") 能量采集電路的工作原理
能量采集電路的工作原理
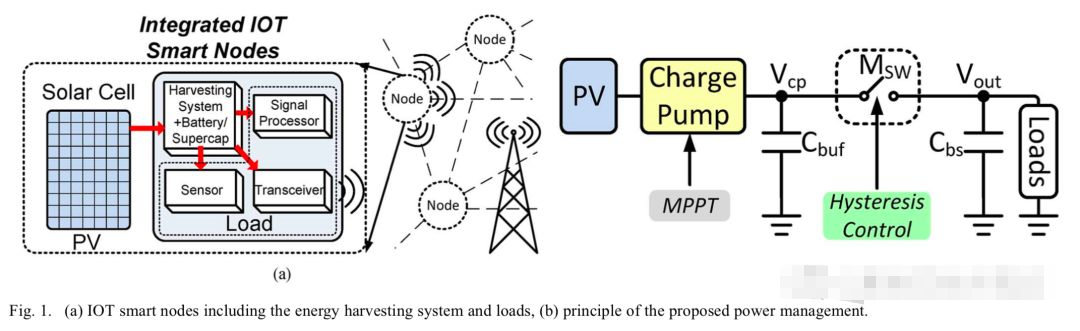
Fig.1(a)是智慧物聯(lián)網(wǎng)節(jié)點框架原理圖,節(jié)點主要包括能量采集系統(tǒng)、信號處理器、傳感器、收發(fā)機模塊,其中能量采集系統(tǒng)用于把環(huán)境中多種可用能量源,如太陽能、熱能、射頻信號能量、微生物分解化學(xué)能、振動能量通過fig1(b)模塊的電源管理模塊進行收集存儲、對智慧傳感器節(jié)點進行供電,使其可以正常的工作。隨著物聯(lián)網(wǎng)時代的到來,未來將會有數(shù)以億計的傳感器節(jié)點分布在我們的生活中用于環(huán)境監(jiān)測、健康、工業(yè)、交通、智能家居、智慧城市等各個領(lǐng)域為我們提供更加安全、舒適、便捷、高效的生活環(huán)境。傳統(tǒng)的傳感器節(jié)點主要存在三大缺點:一需要電池供電,即使采用低功耗技術(shù)用于延長節(jié)點的壽命,但也會存在長期工作帶來電池?fù)p耗,導(dǎo)致節(jié)點工作壽命的縮短,無法長期重復(fù)利用,帶來較大的傳感器節(jié)點部署成本;二過大的電池將會使節(jié)點增加了節(jié)點的尺寸不便于可穿戴領(lǐng)域的監(jiān)測和使用。三傳統(tǒng)的能量采集電路采用帶有off-Ship 電感的Boost電路用于升壓,提供給節(jié)點不同的電壓,即使采用片上可集成電感技術(shù)來實現(xiàn)節(jié)點的集成來說,過大的電感將會增加芯片的面積和制造成本。目前,采用片上電容DC-DC電源轉(zhuǎn)換管理技術(shù)使得能量采集技術(shù),使得電源管理芯片具有可集成、低功耗、尺寸小等優(yōu)點,已經(jīng)成為未來物聯(lián)網(wǎng)節(jié)點的能量之源。
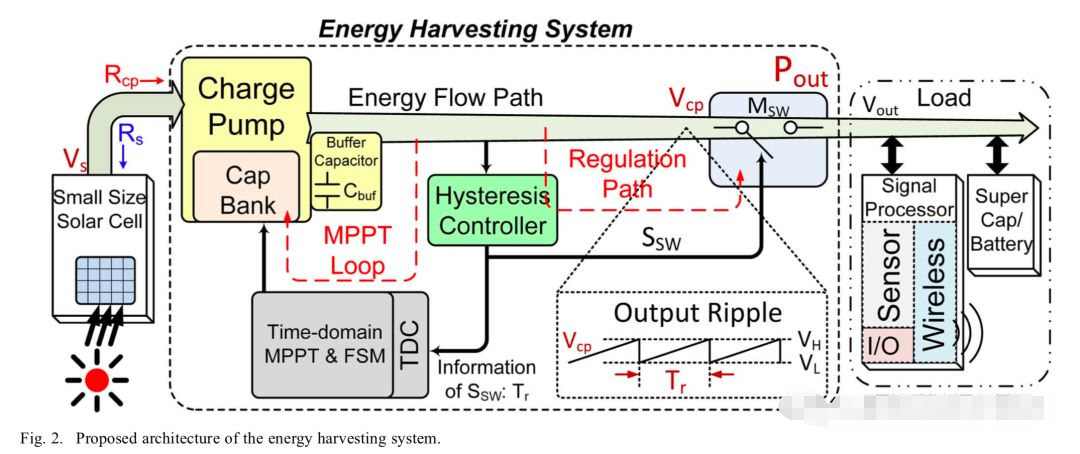
文中提出的能量采集系統(tǒng)架構(gòu)原理圖如Fig.2所示。圖中通過solar cell采集太陽能作為系統(tǒng)能量輸入,對于太陽能單元模塊的建模可以看出其內(nèi)阻RS隨著光照強度變化不斷變化,為了獲得最大能量采集,基本原理還是將能量采集系統(tǒng)的等效輸入電阻Rcp可以實現(xiàn)與RS匹配來得到最大輸出功率采集。能量采集系統(tǒng)主要包括電流饑餓型振蕩器、輔助振蕩器、x3可變泵電容的電荷泵、滯后調(diào)節(jié)器、時域MPPT的有限狀態(tài)機(包括時間轉(zhuǎn)數(shù)字轉(zhuǎn)換器)、用于存儲暫時能量采集的緩沖電容。