") 介紹一種基于編碼器合成里程計(jì)的方案
介紹一種基于編碼器合成里程計(jì)的方案
摘要:本文主要分析輪式移動(dòng)機(jī)器人的通用里程計(jì)模型,并以兩輪差速驅(qū)動(dòng)機(jī)器人的里程計(jì)計(jì)算為案例,給出簡化后的兩輪差速驅(qū)動(dòng)機(jī)器人里程計(jì)模型。
01
引言
里程計(jì)是機(jī)器人導(dǎo)航系統(tǒng)中非常重要的一環(huán),那么何為里程計(jì)?
里程計(jì),可簡單理解為記錄機(jī)器人在一段時(shí)間內(nèi)的運(yùn)動(dòng)狀態(tài),是基于時(shí)間戳的數(shù)據(jù)幀,該數(shù)據(jù)幀包含機(jī)器人位置、姿態(tài)及運(yùn)動(dòng)速度、角速度,具體結(jié)構(gòu)對應(yīng)下圖 1.1。
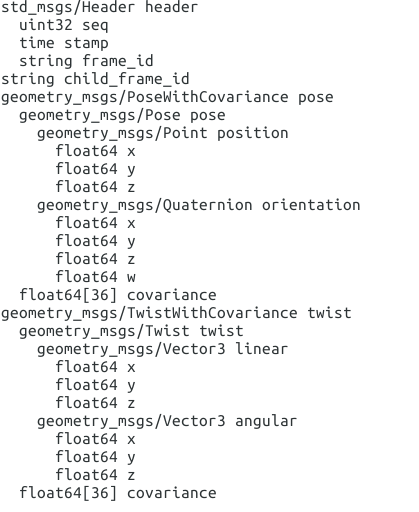
圖 1.1 ROS里程計(jì)數(shù)據(jù)結(jié)構(gòu)
里程計(jì)的英文單詞是Odometry,在ROS小車坐標(biāo)系樹里面有一個(gè)里程計(jì)專用坐標(biāo)系,叫做Odom。
但凡涉及到可移動(dòng)的機(jī)器人的導(dǎo)航系統(tǒng),大概率會(huì)涉及到里程計(jì)的計(jì)算,比如輪式移動(dòng)機(jī)器人、無人機(jī)、無人艇,以及多足機(jī)器人等,而計(jì)算里程計(jì)的方案也有很多種,比如基于編碼器合成里程計(jì)的方案、基于視覺的里程計(jì)方案(ORB SLAM)、基于激光雷達(dá)的里程計(jì)方案(Hector SLAM)、基于IMU的里程計(jì)方案,以及多傳感器融合的方案。
本文主要以輪式移動(dòng)機(jī)器人為載體介紹基于編碼器合成里程計(jì)的方案,這是非常經(jīng)典常用的里程計(jì)計(jì)算方法之一,在輪式移動(dòng)機(jī)器人領(lǐng)域有著廣泛的應(yīng)用。
02
里程計(jì)模型分析
從圖 1.1可以看出,里程計(jì)主要包含的信息有兩部分:速度和位姿,因此接下來將從這兩個(gè)方面展開介紹。
2.1 速度計(jì)算
2.1.1 輪速計(jì)算
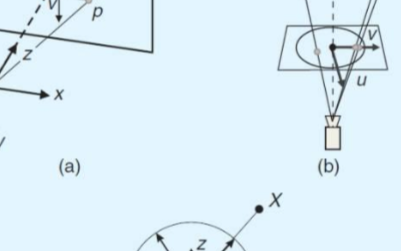
輪式機(jī)器人的驅(qū)動(dòng)輪是由伺服電機(jī)驅(qū)動(dòng)的,而電機(jī)轉(zhuǎn)軸后安裝有編碼器,通過編碼器采集的數(shù)據(jù)可以計(jì)算出電機(jī)輸出軸轉(zhuǎn)過的角度。
