") 西門子1500系列創(chuàng)建軸并模擬運(yùn)行的過程
西門子1500系列創(chuàng)建軸并模擬運(yùn)行的過程
西門子電機(jī)變頻調(diào)速控制以前多在驅(qū)動(dòng)控制器中實(shí)現(xiàn),例如Cu320、Cu310等控制單元,使用Scout軟件進(jìn)行配置。對(duì)于使用者來講,Scout使用難度相對(duì)較大。現(xiàn)在西門子逐漸將驅(qū)動(dòng)功能放在PLC中完成。下面按步驟介紹創(chuàng)建軸并模擬運(yùn)行的過程。
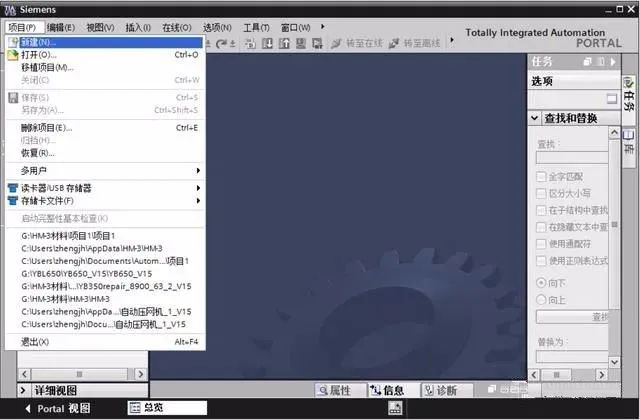
首先打開博途V15.0軟件,選擇新建項(xiàng)目。
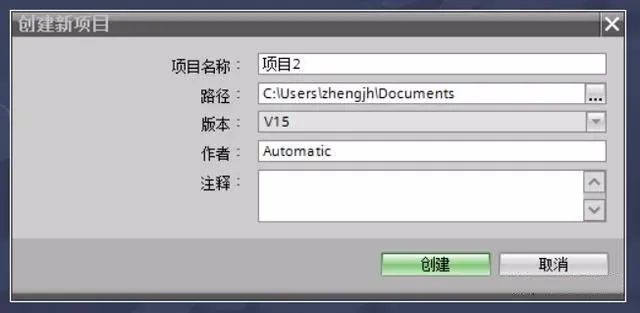
在對(duì)話框中輸入項(xiàng)目名稱,存儲(chǔ)路徑,作者名字等,點(diǎn)擊"創(chuàng)建"。
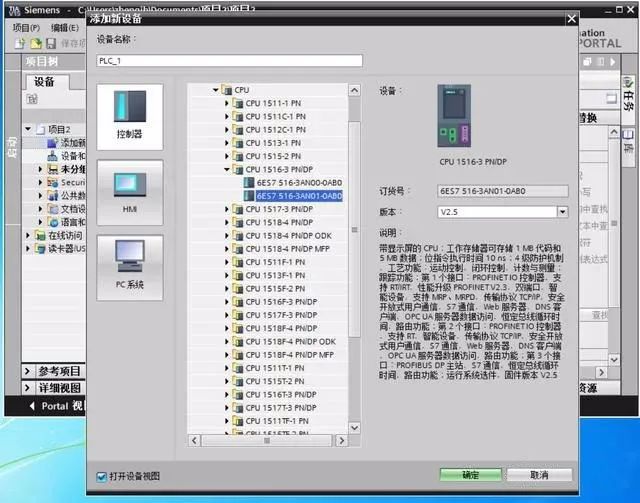
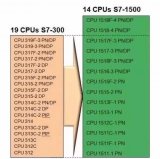
