 咖啡機器人如何實現液體流量控制
咖啡機器人如何實現液體流量控制
咖啡機器人是近年來的一種智能化設備,它的出現大大提高了人們對咖啡制備的要求。在制作咖啡的過程中,液體流量控制是非常重要的一項工作。液體流量控制能夠保證咖啡的品質和口感,因此在咖啡機器人的設計中液體流量控制是至關重要的。下文將介紹如何利用霍爾流量計實現液體流量控制。
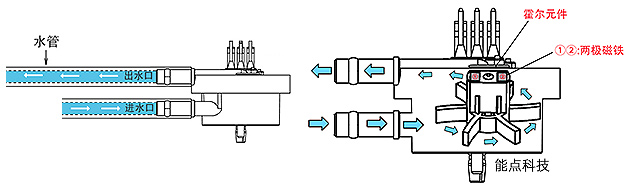
首先,我們需要了解霍爾流量計的原理。霍爾流量計是一種用來測量流體流量的設備,它利用了霍爾效應的原理,通過測量磁場的變化來確定流體流量。其工作原理是通過導電性管道中的磁場感應器將感應到的信號轉換成電信號,然后這個電信號通過數字處理器進行處理,最終輸出流體流量的實時數據。
然后,我們需要將霍爾流量計與咖啡機器人連接起來。在咖啡機器人中,將霍爾流量計安裝在液體管路的某個位置,然后將霍爾流量計與控制模塊連接。在控制模塊中設置液體流量控制參數,如流量大小,流量變化速度等。當咖啡機器人啟動時,液體從儲存槽中流過霍爾流量計,霍爾流量計會感應到液體流動的速度,并將數據傳輸給控制模塊。控制模塊根據輸入的數據和設定的參數,控制電磁閥的開閉,從而實現液體流量控制。
最后,我們需要注重日常維護。為了確保咖啡機器人的正常工作,我們需要定期對霍爾流量計進行清洗和維護,確保其靈敏度和準確性,并及時更換磁場感應器和控制模塊中的相關元件,保證咖啡機器人的整體運作。
綜上所述,利用霍爾流量計實現液體流量控制在咖啡機器人的設計中有著重要的作用,并可以大大提高咖啡的品質和口感,為人們帶來更好的咖啡體驗。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28642瀏覽量
208419 -
流量計
+關注
關注
10文章
1508瀏覽量
53891
發布評論請先 登錄
相關推薦
機器人如何實現移動功能
在前面兩篇《如何制造足球機器人》文章中,我們主要圍繞機器人本體進行了硬件設計,而這次將以控制器為中心,開展軟件設計工作。在正式開始之前,先為大家回顧一下機器人如何
控制咖啡機水溫的關鍵在于NTC溫度傳感器
對于熱愛咖啡的人來說,一杯完美的咖啡需要精心挑選優質的咖啡豆,熟練掌握烘焙技巧,以及恰到好處地控制水溫。在咖啡機中,NTC溫度傳感器扮演著關
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
中取得了令人矚目的效果。
閱讀感悟
從傳統的手動編程到借助大模型實現智能化、自主化,從單一模態的交互到多模態信息的深度融合,再到擴散模型的應用,機器人控制技術正在以驚人的速度進化。這不僅讓機器
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
重要。
書中還詳細介紹了支持具身智能機器人的核心技術系統,包括自主機器人計算系統、感知系統、定位系統及規劃和控制系統。
本書共分5個部分。
第1部分(第1章和第2章)介紹具身智能機器人
發表于 12-28 21:12
如何使用AT指令集實現硬件流量控制?
我嘗試使用 AT 指令集實現硬件流量控制。我已將主機控制器連接到 ESP8266 12S。
引腳 13 似乎一切正常,但引腳 15 看起來像是被拉下來并且永遠不會改變它的狀態,我無法
發表于 07-16 07:23
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
如何使用PLC控制機器人
隨著工業自動化技術的飛速發展,機器人技術作為其中的重要組成部分,其應用范圍日益廣泛。在機器人的控制系統中,PLC(Programmable Logic Controller,可編程邏輯控制
機器人控制系統的基本單元有哪些
引言 機器人是一種具有高度自動化和智能化的設備,它可以模擬人類的行為和思維,完成各種復雜的任務。機器人控制系統是機器人的重要組成部分,它負責接收傳感器的信號,處理數據,
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服的實時性.經測試,該平臺能夠對視覺檢測目標的變化做出及時的反應
發表于 05-29 16:17
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
地毯并增加吸力,或是繞過障礙物進行清掃。同時,通過手機APP遠程控制、語音指令等方式,用戶可以方便地操作掃地機器人,實現個性化的清潔需求。
3.掃地機器人面臨的技術壁壘與客戶體驗問題
發表于 05-05 15:03
NVIDIA助力影智科技xbot咖啡機器人實現自然語義個性化印花咖啡制作
在當今時代,AI 與機器人的結合為各個行業帶來了前所未有的變革。inSpace 影智旗下的 xbot 咖啡機器人,便是這一變革的杰出代表。





 工商網監
工商網監
評論