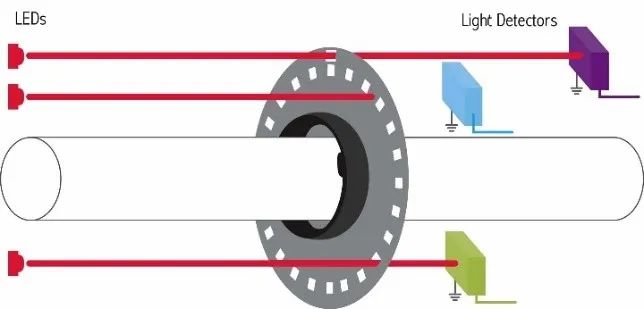
(a)編碼器結(jié)構(gòu)
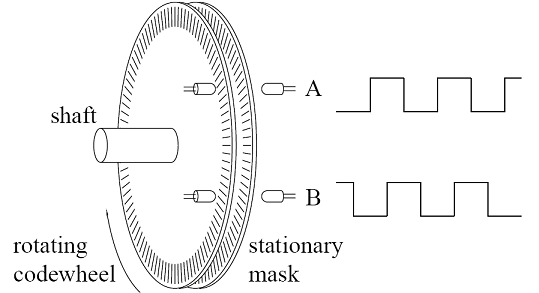
(b)編碼器輸出波形
圖 2.1 光電編碼器原理
編碼器的種類很多,比如增量式光電編碼器(圖 2.1),紅色的光源是固定不動(dòng)的,當(dāng)光柵(圖中灰色帶孔圓盤)轉(zhuǎn)動(dòng)的同時(shí),其電路結(jié)構(gòu)會(huì)輸出A、B兩相的方波,使用單片機(jī)GPIO的中斷模式可采集到方波邊沿,進(jìn)而進(jìn)行計(jì)數(shù),當(dāng)電機(jī)軸轉(zhuǎn)動(dòng)一圈,可獲取總計(jì)數(shù)為N(可能是512、也可能是1024,這與編碼器分辨率有關(guān))。
這樣就可以將所有驅(qū)動(dòng)輪的線速度計(jì)算出來,如果驅(qū)動(dòng)輪與地面之間沒有相對滑動(dòng)(也就是打滑),那么該線速度也就是驅(qū)動(dòng)輪在地面上的運(yùn)動(dòng)線速度。
2.1.2 Odom速度計(jì)算
Odom坐標(biāo)系一般與建立機(jī)器人運(yùn)動(dòng)學(xué)模型時(shí)的坐標(biāo)系相同,也就是機(jī)器人零半徑轉(zhuǎn)彎的旋轉(zhuǎn)中心為坐標(biāo)系原點(diǎn),具體可參考《常見移動(dòng)機(jī)器人運(yùn)動(dòng)學(xué)模型總結(jié)》。
需要注意的是,Odom是一個(gè)運(yùn)動(dòng)的坐標(biāo)系,會(huì)隨著機(jī)器人的運(yùn)動(dòng)而運(yùn)動(dòng),但是Odom記錄的是運(yùn)動(dòng)過程中的Odom坐標(biāo)系狀態(tài)參數(shù)(速度、位姿)是在初始位姿的Odom的坐標(biāo)系中描述的,如下圖所示:記錄的是Odom(tk)在Odom(t0)坐標(biāo)系下的位姿和速度。
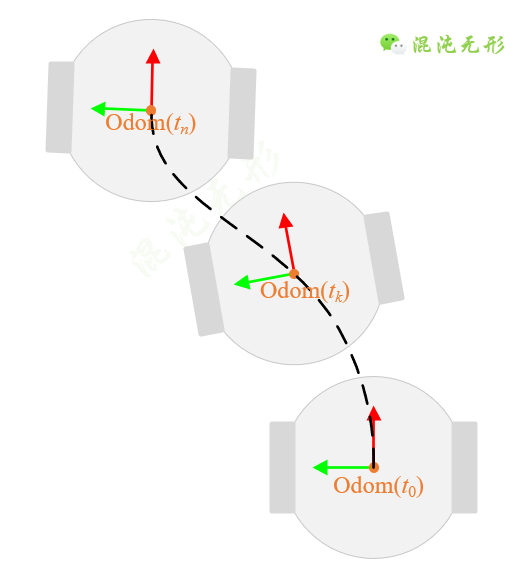
圖 2.2 差速驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)及其軌跡
這里需要正運(yùn)動(dòng)學(xué)模型來計(jì)算Odom坐標(biāo)系原點(diǎn)的運(yùn)動(dòng)速度,以兩輪差速驅(qū)動(dòng)機(jī)器人為例,可表示為
