||
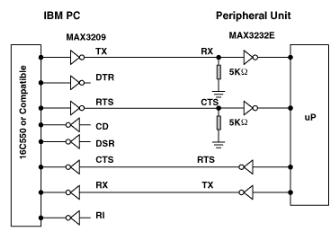
圖1.典型的 RS-232 連接。
典型的RS-232信號(圖2,CH1)擺幅為正和負。請注意左軸上 0V 跡線標記的相對位置。盡管RS-232數據是反轉的,但從TTL/CMOS到RS-232并返回TTL/CMOS的整體轉換可以恢復數據的原始極性。典型的RS-232傳輸很少超過100英尺,原因有兩個。首先,發射電平(±5V)和接收電平(±3V)之間的差異僅允許2V的共模抑制。其次,較長電纜的分布電容會通過超過最大額定負載(2500pF)來降低壓擺率。由于RS-232設計為點對點接口而非多點接口,因此其驅動器的額定值為3kΩ至7kΩ的單負載。因此,菊花鏈方案通常用于多點接口應用(圖 3)。
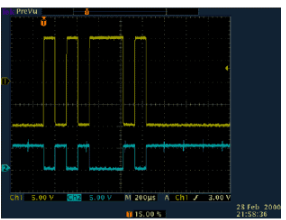
圖2.RS-232接收器接受雙極性輸入信號(頂部跡線,CH1)并輸出反相TTL/CMOS信號(底部跡線,CH2)。
圖3.菊花鏈允許在一條RS-232線路上安裝多個從屬收發器。
菊花鏈器件及其局限性
在菊花鏈配置中,RS-232信號通過一個接收器進入并環通到發射器。對于數據傳輸線上的后續設備重復此配置。電纜斷裂是這種技術的一個主要問題。從機1和從機2之間的中斷會阻止所有下游設備發送或接收數據。其他多點RS-232技術包括預緩沖或升壓RS-232輸出驅動(使其能夠并聯驅動多個5kΩ輸入)。
為了消除菊花鏈網絡的相關問題,Maxim開發了MAX3322E/MAX3323E,專門設計用于多點應用。這些獨特的器件采用 5k 的邏輯開關輸入電阻。未選擇器件時,其輸入電阻保持高阻抗狀態,允許沿共享總線與其他器件進行通信。
菊花鏈網絡問題的另一種解決方案是將RS-232 Rx和Tx信號轉換為RS-422信號(見表2)。RS-422是一種差分標準,允許在更遠的距離上進行傳輸。RS-422 輸入具有更高的輸入電阻,加上更高的驅動能力,允許連接多達 4 個節點(圖 422)。RS-3162的另一個優點是發射和接收路徑分開,不需要方向控制。設備之間的任何必要的握手都可以使用軟件(XON/OFF握手)或硬件(一組單獨的雙絞線)執行。MAX232提供了一種經濟的RS-422和RS-232信號轉換方式。
| 參數 | 條件 | 最小值 | MAX | 單位 |
| 驅動器輸出電壓,開路 | ±10 | V | ||
| 驅動器輸出電壓,負載 | RL= 100Ω | 2 | ±10 | V |
| -2 | ||||
| 驅動器輸出電阻 | A 到 B | 100 | Ω | |
| 驅動器輸出短路電流 | 每個輸出到公共 | 150 | 馬 | |
| 驅動器輸出上升時間 | RL= 100Ω | 10 | 位寬的百分比 | |
| 驅動器共模電壓 | RL= 100Ω | ±3 | V | |
| 接收器靈敏度 | V厘米 <±7V | ±200 | 毫伏 | |
| 接收器共模電壓范圍 | -7 | 7 | V | |
| 接收器輸入電阻 | 4 | 千分 | ||
| 差分接收器電壓 | 操作 | ±10 | V | |
| 承受 | ±12 | V |
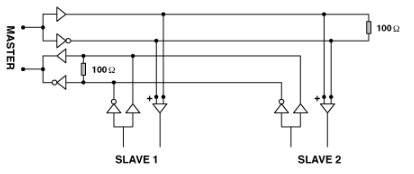
圖4.典型的RS-422系統允許差分傳輸線路上多達<>個從機收發器。
RS-485和RS-422之間的差異及其在應用中的使用
RS-422和RS-485收發器經常相互混淆;一個假定是另一個的全雙工版本。然而,其共模范圍和接收器輸入電阻的電氣差異使這些標準適用于不同的應用。由于RS-485符合所有RS-422規范(表3),因此RS-485驅動器可用于RS-422應用。然而,事實并非如此。RS-485驅動器的共模輸出范圍為-7V至+12V,而RS-422驅動器的共模范圍僅為±3V。RS-4驅動器的最小接收器輸入電阻為422kΩ,RS-12驅動器的最小接收器輸入電阻為485kΩ。
