") 降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式
降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式
隨著家庭和辦公室開放式布局設(shè)計(jì)的出現(xiàn)以及日漸轉(zhuǎn)向混合動(dòng)力電動(dòng)汽車和電動(dòng)汽車,愈發(fā)需要更安靜、高效的電機(jī)控制。即使是非常小的聲學(xué)差異,也會(huì)對(duì)可聞噪聲造成顯著影響。
利用具有更高功率密度、更高集成度和更高效系統(tǒng)的電機(jī)控制電路等先進(jìn)的實(shí)時(shí)控制技術(shù),可幫助您實(shí)現(xiàn)更出色的系統(tǒng)聲學(xué)性能。一些其他策略包括使用連續(xù)脈寬調(diào)制 (PWM) 的矢量磁場(chǎng)定向控制 (FOC) 算法,減少振動(dòng)的特定控制算法,以及應(yīng)用死區(qū)時(shí)間補(bǔ)償和 PWM 生成來降低可聞噪聲的集成控制。
由于這些不同的產(chǎn)品和策略都可以降低運(yùn)動(dòng)控制應(yīng)用中的可聞噪聲,因此可能很難確定哪種策略更適合您的應(yīng)用。在本文中,我將以 BLDC 集成控制柵極驅(qū)動(dòng)器為例,列出降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式。
PWM
用于降低電機(jī)控制應(yīng)用中可聞噪聲的第一種策略是連續(xù) PWM。PWM 是一種技術(shù),通過導(dǎo)通和關(guān)斷晶體管來產(chǎn)生輸出波形,從而讓電機(jī)電壓在給定時(shí)間處于高電壓或低電壓狀態(tài)。然后,電機(jī)中的電感對(duì)這些波形進(jìn)行濾波,以便基本上平均輸出波形。調(diào)整占空比(波形導(dǎo)通時(shí)間與關(guān)斷時(shí)間之比)將改變平均電壓。圖 2 展示了使用 PWM 生成正弦波的一個(gè)示例。