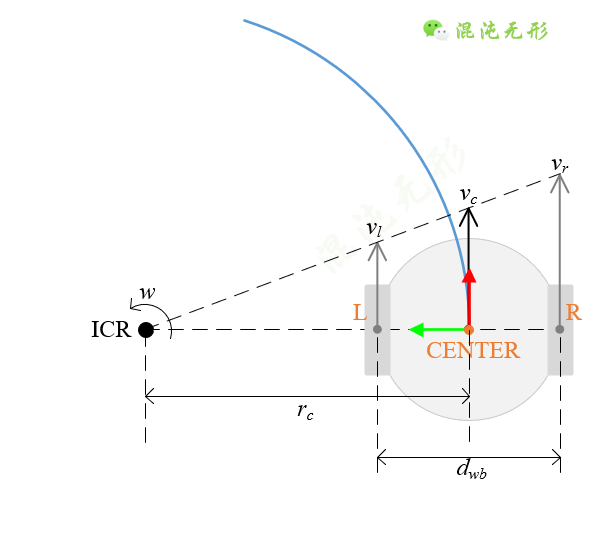
圖 2.3 兩輪差速模型.機(jī)器人的外輪廓可視為圓形,直徑為dwb,ICR表示瞬時(shí)旋轉(zhuǎn)中心,藍(lán)色圓弧表示機(jī)器人運(yùn)動(dòng)路徑,點(diǎn)L和R分別為左右輪與地面的接觸點(diǎn)。
運(yùn)動(dòng)學(xué)模型寫為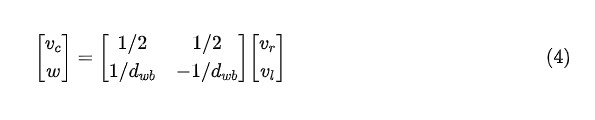
其中,vr和vl分別表示兩驅(qū)動(dòng)輪的線速度,是可以通過章節(jié)2.1.1中的方法計(jì)算出來的,因此幾何中心的線速度vc和角速度w就可以通過公式(4)計(jì)算出來。公式(4)中的vc也就是Odom坐標(biāo)系x軸的線速度vx,由于兩輪差速驅(qū)動(dòng)機(jī)器人的非完整性約束(具體分析可參考《兩輪差速驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)模型及應(yīng)用分析》),線速度vy和vz均為0,而公式(4)中的角速度w是Odom坐標(biāo)系z軸的角速度wz,其余角速度wx和wy均為0。
從公式(4)中可以看出,除了前面提到的輪直徑需要校準(zhǔn)之外,還需對輪間距dwb進(jìn)行校準(zhǔn),由此實(shí)現(xiàn)
由此,圖 1.1中的的Odom結(jié)構(gòu)體中的Twist子結(jié)構(gòu)體可寫為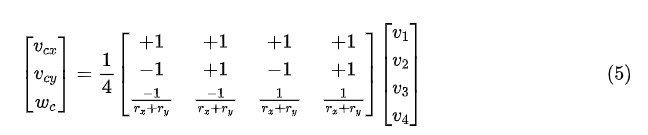
表 2?1 兩輪差速驅(qū)動(dòng)機(jī)器人Twist信息
| linear | angular | |
|---|---|---|
| x | vc | 0 |
| y | 0 | 0 |
| z | 0 | w |
以上是兩輪差速驅(qū)動(dòng)機(jī)器人的速度計(jì)算思路,而麥輪移動(dòng)平臺與之不同,屬于全向移動(dòng)機(jī)器人,是包含3個(gè)自由度,對應(yīng)的運(yùn)動(dòng)學(xué)模型也是不一樣的,寫為
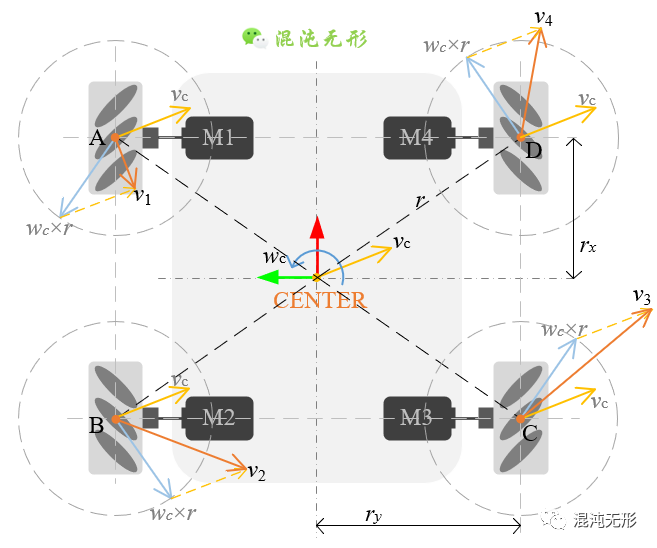
圖 2.4 麥輪平臺運(yùn)動(dòng)分解示意圖. 圖中r表示中心點(diǎn)CENTER到麥輪與地面接觸點(diǎn)之間的距離,rx和ry分別表示r在CENTER坐標(biāo)系x軸和y軸上的投影距離(均為正值).