整個系統(tǒng)工作流程如下:啟始時,電流饑餓型振蕩器為輔助振蕩器、輔助振蕩器、x3可變泵電容的電荷泵提供時鐘信號進行升壓,使系統(tǒng)進入正常穩(wěn)定工作狀態(tài),啟動過程階段滯后控制器的調(diào)節(jié)通過和MPPT環(huán)路均不工作。當(dāng)輸入電壓達(dá)到3.3V以后開始進入正常工作模式,兩個穩(wěn)定環(huán)路開始工作。滯后比較器由兩個開關(guān)閾值VH和VL,當(dāng)Vcp電壓高于閾值VH電壓時,慢速滯后控制比較器輸出信號開關(guān)Msw打開,使存儲在緩沖電容中的能量提供個負(fù)載。能量快速下降,當(dāng)Vcp電壓低于閾值VL電壓時,此時采用滯后控制器中高速比較器準(zhǔn)確輸出控制信號斷開開關(guān)Msw,將采集能量源的能量暫時儲存在緩沖電容中,重復(fù)以上過程。在系統(tǒng)工作過程中,最大功率點追蹤在Vcp電壓低于閾值VL電壓時比較器準(zhǔn)確輸出信號斷開開關(guān)Msw之后Vcp電壓充電上升至VH之前。系統(tǒng)時鐘CLK由電流饑餓型振蕩器產(chǎn)生,與此同時主電荷泵時鐘CLK1,2進行2倍頻生成CLKSEN信號提供給FSM進行計數(shù),其中當(dāng)滯后調(diào)節(jié)器輸出SSW作為有限狀態(tài)機的驅(qū)動時鐘,有限狀態(tài)機對CLKSEN進行計數(shù),當(dāng)充電到VH的充電時間Tr越長時,計數(shù)器時鐘越大,便實現(xiàn)了時間到數(shù)字的轉(zhuǎn)換。當(dāng)充電時間計數(shù)越多時,說明充電時間Tr越慢,輸出功率越小。反之,當(dāng)充電時間計數(shù)越少時,說明充電時間Tr越快,輸出功率越大。(有公式推導(dǎo)證明)通過時間計數(shù)的多少完成了功率大小的比較。基本上所有電荷泵都可以使用變壓器模型進行建模如圖
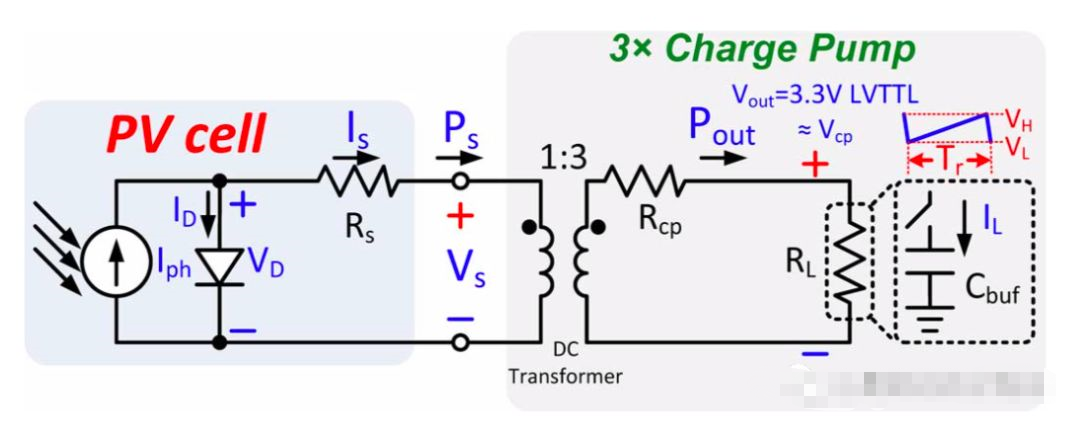
圖三電荷泵與PV cell 等效模型
三,我們得出電荷泵的等效SSL輸入電阻與電荷泵的時鐘頻率和泵電容大小的乘積成反比,因此為了實現(xiàn)電阻匹配達(dá)到最大功率傳輸,通過修改頻率和電荷泵電容參數(shù)之一便可以達(dá)到修改輸入電阻,實現(xiàn)阻抗的匹配。文中為了降低功耗,不采用改變時鐘頻率的方式,而采用電容陣列修改泵電容大小來完成輸入阻抗的改變。MPPT工作開始時,電荷泵電容陣列為最大,如電容數(shù)目為N,也就是此時輸入電阻Rcp的數(shù)值最小時,通過對緩沖電容充電至放電前記錄充電時間計數(shù)器數(shù)值T1,緩沖電容放電,并復(fù)位計數(shù)器模塊,開始新一輪充放電過程。