圖 2:使用 PWM 生成正弦波的示例
例如,德州儀器 (TI) MCF8315A BLDC 集成控制柵極驅(qū)動(dòng)器是一款無傳感器 FOC 電機(jī)驅(qū)動(dòng)器,可實(shí)現(xiàn)連續(xù)和非連續(xù)空間矢量 PWM 方案。連續(xù)調(diào)制有助于減小低電感電機(jī)的電流紋波,但由于所有三個(gè)相位互相交錯(cuò),因此會(huì)導(dǎo)致更高的開關(guān)損耗。非連續(xù)調(diào)制的開關(guān)損耗更低(因?yàn)橐淮沃挥袃蓚€(gè)相位互相交錯(cuò)),但電流波紋更高。在圖 3 和圖 4 中,您可以看到連續(xù)和非連續(xù) PWM 的差異。
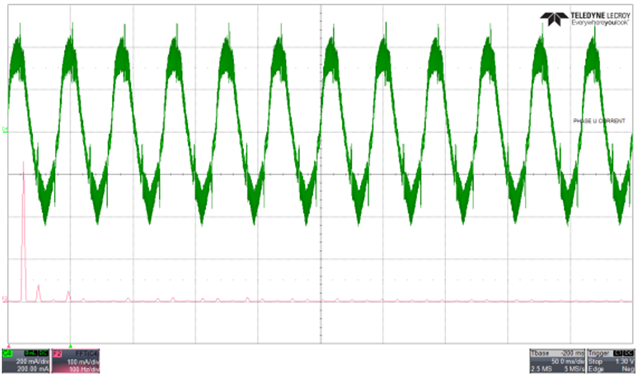
圖 3:相電流波形與快速傅里葉變換 (FFT) 非連續(xù) PWM 之間的關(guān)系
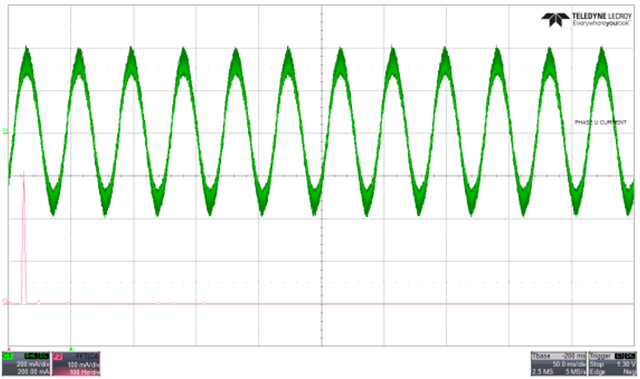
圖 4:相電流波形與 FFT 連續(xù) PWM 之間的關(guān)系
死區(qū)時(shí)間補(bǔ)償
用于降低電機(jī)控制應(yīng)用中可聞噪聲的第二種策略是死區(qū)時(shí)間補(bǔ)償。在電機(jī)控制應(yīng)用中,在半橋中高側(cè)和低側(cè)金屬氧化物半導(dǎo)體場(chǎng)效應(yīng)晶體管的開關(guān)之間插入死區(qū)時(shí)間可避免發(fā)生擊穿。插入死區(qū)時(shí)間后,相節(jié)點(diǎn)上的預(yù)期電壓與施加的電壓會(huì)有所不同,相節(jié)點(diǎn)電壓會(huì)在相電流中引入不必要的失真,進(jìn)而導(dǎo)致可聞噪聲。
要管理這種額外的噪聲,工程師可以利用諧振控制器集成死區(qū)時(shí)間補(bǔ)償,以便控制相電流中的諧波分量,從而緩解因死區(qū)時(shí)間導(dǎo)致的電流失真,如圖 5 所示。
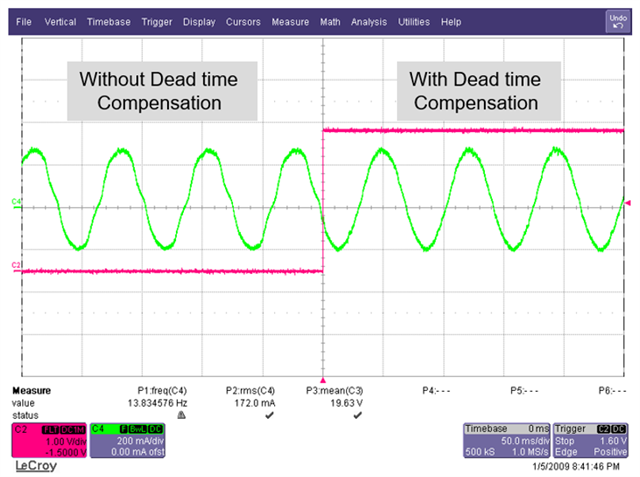
圖 5:無傳感器 FOC 死區(qū)時(shí)間補(bǔ)償分析
例如,TI 的 MCF8316A BLDC 集成控制柵極驅(qū)動(dòng)器(一款無傳感器 FOC 電機(jī)驅(qū)動(dòng)器)采用此內(nèi)置功能來優(yōu)化多種電機(jī)頻率下的聲學(xué)性能,如圖 6 所示。
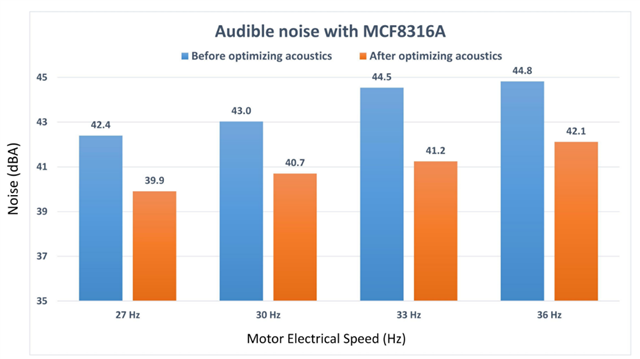
圖 6:實(shí)施 PWM 調(diào)制和死區(qū)時(shí)間補(bǔ)償來優(yōu)化 MCF8316A 聲學(xué)性能
可變換向模式
用于降低電機(jī)控制應(yīng)用中可聞噪聲的最后一種策略是可變換向模式。在梯形換向中,有兩種主要配置:120 度和 150 度。120 度梯形換向可能會(huì)導(dǎo)致更多的聲學(xué)噪聲,因?yàn)檩^長(zhǎng)的高阻抗周期會(huì)導(dǎo)致扭矩波紋增大,如圖 7 和 8 所示。150 度梯形換向只能在低速下運(yùn)行,因?yàn)?a target="_blank">檢測(cè)過零的窗口期很短。