采用同樣的思路,計(jì)算出四個(gè)驅(qū)動(dòng)輪的線速度,結(jié)合公式(5)便可得到麥輪平臺中心的速度信息。
由此,圖 1.1中的的Odom結(jié)構(gòu)體中的Twist子結(jié)構(gòu)體可寫為
表 2?2 麥輪移動(dòng)平臺Twist信息
| linear | angular | |
|---|---|---|
| x | vcx | 0 |
| y | vcy | 0 |
| z | 0 | wc |
除了兩輪差速驅(qū)動(dòng)機(jī)器人和麥輪移動(dòng)平臺,均可以通過上述思路計(jì)算得到里程計(jì)中的Twist信息。
2.2 位姿計(jì)算
計(jì)算Odom的位姿是依賴于章節(jié)2.1.2中的速度信息的,我們知道速度對時(shí)間積分就是位移,角速度對時(shí)間積分就是轉(zhuǎn)角。而里程計(jì)記錄的是機(jī)器人在某一時(shí)間段內(nèi)的運(yùn)動(dòng)軌跡,也就是位姿變換過程(如圖 2.2所示),需要用遞推方程表示,如果是兩輪差速驅(qū)動(dòng)機(jī)器人,寫為: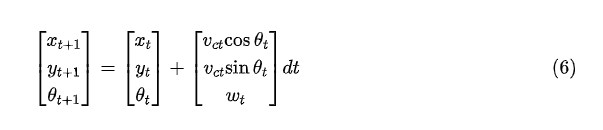
式中,[x y θ]分別表示兩輪差速驅(qū)動(dòng)機(jī)器人在某時(shí)刻的位置和姿態(tài)角
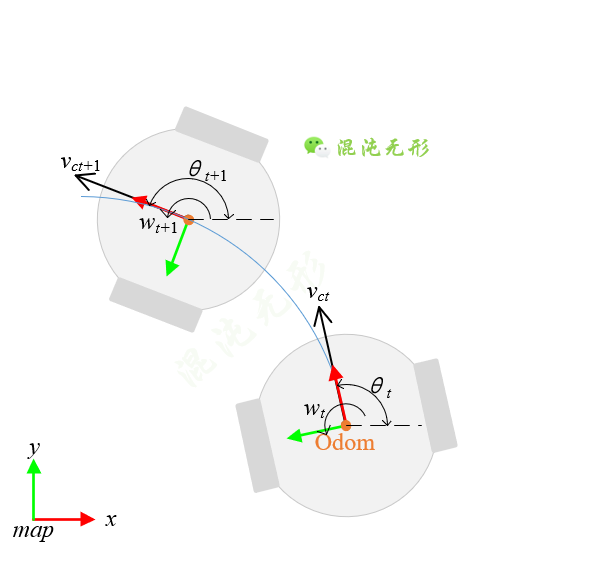
圖 2.5 兩輪差速驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)過程. 藍(lán)色弧線表示運(yùn)動(dòng)軌跡
結(jié)合圖 2.5來解釋公式(6),從公式(6)可以看出是做了近似處理,包括:dt時(shí)間內(nèi)假設(shè)機(jī)器人是以[vc