接著電荷泵電容陣列數(shù)目減小,電容數(shù)目為N-1,輸入電阻Rcp的數(shù)值增大,通過對緩沖電容充電至放電前記錄充電時間計數(shù)器數(shù)值T2,比較兩個計數(shù)器大小決定是否減少電容數(shù)目,繼續(xù)MPPT過程,直至Tr充電時間最短時,即計數(shù)器數(shù)目最小時,此時功率最大,完成MPPT過程,并鎖定此狀態(tài)。大概過程就是,改變泵電容大小,實現(xiàn)電荷泵輸入電阻的改變,尋找最佳匹配電阻值,通過功率大小體現(xiàn)電阻的匹配程度。功率越大說明匹配性越好,反之電阻匹配性差。那么問題來了,功率大小如何比較呢?文中便采用計數(shù)時間的長短與功率大小的關(guān)系,通過計數(shù)器記錄充電時間的長短,完成輸出功率大小比較,最終找到最大的輸出功率。文中采用共用滯后控制器在FSM和調(diào)節(jié)路徑,降低了靜態(tài)功耗,另外對于X3電荷泵通過采用新結(jié)構(gòu),增大柵源電壓和2組非重疊時鐘降低了開關(guān)的導(dǎo)通電阻和傳導(dǎo)損耗以及反應(yīng)電荷傳輸。除此之外,文中的MPPT過程是一個單邊的尋跡過程,將不會出現(xiàn)雙邊MPPT尋找過程中出現(xiàn)振蕩現(xiàn)象,造成最大功率點追蹤的失敗。所有模塊盡量減少使用模擬電路單元,更多使用數(shù)字單元代替,為了降低靜態(tài)功耗,提高功率的轉(zhuǎn)換效率。
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756575 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2913文章
44923瀏覽量
377011 -
電荷泵
+關(guān)注
關(guān)注
3文章
239瀏覽量
29665 -
能量
+關(guān)注
關(guān)注
0文章
105瀏覽量
16554 -
采集電路
+關(guān)注
關(guān)注
3文章
28瀏覽量
12315
發(fā)布評論請先 登錄
相關(guān)推薦
能量采集:電能量采集與管理系統(tǒng)
能量采集功率轉(zhuǎn)換的新進展
LLC諧振變換電路的工作原理是什么
液控電路工作原理
電池電路工作原理
開關(guān)電源保護電路的工作原理

振弦采集儀的工作原理及應(yīng)用范圍

電機驅(qū)動電路工作原理
RTU數(shù)據(jù)采集終端的工作原理

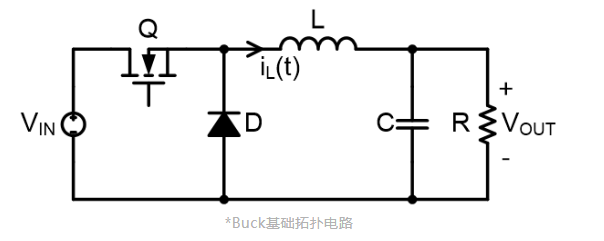
buck電路工作原理和應(yīng)用介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論