| 參數 | 條件 | 最小值 | MAX | 單位 |
| 驅動器輸出電壓,開路 | 1.5 | 6 | V | |
| -1.5 | -6 | V | ||
| 驅動器輸出電壓,負載 | RL= 100Ω | 1.5 | 5 | V |
| -1.5 | -5 | V | ||
| 驅動器輸出短路電流 | 每個輸出到公共 | ±250 | 馬 | |
| 驅動器輸出上升時間 | RL= 54Ω | 30 | 位寬的百分比 | |
| CL= 50pF | ||||
| 驅動器共模電壓 | RL= 54Ω | ±3 | V | |
| 接收器靈敏度 | -7V < V厘米< 12V | ±200 | 毫伏 | |
| 接收器共模電壓范圍 | -7 | 12 | V | |
| 接收器輸入電阻 | 12 | 千分 |
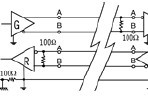
為了降低布線費用并實現更長的線路長度,RS-485收發器已成為銷售點、工業和電信應用中的流行標準。RS-485 更寬的共模范圍還支持更長的線路長度和更高的每個節點輸入電阻,從而允許將更多節點連接到總線(圖 5)。
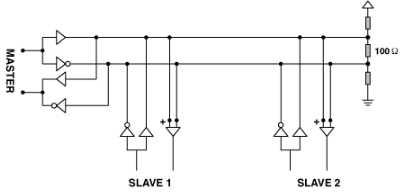
圖5.與RS-422相比,RS-485連接具有更高的輸入阻抗和更寬的共模范圍,可實現更長的線路長度。
差分RS-485傳輸(圖6)沿雙絞線電纜的每一段(導線)產生相反的電流和磁場,從而通過交叉消除每根導線周圍的相反場來最大限度地減少發射的電磁干擾(EMI)。對于通過長電纜或高數據速率傳輸,電纜顯示為傳輸線,應以電纜的特性阻抗端接。RS-485連接的這一方面會引起混淆。線路是否需要端接,如果需要,應如何端接?如果設計人員不是最終用戶,這些問題是否應該留給安裝程序來解決?對于大多數RS-485收發器,數據手冊指出了當電纜充當傳輸線時,可以在無端接和簡單的點對點端接之間進行簡單的選擇(圖7)。A-B 端子上的端接電阻是無害的。默認情況下,傳輸線應端接在線路上的最后一個收發器(總線)。
圖6.RS-485線路上的相反極性信號通過交叉抵消彼此各自的磁場來最小化EMI。上述示波器照片上的GND參考已被移動(偏移),以清楚地顯示RS-485輸出信號的反極性。
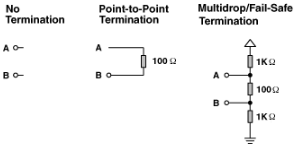
圖7.傳輸線端接電阻器的選擇取決于應用。
故障安全
決定是否需要終端電阻只是實現RS-485系統的一部分問題。通常,如果A>B+485mV或更高,則RS-1接收器輸出為“200”,如果B>A為0mV或更高,則為“200”。在半雙工RS-485網絡中,主收發器在向從機發送消息后對總線進行三態處理。然后,在沒有信號驅動總線的情況下,接收器的輸出狀態不確定,因為A和B之間的差值趨于0V。如果接收器輸出RO為“0”,則從機將其解釋為新的起始位,并嘗試讀取以下字節。結果是成幀錯誤,因為停止位從未發生。公共汽車無人認領,網絡停滯不前。
遺憾的是,對于0V差分輸入,不同的芯片運行可以在RO上產生不同的輸出信號。原型可以完美地工作,但是,某些節點將在以后的生產運行中失敗。要解決此問題,請偏置總線,如圖7所示,在多點/故障安全端接下。對總線進行偏置可確保當總線處于三態時,接收器輸出保持“1”。或者,也可以使用“真正的故障安全”接收器,如MAX3080 (5V)和MAX3070 (3V)系列。這些器件通過將接收器的閾值更改為-1mV來確保RO輸出為“0”,以響應50V差分輸入。