w]的速度進(jìn)行勻速運(yùn)動(dòng),但實(shí)際速度肯定不是勻速運(yùn)動(dòng)的,這存在誤差;另外,驅(qū)動(dòng)輪可能存在微弱打滑的情況,也會(huì)引入誤差;最后,兩輪差速驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)軌跡是圓弧曲線,速度方向是沿著圓弧切線方向的變化而變化的,但這里假設(shè)dt時(shí)間間隔很短,故“以直代曲”,認(rèn)為機(jī)器人運(yùn)動(dòng)軌跡是直線段、速度方向也是不變的,在dt時(shí)間內(nèi)保持著θ的方向,所以也會(huì)引入誤差。
如果是麥輪移動(dòng)平臺,原理也是和兩輪差速驅(qū)動(dòng)機(jī)器人一致的,但又有些區(qū)別:麥輪平臺多了一個(gè)自由度,但可以從速度分解(或運(yùn)動(dòng)合成)的角度分析
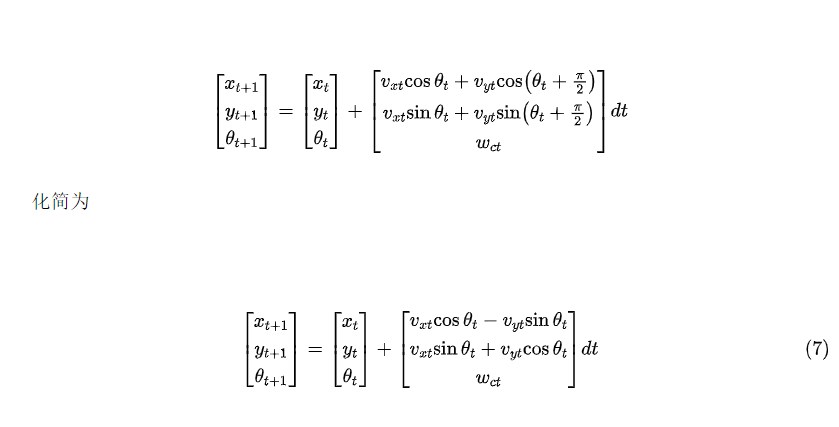
麥輪移動(dòng)平臺公式也包含了兩輪差速驅(qū)動(dòng)機(jī)器人的近似處理思想。
綜合上述分析,可以計(jì)算得到t時(shí)刻下機(jī)器人的運(yùn)動(dòng)速度、位姿信息,合在一起也就是里程計(jì)信息了。
03
案例分析
從前面的分析可以看出,在計(jì)算速度、位姿時(shí),經(jīng)過多次運(yùn)算,位姿計(jì)算精度有所降低,此外,計(jì)算速度和位姿時(shí),都需要一個(gè)時(shí)間間隔dt,那么可以從這個(gè)dt入手,進(jìn)一步化簡,得到更簡潔、優(yōu)雅的公式。
這里以兩輪差速機(jī)器人為例,計(jì)算化簡里程計(jì)公式。
假設(shè)差速機(jī)器人在極短的dt時(shí)間內(nèi)運(yùn)動(dòng)了一小節(jié)距離,故可視為在dt時(shí)間內(nèi)機(jī)器人做勻速運(yùn)動(dòng),如圖 3.1所示,在極短時(shí)間內(nèi)做勻速運(yùn)動(dòng),可寫為
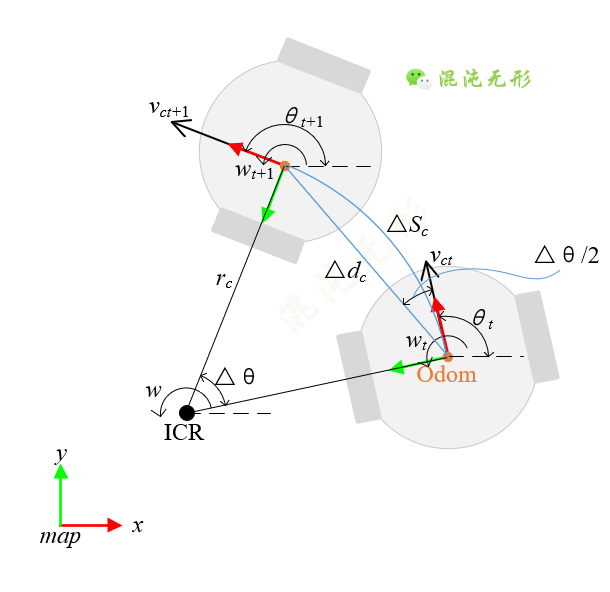
圖 3.1 差速驅(qū)動(dòng)機(jī)器人里程計(jì)示意圖
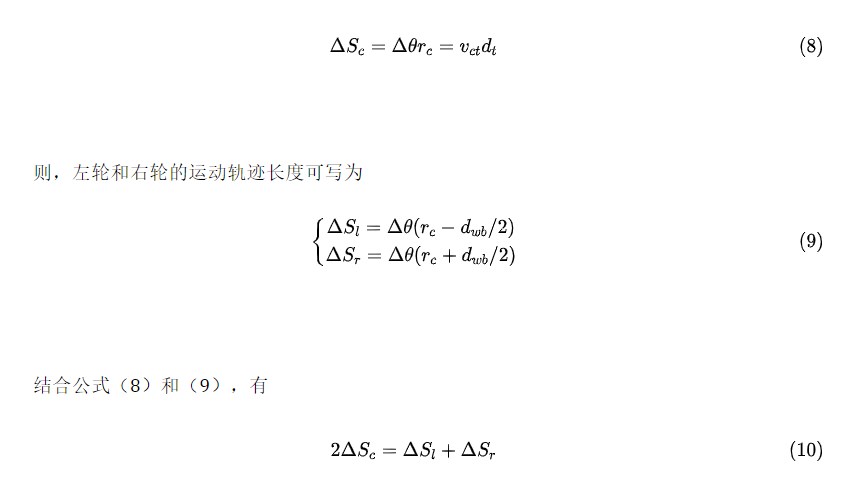