為了應(yīng)對(duì)這些挑戰(zhàn)并提高聲學(xué)性能,工程師可以構(gòu)建能夠在 120 度梯形換向和 150 度梯形換向之間動(dòng)態(tài)切換的電機(jī)驅(qū)動(dòng)器系統(tǒng)。這種動(dòng)態(tài)調(diào)制可以改善 BLDC 電機(jī)控制期間的整體聲學(xué)性能。
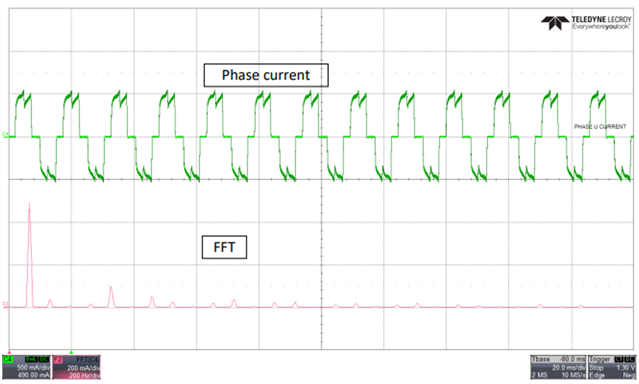
圖 7:相電流和 FFT - 120 度換向
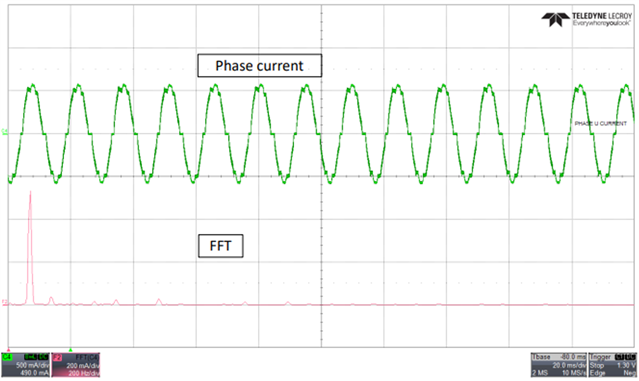
圖 8:相電流和 FFT - 150 度換向
例如,TI 無傳感器 BLDC 集成梯形控制柵極驅(qū)動(dòng)器(如 MCT8329 和 MCT8316)采用此內(nèi)置功能來優(yōu)化多種電機(jī)頻率下的聲學(xué)性能,如圖 9 所示。
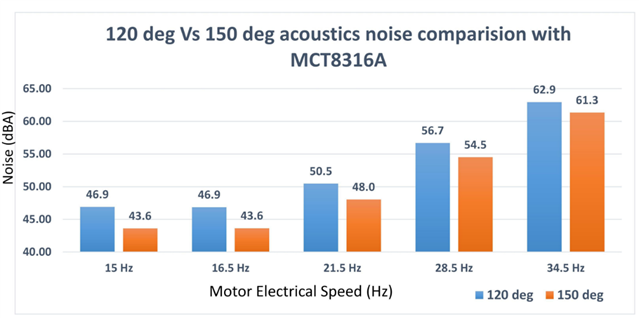
圖 9:實(shí)施具有動(dòng)態(tài)調(diào)制的可變換向模式來優(yōu)化 MCT8316A 聲學(xué)性能
結(jié)語
TI 在加大運(yùn)動(dòng)控制技術(shù)的投資,助力構(gòu)建更高效的聲學(xué)敏感型系統(tǒng),其構(gòu)建塊旨在滿足聲學(xué)要求。當(dāng)您設(shè)計(jì)系統(tǒng)時(shí),請(qǐng)記得采用這三種出色方式來降低電機(jī)控制應(yīng)用中的可聞噪聲。
審核編輯:郭婷
-
PWM
+關(guān)注
關(guān)注
114文章
5198瀏覽量
214902 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9088瀏覽量
146387 -
晶體管
+關(guān)注
關(guān)注
77文章
9746瀏覽量
138918
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
伺服電機(jī)的三種控制方式
降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的方法

深度解讀伺服電機(jī)的三種控制方式

降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式
降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種方式

降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式
淺談伺服電機(jī)的三種控制方式

降低MOSFET 1/f噪聲的三種辦法是什么?
變頻器的三種控制方式 | 變頻器三種控制方式的優(yōu)缺點(diǎn)

運(yùn)動(dòng)控制的三種控制方式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論