創(chuàng)建好項(xiàng)目后在項(xiàng)目樹中點(diǎn)擊"添加新設(shè)備",出現(xiàn)的對(duì)話框中選擇"控制器",然后找到使用的PLC型號(hào)和版本,此處使用CPU1516-3的最新版本。
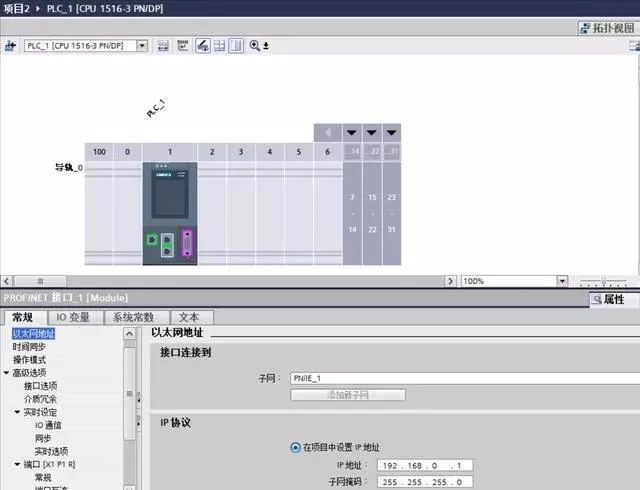
點(diǎn)擊確定后出現(xiàn)硬件組態(tài)畫面,給PLC設(shè)定子網(wǎng)參數(shù),此處使用默認(rèn)值。
然后添加驅(qū)動(dòng)信息,根據(jù)下圖所示找到使用的驅(qū)動(dòng)型號(hào)。此處使用Cu310-2。
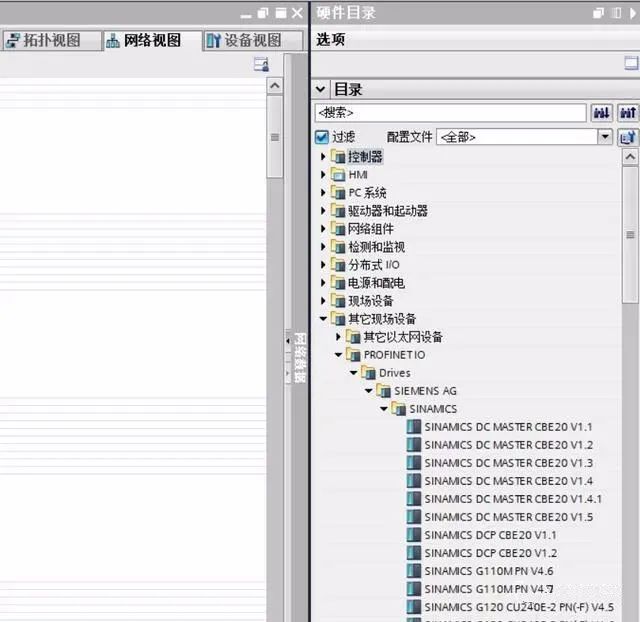
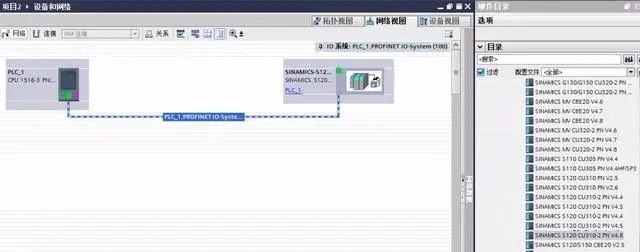
選好后拖拽到硬件組態(tài)中,然后設(shè)定總線使用之前PLC創(chuàng)建的PN1。
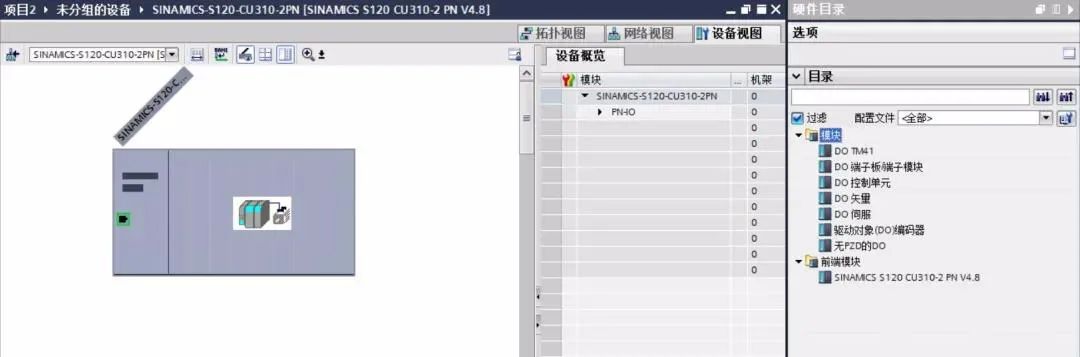
對(duì)驅(qū)動(dòng)控制器進(jìn)行配置,選擇矢量類型,標(biāo)準(zhǔn)報(bào)文2。

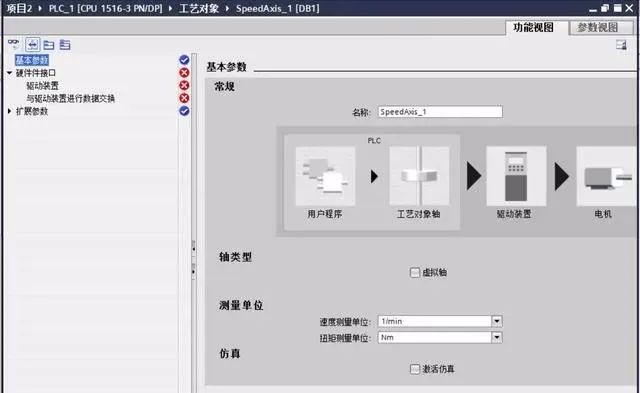
在工藝對(duì)象目錄下點(diǎn)擊新增對(duì)象,找到運(yùn)動(dòng)控制的速度軸對(duì)象,添加。