如果機(jī)器人做勻速運(yùn)動(dòng),且存在角速度,那么機(jī)器人中心的運(yùn)動(dòng)軌跡一定是一段標(biāo)準(zhǔn)的圓弧,其長度表示為△Sc,對應(yīng)的圓心角為△θ,因此有下面的這個(gè)關(guān)系式
為后續(xù)計(jì)算,這里需要對公式(6)做一個(gè)修正,細(xì)心的讀者可能已經(jīng)發(fā)現(xiàn)問題了,在公式(6)中,方向角使用的是θt,也就是速度vct的方向,這個(gè)方向和△dc的方向之間存在一個(gè)夾角,這個(gè)夾角的大小是△θ/2,使用△dc的方向比速度vct的方向更加準(zhǔn)確,因此修正后的公式(6)為
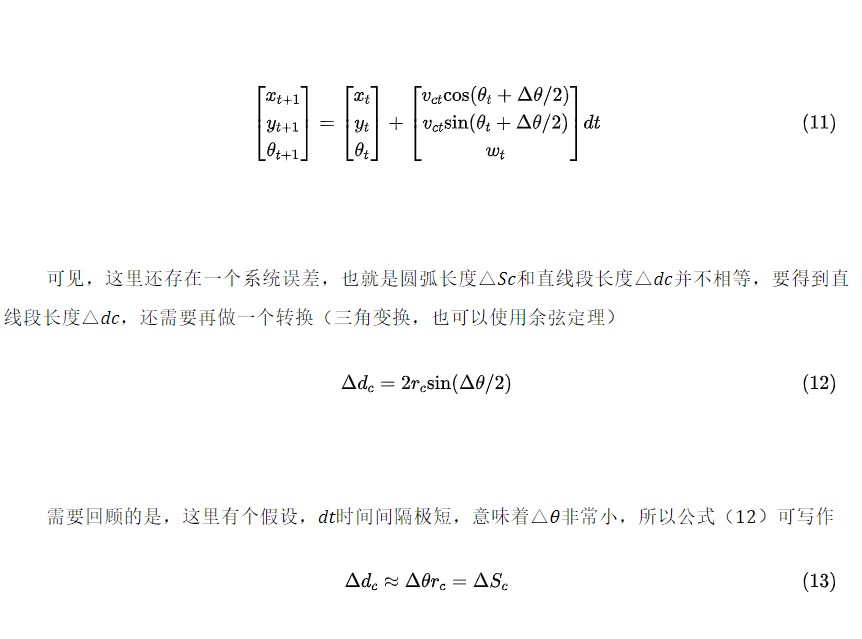
從公式(13)可以看出,兜兜轉(zhuǎn)轉(zhuǎn),又回到了公式(8),這里就需要做一個(gè)權(quán)衡,如果dt時(shí)間間隔極短,那么可以取近似值,也就是認(rèn)為△dc≈△Sc,以直代曲,如果dt時(shí)間間隔偏長,那么可以采用公式(12)計(jì)算,計(jì)算中包含正弦函數(shù),但會(huì)降低計(jì)算效率、損失計(jì)算精度。
這里就采用“以直代曲”的方式來做進(jìn)一步計(jì)算:
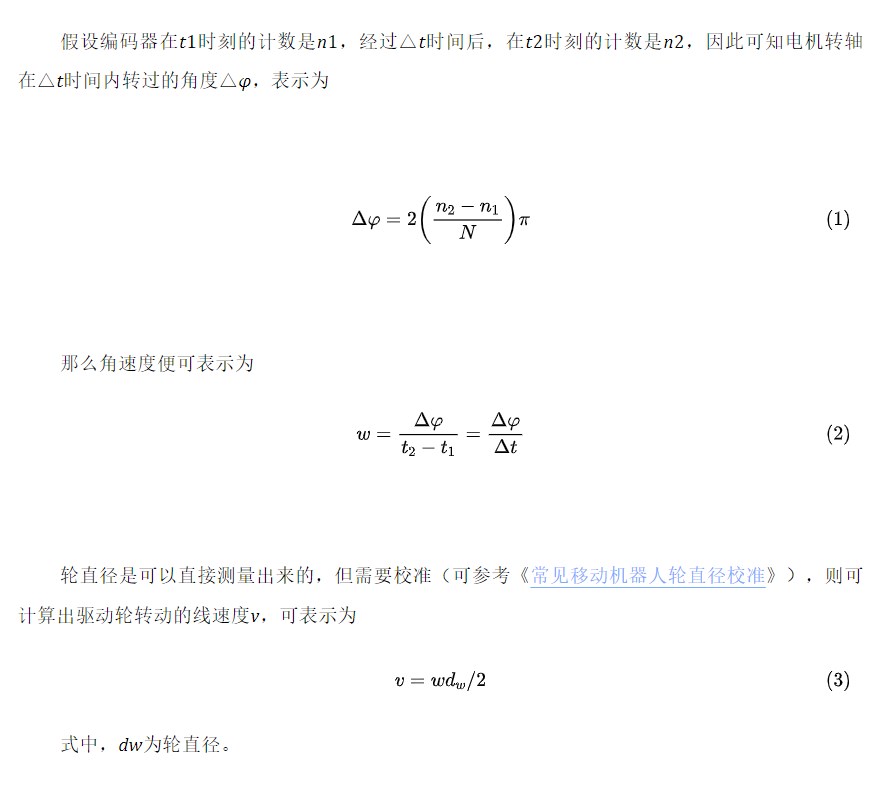
從公式(17)可知,僅需要計(jì)算左右驅(qū)動(dòng)輪在dt時(shí)間內(nèi)運(yùn)動(dòng)過路程,便可得到dt時(shí)刻的位姿,回顧到本文的章節(jié)2.1.1的輪速計(jì)算,根據(jù)公式(1)可以計(jì)算驅(qū)動(dòng)輪轉(zhuǎn)過的角度,因此可以得到運(yùn)動(dòng)的路程
式中,nl1、nl2分辨表示左輪在時(shí)間dt前后采集的左輪編碼器讀數(shù),nr1、nr2分辨表示右輪在時(shí)間dt前后采集的右輪編碼器讀數(shù)。