RS-232/RS-485 協議轉換器
MAX3162是一種獨特的器件,它包含RS-232和RS-485接收器和發送器。單個IC中包含的各種通信設備使個人能夠在RS-232和RS-485信號之間進行雙向轉換。圖8所示電路給出了MAX3162,配置為在點對點應用中雙向轉換RS-232和RS-485信號。
圖8.MAX3162在點對點應用中在RS-232和RS-485信號之間進行雙向轉換。
圖9所示為MAX3162配置為RS-232/RS-485多點協議轉換器。平移方向通過RTS信號R1IN控制。單端RS-232接收器輸入信號轉換為差分RS-485發射器輸出。類似地,差分RS-485接收器輸入信號被轉換為單端RS-232發射器輸出。在R232IN上接收的RS-2數據在Z和Y上作為RS-485信號傳輸,在A和B上接收的RS-485信號在T232OUT上作為RS-1信號傳輸。
RTS線路是在從RS-232轉換為RS-485的電路中控制總線方向的常用方法。RS-232 端口上的這條線控制 RS-485 收發器是充當發射器還是接收器(圖 9)。請注意,除非系統監視RS-485驅動程序輸入DI,否則系統無法確定UART發送緩沖區中的數據字節是否已傳輸。也就是說,在使用DE輸入改變總線方向之前,系統必須允許固定的時間延遲或主動監控DI輸入。
其他方向控制技術包括使用微控制器并用數據驅動DE輸入,同時將A-B線拉開(將上拉電阻從A連接到5V,并將下拉電阻從B連接到地)。這些電阻的值隨電纜電容而變化,但典型值為1kΩ。
圖9.MAX3162在多點應用中可在RS-232和RS-485信號之間進行雙向轉換。
端口供電設備
從RS-232到RS-485的許多轉換器都是“端口供電轉換器”,其中 RS-485 電源來自 RS-232 RTS 線路(有時是 RTS 和 CTS (DTR) 線路的組合)。由于RS-232端口的可用功率有限,因此當使用端口供電的轉換器(例如485個RS-485端接)時,無法實現RS-200啟動電壓。然而,低接收器門限(<>mV)允許相當的誤差余量。這種技術在短線路長度且 A-B 端子上沒有端接電阻的系統中是可以接受的。
熱插拔
當電路板插入熱背板或通電背板時,數據總線的差分干擾可能導致數據錯誤。在初始電路板插入時,數據通信處理器會經歷自己的上電順序。在此期間,處理器的邏輯輸出驅動器為高阻抗,無法將MAX3060E/MAX3080E的DE和/RE輸入驅動至定義的邏輯電平。處理器邏輯驅動器的高阻抗狀態漏電流高達±10mA,可能導致標準CMOS使能收發器的輸入漂移到不正確的邏輯電平。此外,寄生電路板電容可能導致VCC或GND耦合到使能輸入。如果沒有熱插拔功能,這些因素可能會使能收發器的驅動器或接收器。
審核編輯:郭婷
-
驅動器
+關注
關注
53文章
8271瀏覽量
147053 -
接口
+關注
關注
33文章
8691瀏覽量
151909 -
調制解調器
+關注
關注
3文章
860瀏覽量
38936
發布評論請先 登錄
相關推薦
RS-232/RS-485/RS-422轉換器解決方案
RS-232轉RS-485/RS-422智能轉換器電路圖
選拔使用RS-232接口,遙感-422,和RS-485串行數
單芯片RS-232/RS-485/RS-422串行收發器SP
RS232、RS422與RS485標準及應用
三種常見的串行數據標準:RS-232、RS-422和RS-485
【理論】RS-232、RS-485、RS-422通信接口標準介紹

一文讀懂RS-232、RS-422及RS-485串行數據標準的選擇及使用





 工商網監
工商網監
評論