速度軸的對(duì)話框中可以選擇基本參數(shù)、硬件接口以及擴(kuò)展參數(shù)。
在硬件接口中選擇前面硬件組態(tài)中添加的Cu310。

選擇"運(yùn)行時(shí)自動(dòng)應(yīng)用驅(qū)動(dòng)值"。

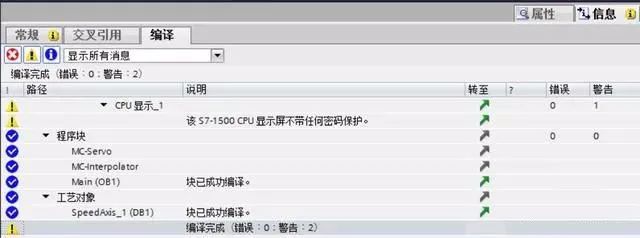
配置完畢后點(diǎn)擊編譯按鈕,對(duì)項(xiàng)目進(jìn)行編譯。
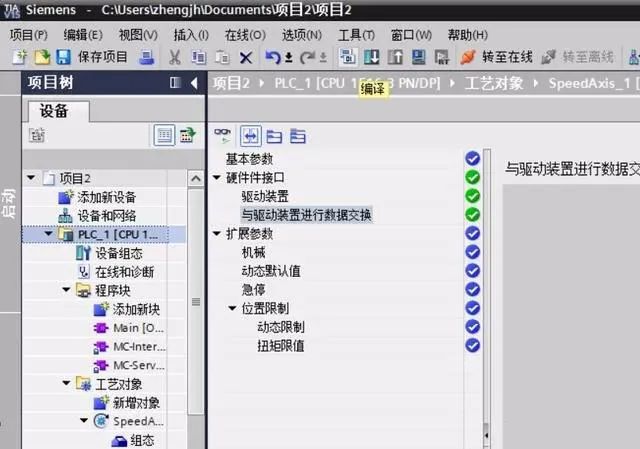
結(jié)果在軟件下方顯示,沒有錯(cuò)誤。
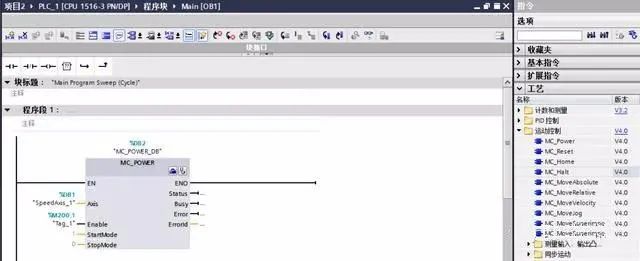
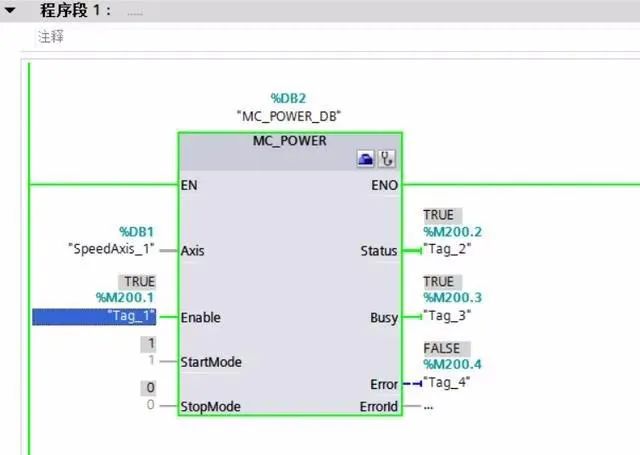
在OB1中添加功能塊,MC_POWER,在Axis輸入端選擇之前添加的速度軸。
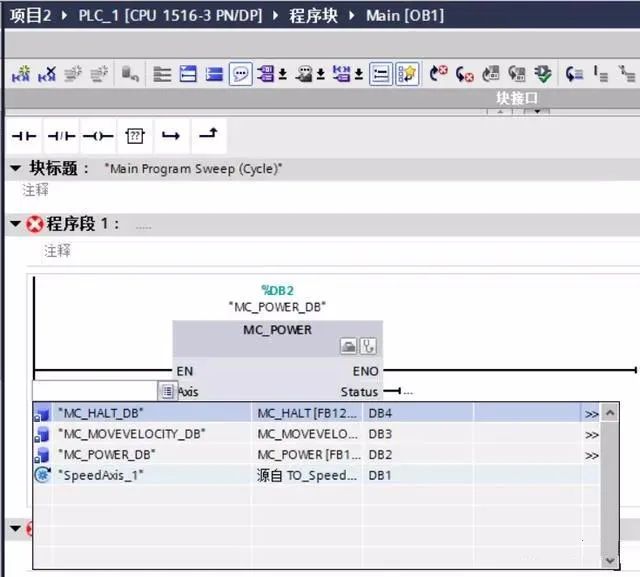
將各個(gè)輸入輸出引腳配置相應(yīng)的變量。
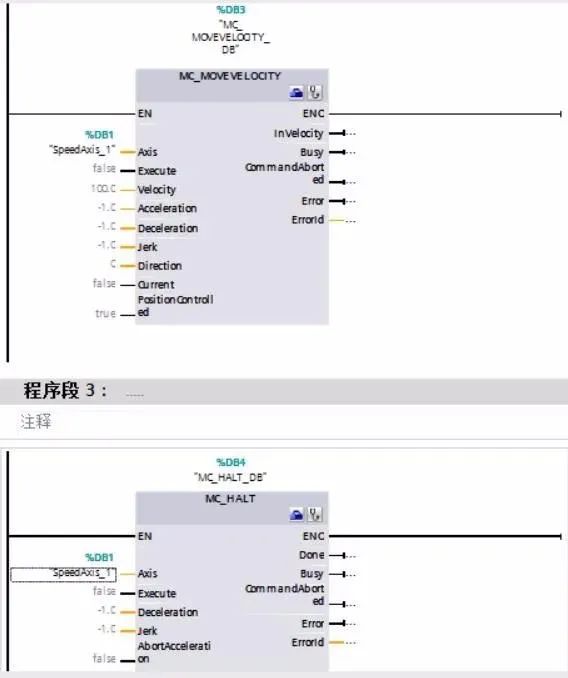
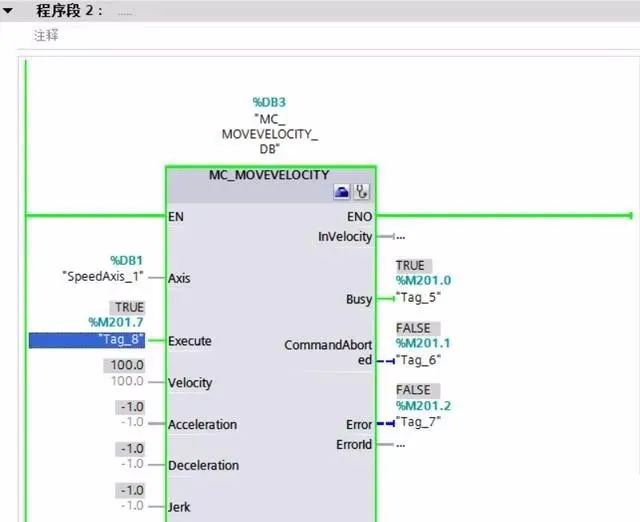