所以,將公式(17)和(18)相結(jié)合,僅需要定期采集編碼器讀數(shù),即可更新里程計(jì)中的位姿信息,而速度信息也是可以根據(jù)公式(2)和(3),結(jié)合運(yùn)動(dòng)學(xué)模型計(jì)算出來。而在實(shí)際應(yīng)用中,編碼器采集頻率和里程計(jì)更新頻率保持一致(或整數(shù)倍),這樣更利于計(jì)算,減少重復(fù)計(jì)算帶來的精度損失和時(shí)間消耗。
從前面的公式可以看出,要得到更準(zhǔn)確的里程計(jì)參數(shù),需要對差速驅(qū)動(dòng)機(jī)器人的輪直徑和輪間距進(jìn)行校準(zhǔn)。
其他的機(jī)器人里程計(jì)模型也可以參考兩輪差速驅(qū)動(dòng)機(jī)器人案例,做進(jìn)一步化簡,減少重復(fù)計(jì)算。
04
結(jié)論及展望
本文主要從編碼器原理介紹、輪速計(jì)算及位姿計(jì)算等方面分析了輪式移動(dòng)機(jī)器人的通用里程計(jì)模型,并以兩輪差速驅(qū)動(dòng)機(jī)器人的里程計(jì)計(jì)算為案例,詳細(xì)分析了兩輪差速驅(qū)動(dòng)機(jī)器人運(yùn)動(dòng)規(guī)律及其位姿變換的等效思想,最后給出了簡化后的兩輪差速驅(qū)動(dòng)機(jī)器人里程計(jì)模型。
審核編輯:劉清
-
編碼器
+關(guān)注
關(guān)注
45文章
3667瀏覽量
135240 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
765瀏覽量
33647 -
SLAM
+關(guān)注
關(guān)注
23文章
426瀏覽量
31929 -
IMU
+關(guān)注
關(guān)注
6文章
319瀏覽量
45899 -
orb
+關(guān)注
關(guān)注
0文章
21瀏覽量
9913
原文標(biāo)題:輪式移動(dòng)機(jī)器人里程計(jì)分析
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
關(guān)于自行車速度里程計(jì)的設(shè)計(jì)?求大神指點(diǎn)!!!
求大神幫忙用c語言編寫一個(gè)自行車速度計(jì)和里程計(jì)
如何理解SLAM用到的傳感器輪式里程計(jì)IMU、雷達(dá)、相機(jī)的工作原理與使用場景?精選資料分享
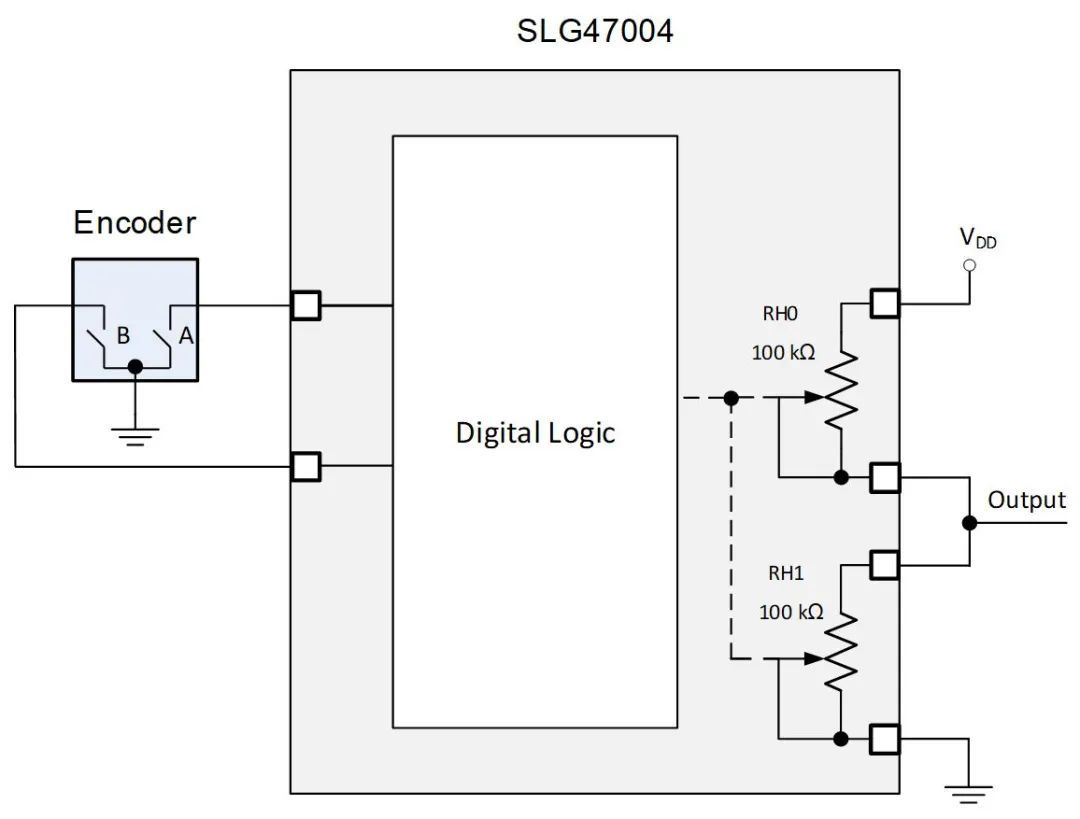
stm32電機(jī)驅(qū)動(dòng)與編碼器讀取
請問如何理解SLAM用到的傳感器輪式里程計(jì)IMU、雷達(dá)、相機(jī)的工作原理?
什么是編碼器 什么叫編碼器 編碼器什么意思
自適應(yīng)旋轉(zhuǎn)編碼器設(shè)計(jì)方案
視覺里程計(jì)的詳細(xì)介紹和算法過程
視覺語義里程計(jì)的詳細(xì)資料說明
基于單個(gè)全景相機(jī)的視覺里程計(jì)
輪式移動(dòng)機(jī)器人里程計(jì)分析
介紹一種新的全景視覺里程計(jì)框架PVO






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論