后面再添加MC_MOVEVELOCITY和MC_HALT。分別用于控制軸的啟動(dòng)和停止。
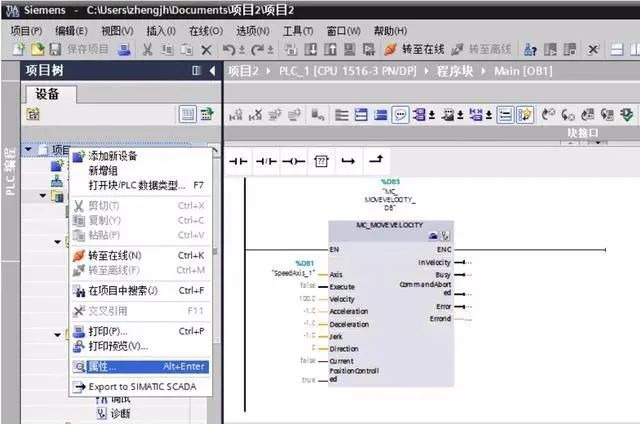
配置完畢后右鍵點(diǎn)擊項(xiàng)目,選擇屬性。
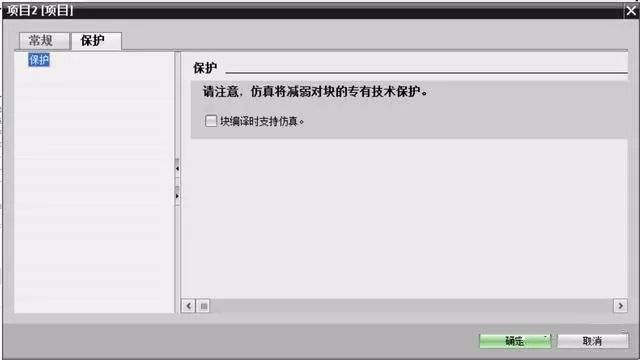
對(duì)話框中選擇"塊編譯時(shí)支持仿真",否則后面仿真會(huì)報(bào)錯(cuò)。
運(yùn)行仿真軟件,選擇PLC為SIM-1500。

在擴(kuò)展下載對(duì)話框中可以找到模擬運(yùn)行的PLC

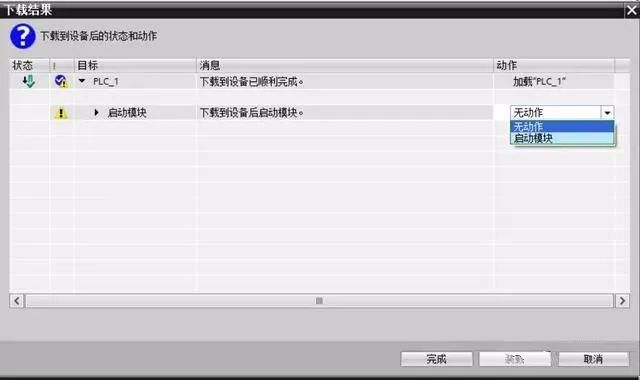
下載項(xiàng)目,選擇啟動(dòng)模塊
監(jiān)控項(xiàng)目給功能塊使能
啟動(dòng)運(yùn)行。默認(rèn)速度為100轉(zhuǎn)/分
在診斷界面可以進(jìn)行監(jiān)控實(shí)際速度。

如果要停止就給MC_HALT功能塊信號(hào)。要注意使用該速度功能塊不能連續(xù)調(diào)整速度。每次設(shè)定速度值后需要再次給Execute信號(hào)。
-
控制器
+關(guān)注
關(guān)注
112文章
16446瀏覽量
179456 -
西門子
+關(guān)注
關(guān)注
95文章
3062瀏覽量
116447 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9083瀏覽量
146374
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
雅馬哈機(jī)器人配置方法之西門子S7-1500控制技巧分享
西門子1500PLC采集modbusRTU儀表數(shù)據(jù)
西門子S7-1500憑什么秒殺S7-300/400?
ABB六軸機(jī)器人與西門子1500PLC使用手冊(cè)
merlic與西門子PLC?S7-1500的通訊案例
merlic軟件與西門子S7-1500的通訊過程分析
介紹西門子電機(jī)變頻調(diào)速控制創(chuàng)建軸并模擬運(yùn)行的過程
西門子PLC S7-1500系列的工藝模塊說明
西門子PLC S7-1500系列與西門子變頻器G120之間實(shí)現(xiàn)DP通訊功能
西門子1500系列PLC速度軸配置與仿真

西門子PLC產(chǎn)品系列有哪些
西門子PLC S7-1500系列介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論